SCI论文(www.lunwensci.com):
摘要:为弥补光机电智能制造、机器视觉等新专业实验装置短缺、学生自主创新实践能力亟待提升等问题,设计了一种基于机器视觉的十轴协作教学贴标机,机体机械部分设计呈对称稳定结构,可降低视觉捕捉难度以及图像处理稳定性;采用雷赛DMC3C00控制卡和ACC-XC00驱动器作为步进电机与伺服电机主控装置,建立机械轴运动学模型;利用Halcon图像处理软件HDevelop完成对图像的高斯滤波、阈值增强、转换区域形状、分割图像、腐蚀膨胀、特征提取、模板匹配识别工件,确定视觉工件中心点坐标,将坐标信息转化为机械轴各轴运动脉冲完成对工件的控制。通过该实验平台,进行图像采集与处理、运动控制、电机接线以及上位机软件开发等,多方面的教学。经历多班次教学实验证明,该实训系统能够有效培养学生的学习兴趣、实践能力和创新能力,取得良好的教学效果。
关键词:机器视觉;十轴协作;光机电一体;综合训练
Research and Design of Ten Axis Cooperative Teaching Labeling Machine Based on Machine Vision
Wei Honglei1,Liu Chenghao1,Wang Jing1,Yang Yining1,Ma Xiaoguang2,Zhao Jianbang2
(1.School of Mechanical Engineering and Automation,Dalian Polytechnic University,Dalian,Liaoning 116034,China;2.Dalian Shipbuilding Industry Group Co.,Ltd.,Dalian,Liaoning 116021,China)
Abstract:To compensate for optical smart new professional experiment equipment shortages such as manufacturing,machine vision,students'independent innovation practice ability to ascend,a kind of based on machine vision ten shaft collaborative teaching labeling machine was designed,the mechanical parts of the body was symmetrical and stable structure design,which could reduce the difficulty of the visual capture and image processing.Resse DMC3C00 control card and ACC-XC00 driver were used as stepper motor and servo motor control device,and the kinematics model of mechanical shaft was established.Halcon image processing software HDevelop was used to complete gaussian filtering,threshold enhancement,transformation of region shape,image segmentation,corrosion expansion,feature extraction,template matching to identify the workpiece,the central point coordinates of the visual workpiece was determined,and the coordinate information was converted into motion pulses of each axis of the mechanical axis to complete the control