



SCI论文(www.lunwensci.com)
摘要:在汽车生产装配过程中,如何避免汽车零件在生产线装配时发生错漏装风险是生产过程的难题。研发了一种基于YOLOv5s算法的零件防错装检测系统以解决零件错装问题。当汽车的轮毂、前后杠、尾标等零件在安装后,通过实时提取生产线摄像头视频帧,运用YOLOv5s算法识别图片中的零件,输出零件的标识(PR号),将识别出PR号与实际生产需求PR号对比,达到汽车零件防错装效果。在轮毂零件的模型训练中,所提检测系统的精确率为98.964%,召回率为97.863%,优于人工检测。
关键词:YOLOv5s;零件识别;零件防错;汽车装配;目标检测
An Anti-mis-assembly Detection System for Automobile Parts Based on YOLOv5s Algorithm
Li Wubo,Huang Li,Liu Xing,Guo Feng
(Foshan Branch of Faw-Volkswagen Automotive C o.,Ltd.,Foshan,Guangdong 528000,China)
Abstract:In the process of automobile production and assembly,how to avoid the risk of error or missing assembly of automobile parts in the production line is a difficult problem in the production process.A mis-assembly detection system for automobile parts based on YOLOv5s algorithm is developed to solve the problem of parts mis-assembly.After the installation of the wheel hub,front and rear bumper,tail marker and other parts of the car,the video frame from the production line camera is extracted in real time,the YOLOv5 s algorithm is used to identify the parts in the picture,output the part identification(Primären Number,PR number),then the PR number identified is compared with the actual PR number on the bill of material,so as to achieve the effect of preventing the mis-assembly of the car parts.In the model training of wheel hub Parts the accuracy rate of the proposed detection system is 98.964%and the recall rate is 97.863%which is better than manual detection.
Key words:YOLOv5s;parts identification;parts error prevention;automobile assembly;object detection
0引言
随着汽车行业发展及大众对汽车产品认识的提升,汽车的配置越来越丰富。为了避免在汽车生产时发生零件错漏装,以往总装车间采用加强出厂前人员检测来解决这一难题。从实际运行效果来看,人工的检测可靠性低,尤其是对于涉及多车型多配置零件,人工存在识别疲劳造成检测错误,导致的汽车配置错误,进而产生一系列售后问题,甚至导致经济损失。例如,一汽-大众佛山工厂总装车间总共有16种汽车轮毂零件,为确定4个轮毂是否异常,终检人员需绕车一圈检测。不仅存在人员识别错误风险,而且需要花费大量检查的时间。采用计算机视觉开展目标检测势在必行。
本文使用的技术是计算机视觉中的目标检测(objectdetection)[1]方向,是计算机视觉识别的重要研究方向,在工业检测/机器人/智能视频监控等方面的应用特别广泛,具有重要的现实意义[2]。2016-2018年期间,国内外的专家学者相继提出基于深度学习的单阶段目标检测的算法YOLO[3-4]系列和SDD[5]系列。2021年,UltralyticsLLC公司提出了YOLOv5算法,YOLOv5是现今较先进的目标检测算法,在计算速度上表现非常出色。YOLOv5根据网络模型宽度和深度的差别,从小到大依次递增分别共有4种版本,它们是YOLOv5s、YOLOv5m、YOLOv5l以及YOLOv5x[6]。其中,YOLOv5s是其中的网络深度和特征图宽度最小的,识别运行速率也最快。
在汽车机器视觉检测应用中,2020年,张丽秀等通过采用改进的YOLOv3算法实现汽车零件配置的识别,解决传统的终检人工作业检测的弊端[7]。为进一步提高识别速度和检测质量,基于YOLO系列中YOLOv5s具有体积小、速度快和易开发等优势,本文采用YOLOv5s算法,研发零件防错装检测系统,通过对汽车生产线过程中轮毂、前后杠、尾标等零件进行配置识别,取代了传统汽车零件装配后依靠人工检测。
1YOLOv5s目标检测算法
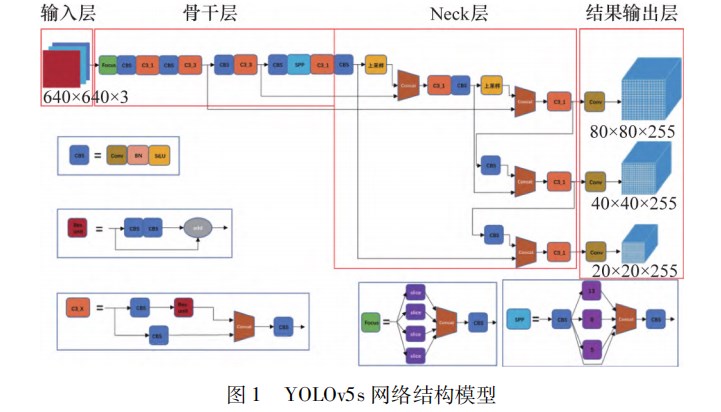
YOLOv5s网络由输入端(Input)、骨干网络(Backbone)、Neck层、输出层(Prediction)4个部分组成。其网络模型结构如图1所示。
1.1输入端(Input)
相对其他版本,输入端在Mosaic数据增强、自适应锚框计算、自适应图片缩放3方面做了优化提升,Mosaic数据增强通过4张图片的随机排布、绽放、裁剪的方式拼接形成一张新图片,然后将该张图片传入神经网络学习;自适应锚框是指针对不同的数据集,都需要设定特定长宽的锚点框;自适应图片缩放将自适应地添加最少的黑边到图片中,从而减少了计算量,提升了YOLOv5的推理速度。
1.2骨干网络(Backbone)
YOLOv5s的骨干网络(Backbone)结构由Focus结构、CSP结构[8]组成。Focus对图片做切片操作,从一张高分辨率的图片中周期性的取出像素点到低分辨率的图片中,图片的相邻位置进行了堆叠,提高了每个像素点的视野。新的图片再经过卷积运算,最终得到没有丢失信息的二倍下采样特征图。CSP主要将featuremap拆成两部分,一部分做卷积运算,另一部分和上一部分卷积运算结果进行连接。通过以上步骤,可以降低模型的计算量,提升运算速率。
1.3Neck层
Neck层是指一系统混合和组合图像特征的网络层,并将图像特征传递到预测层。YOLOv4的Neck层采用FPN+PAN结构,其中FPN层是自顶向下传达强语义特征,PAN是自底向上传达定位特征。YOLOv5仍采用的是这种结构,与YOLOv4不同的是,采用CSPNet设计的CSP2结构,增强了网络特征融合的能力,而YOLOv4的Neck只是进行普通卷积运算。
1.4输出层
YOLOv5s使用GIOULoss[11]作为损失函数,通过多轮次运算,不断地调整相应参数,使运算的锚框与实际锚框的误差值最小,最终得到最优的模型。
2汽车零件防错装检测系统