of the workpiece.Through the experimental platform,students can learn image acquisition and processing,motion control,motor wiring and upper computer software development and other aspects.The multi-shift teaching experiment proves that the training system can effectively cultivate students'interest in learning,practical ability and innovation ability,and achieve good teaching effects.
Key words:machine vision;ten axis cooperation;optical and mechanical integration;comprehensive training
0引言
随着全球科技创新持续发展,智能社会正在向我们走来,世界大国把制造业作为促进经济发展的战略选择,各大国家提出不同的有关制造业的计划,中国提出了《中国制造2025》[1]计划,致力于实现从工业大国向工业强国转变,针对人才缺乏问题,2017年教育部批准成立“智能制造工程”专业[2],2018年苏州大学开设了智能制造新工科专业,新专业涉及新技术,实践性强,为紧跟国家发展,提供专业建设要求,提升学生创新实践能力,亟需教学平台供学生学习[3-4]。
光、机、电一体化技术已成为当前社会发展大势所趋,提高工业上工作效率,在智能制造中有绝对的优势[5-7],本文提出集光机电于一体的贴标机控制系统,涉及知识广、内容丰富、实践性强,易于激发学生的学习兴趣,培养学生拓展能力、提升创新能力。但在目前国内贴标机产业中大部分用途为工业生产。马博文等[8]提出一种基于CarSim、Isight及MATLAB仿真平台的前悬架K&C特性参数的优化方法;Márcio Mendona[9]基于神经网络学习相机标定,提出了一种神经校准方法;于凯旋等[10]运用系统图像处理算法提高芯片检测效率;李瑞丹等[11]提出了一种工业化的紧凑型桌面贴片机。
为紧跟智能制造发展,抓住社会发展趋势,解决光机电一体化设备教学应用设备较少的问题,本文提出一种基于机器视觉的十轴协作贴标机控制系统,使学生充分了解智能制造的优势,培养学生兴趣、实践能力和创新能力。
1硬件设计
1.1机械结构设计
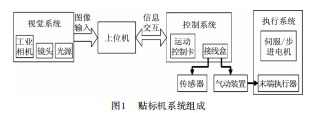
本研究贴标机组成如图1所示,由视觉系统、上位机、控制系统、执行系统组成。其中视觉系统包括工业相机、镜头、光源,控制系统包括运动控制卡、接线盒、传感器、气动装置,执行系统由伺服/步进电机、末端执行器等组成。
本设计优势在于增加了视觉系统,为保证图像捕捉的精准度,除了机台底盘要求极其稳定以外,还需要相机抓取图像快速、稳定、清晰。工业相机采用海康威视工业相机系列产品,海康在2016 Vision China中展现出其面阵、线阵相机强大的缺陷检测、定位引导等功能[12],大大提升了图像处理的效率,使运行程序更加稳定,并且可以让学生学习到丰富的视觉内容,培养学生在视觉领域的兴趣。
1.2平台组成
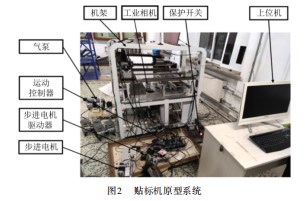
贴标机实训平台实物如图2所示,本实验平台需满足结构紧凑,设计简单,响应灵敏等设计特点,所以选择步进电机作为驱动电机。该平台包括两套伺服电机八套步进电机;一套雷赛DMC3C00控制卡和ACC-XC00驱动器;一套气动末端执行器;一台上位机,一台HIK‐ROBOT-CE系列相机等。上位机提供人机交互接口,控制贴标机自动运行完成自动贴标作业,并对机台实时运动状态进行监控。
2软件设计
贴标机软件系统主要为上位机程序编写,上位机主要实现贴标机的自动运行、点位示教、相机引导、IO控制、协作抓取5大实验功能,由C#语言编写,主要由主控制界面、系统设置界面、产品设置界面以及接口程序组成。在点位示教实验块中,操作人员可以在操作界面上通过修改点位参数、输出脉冲从而控制轴运动的机械坐标以及运动速度,在示教结束后按下主界面上的“复位”按钮,电机驱动轴回到预设初始值,实现贴标机整体复位。在相机引导模块中,操作人员通过抓取图片,框处ROI区域,获取图像模板,通过图像处理算法提取图像特征,来匹配后续图片。为培养学生灵活思维能力、创新创造能力,IO控制、协作抓取、自动运行模块设计成半开放性实验,由操作人员操作IO口的输入、输出从而控制吸盘完成抓取实验,可自主设置点位、IO开闭来控制多个轴在不同位置抓取的多样性。C#编写时设置多个接口,学生可自主在接口下编写代码,开发思维,丰富贴标机系统。操作人员自主设计好点位并保存到工程文件下,即可实现自动运行,并在协作抓取界面直观地监视抓取匹配的成功率。
3算法设计
3.1视觉示教控制变量算法
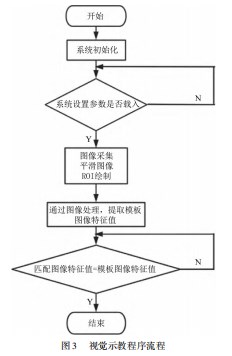
本设计由上位机控制相机抓取图像,进行图像处理提取特征值并匹配目标物料的操作。由上位机初始化系统数据,每个物料的特征是不同的,但机台坐标和相机坐标之间的转换关系是相同的,提取新物料特征之前要先确认系统设置是否已经载入。不同环境中光线变量难以控制,通过控制预处理中图像对比度以及曝光时间,使得最终处理图像的清晰度处在模板算子阈值内,从而得到稳定的模板特征值,完成示教。视觉示教控制变量流程如图3所示。
3.2工件特征模板生产及定位
不同的工件都有其独特的特征,特征提取生成模块用于匹配不同工件文件,创建一个特征模板ID。程序运行时对采集到的工件进行图像特征提取,与模板ID匹配,根据匹配结果确定是否为需要进行操作的工件及工件种类。
特征提取和模板匹配是机器视觉系统中极为重要的一环。Halcon提供的模板匹配方式主要非为两种:基于灰度值匹配和基于形状匹配。形状匹配可以做到即便是在恶劣的环境、混乱或非线性的光线、部分遮挡的情况下也能有极高的辨识度;灰度值匹配则是匹配在整个ROI区域内的所有特征,即便光线发生线性变化也能进行识别,但匹配的分值相对较低[13]。由于系统需要稳定性较高的工作环境,故采用基于行形状的模板匹配方法。提取工件特征模板及定位流程分为以下3步:(1)图像预处理。工业相机采集到的图像具有一定噪声,故需要对其进行降噪处理。使用scale_image和emphasize算子调整图像对比度并进行增强;调用gauss_image对图像进行高斯平滑处理,对邻域内像素进行平均,给予不用位置像素不同值,消除高斯噪声。(2)生成特征模板。调用Halcon的create_shape_model算子输入金字塔层数、允许旋转角度等参数,生成一个特征ID。(3)视觉定位工件坐标信息是整个贴标机系统的核心,获取图像平面坐标转化为机械坐标信息,从而控制精准抓取工件。调用Halcon的find_shape_model算子配合特征模板ID生成Score,通过Score与预设分数判断是否存在与模板相似的工件。得到工件坐标信息通过视觉比例尺转换成机械坐标,最后发送给控制卡进行贴标校准运动。
3.3二维仿射变换求转角算法
在基于机器视觉的十轴协作贴标机系统中,比较目标物料相对模板物料转角是不可或缺的一步,传统的提取物料最大外接矩形,并根据矩形边角四点求出中心点坐标,对比求出转角的方法需要图像有良好的清晰度,由于算法本身缺陷,迭代出最终结果飘忽不定,导致匹配失败,往往达不到想要的效果[14]。
本设计采用二维放射变换的方法,能够在一定程度上减小图像清晰度带来的影响,可以更准确地得到物料相对偏移角度。创建初始目标函数为:
定义一个二维坐标:
 为了能实现旋转我们规定在二维坐标基础上补充一个1,即:
为了能实现旋转我们规定在二维坐标基础上补充一个1,即:
 式(3)中x、y、1分别代表的二维坐标的x坐标,y坐标以及规定的其次变换矩阵。
式(3)中x、y、1分别代表的二维坐标的x坐标,y坐标以及规定的其次变换矩阵。
经过极坐标转换得:
 逆时针旋转α后带入 (3) 得最终旋转公式
逆时针旋转α后带入 (3) 得最终旋转公式

式中:α为旋转角度。
旋转角度识别与定位具体步骤如下:
(1)从视觉摄像头获取图像模板数据,提取其中图像中心横纵坐标x、y,作为输入数据;
(2)将待测物料移动到视觉捕捉范围内,获取图像数据、提取待测物料中心横纵坐标x0、y0,作为输入数据;
(3)将(1)与(2)中的输入数据代入公式,通过计算机计算得旋转角度。
4实验功能测试
4.1视觉引导测试实验
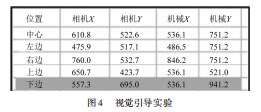
视觉引导测试实验数据如图4所示,学生可通过更换不同焦距摄像头抓拍不同距离图像,来进行标定与图像处理。还可选择Canny、SGBM以及SSD等算法来识别
目标物料中心点坐标,反馈给控制卡,来引导贴标机精准抓取目标物料。
4.2点位测试实验
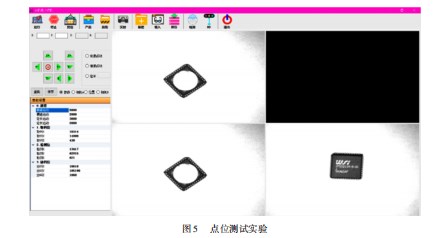
点位测试实验如图5所示,通过点击不同方向轴位按钮,控制贴标机驱动到想要到达的点位。本系统速度示教设置分为快速移动与慢速移动。快速移动:轴以较高的速度移动;慢速移动:轴以较低速度移动。本系统移动示教设置分为点动与定长。点动:点击轴位方向按钮,得到脉冲驱动轴运动,反之则停止运动;定长:可给轴位移动设置指定距离,从而使轴运动到指定位置。也可通过点击“复位”按钮让贴标机还原动作程序,回复初始点位。
5结束语
为解决光机电智能制造、机器视觉等新专业实验装置短缺、学生自主创新实践能力亟待提升等问题,本文完成了基于机器视觉的十轴协作教学贴标机机械结构设计、硬件设计、上位机软件开发。为提高视觉采集精度,提出了控制变量法提高图像清晰度、二维仿射变换算法使目标物旋转角度的计算更加准确。基于机器视觉的贴标机控制平台贴近工程实际,学生既可以自己动手设计、无限想象、学习编程,同时也是一个了解多门理论知识、浅学工业流程的一个平台。由于在贴标机设计过程中,学生参与了整个任务的实施过程,动手操作,互相协作,认真学习,扩展思维,因此对整个过程产生了极大的兴趣,取得了不错的成绩。非常适合在新专业自主创新实践教学中推广应用。
参考文献:
[1]中国科学技术协会编辑部.中国科学技术协会主席韩启德在2015世界机器人大会开幕式上的主持辞(节录)[J].科技导报,2015,33(23):7.
[2]温秀兰,胡仰,姚波,等.基于双目视觉的双臂协作教学机器人研究与设计[J].南京信息工程大学学报(自然科学版),2021,13(3):304-310.
[3]孙茜,孙立宁.智能制造工程专业教学创新探索性研究[J].教育教学论坛,2020(48):183-184.
[4]贺顺,温秀兰.基于EtherCAT的六自由度自平衡平台设计[J].南京信息工程大学学报(自然科学版),2020,12(3):384-389.
[5]何戟.机电一体化技术应用现状及未来发展研究[J].现代工业经济和信息化,2021,11(10):144-145.
[6]韩会丽.工程机械机电一体化技术的应用与发展综合研究[J].时代汽车,2021(21):22-23.
[7]姚翠萍.浅析智能制造中机电一体化技术的应用[J].技术与市场,2021,28(11):80-81.
[8]马博文,麦云飞.一种新型贴标机贴标部分结构设计[J].农业装备与车辆工程,2019,57(12):128-132.
[9]Márcio Mendona.Camera Calibration Using Detection and Neu‐ral Networks[J].IFAC Proceedings Volumes,2013,46(7):245-250.
[10]于凯旋,邓圭玲,段吉安,等.基于机器视觉的芯片编号识别算法[J].现代制造工程,2020(4):1-5.
[11]李瑞丹,王国庆,苑文峰,等.紧凑型桌面贴片机系统研究[J].工业仪表与自动化装置,2021(2):81-83.
[12]本刊讯.海康机器人能量大进发,精彩亮相2016 Vision China[J].中国公共安全,2016(15):28.
[13]孙炼杰,樊臻.基于模板匹配的光纤收发PCB板目标检测[J].计算机应用与软件,2018,35(1):128-131.
[14]黄超,茅健,徐斌,等.基于最小外接矩形和Hough变换的定位算法[J].组合机床与自动化加工技术,2021(8):66-71.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/45695.html