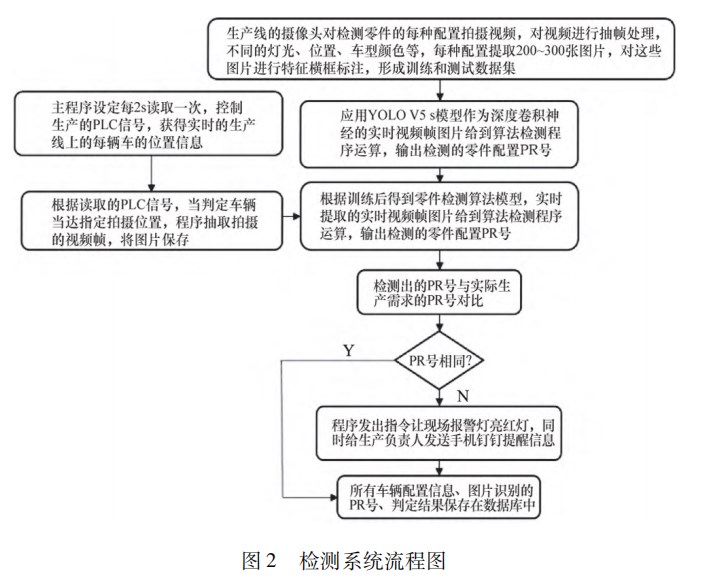
本文检测系统可用于摄像头拍摄下的汽车外饰零件检测,以汽车轮毂零件为例,系统整体流程图如图2所示。摄像头安装在轮毂零件装配后的工位,实时拍摄零件;检测系统设定每2s读取一次控制生产线的PLC信号(获得实时的生产线上的每辆车的位置信息);当车辆到达指定拍摄位置,系统多摄像头获取并保存1张视频帧图像,并调用YOLOv5s程序对保存图片计算,自动识别出零件配置信息(PR号),并输出标注的检测框图片;识别出的PR号与实际的生产需求PR号进行比对,如果PR号相同,则实际安装的轮毂零件正确,PR号不同,则实际安装轮毂零件配置错误,需要更换正确零件。系统保存识别的PR号,实际计划PR号,检测结果等检测信息,便于后续查询及问题追溯。
2.1系统环境及参数设置
本文中的汽车零件检测系统基于YOLOv5s算法,操作系统是Win10系统。首先需要配置Python3.8.5的虚拟环境。通过Anaconda3完成,在系统控制台建立一个命名为“yolov5”的虚拟环境,然后激活yolov5虚拟环境。YOLOv5s还依赖matplotlib,numpy,opencv,Pillow,tensorflow,pytorch等库,具体依赖库都保存在YOLOv5的开源文件“requirements.txt”中。控制台输入“pipinstall-rrequirements.txt”,打包安装所需的依赖库。
本系统的YOLOv5s训练过程的一些关键参数设置为:图片尺寸为640×640,初始学习速率设置为0.001,权重衰减系数为0.0005,网络优化方法选择为SGD,每次训练图片设置为64,训练轮数Epoch为300轮。
2.2数据集准备
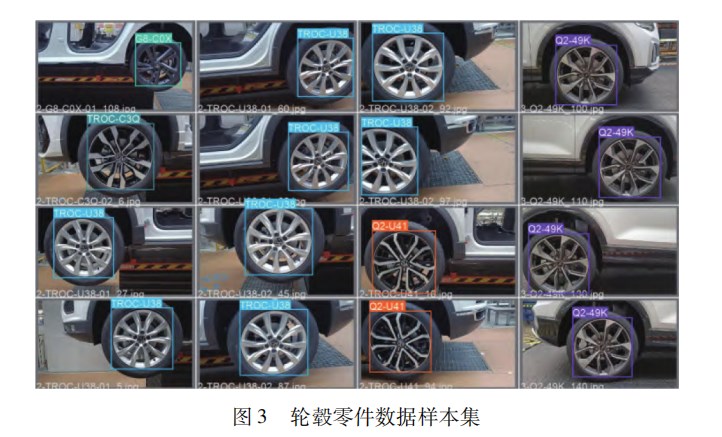
汽车轮毂作为汽车轮胎必备零件,样式种类多。本文案例中的轮毂共有16种,不同样式轮毂的PR号也不一样。为了增加训练的模型的准确性,每种轮毂共收集200~300张图片,分别在不同光线、分辨率、场景、位置条件下拍摄得到。数据集分为训练集和测试集,共包括5202张训练图片和572张测试图片。人工对训练集和测试集的图片打标签,使用的标注软件为Labelimg,生成训练所需的“.txt”标注文件,标注后的部分图片见图3。
在系统控制台输入“pipinstalllabelimg”,即可安装Labeling标注软件。使用Labeling软件对5202张训练图片和672张测试图片进行矩形框标注,标注文件包含5个数据,其中第1个数据为标签物体的类别,后面4个数据为标签物体在图片中的坐标信息。
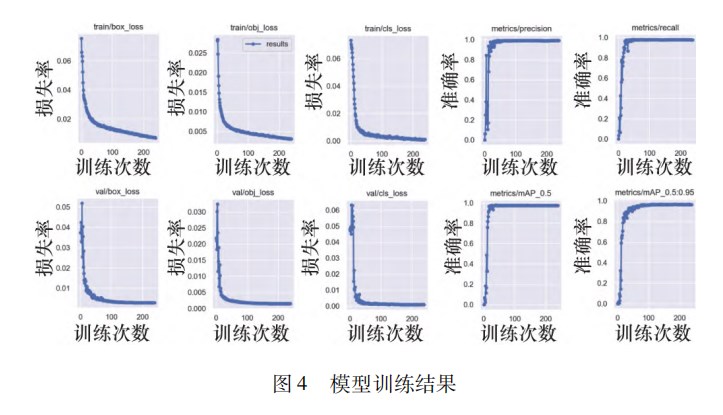
2.3模型训练及结果
本文的检测系统模型训练是在Featurize上,基于云GPU(显卡)进行训练,GPU型号为NVIDIA的RTX3060,拥有12.6G显存。
将标注好的训练与测试集,基于YOLOv5s算法进行模型训练,采用精确率(Precision)、召回率(Recall)指标作为评价指标,其值越大,说明训练得到的模型准准确度越高。精确率指模型对所有识别出的图片(包括正确识别和误识别为该PR号的图片),正确识别的图片所占的比例[12]。召回率指被正确识别的数量占总识别图片数量的比例[13]。经过训练得到的模型,设定IOU阈值为0.5时,结果为精确率为98.964%,召回率为97.863%,训练结果数据如图4所示。本系统的训练模型只有14.2MB,正是基于YOLOv5s的权重数据文件小,这样后续在实际检测中,单张图片识别的时间短,满足生产过程的检测实时性要求,实际运行中,该模型在识别时,CPU检测一张图片需要300ms左右,GPU检测一张图片需要15~20ms左右时间。
2.4检测系统的设备投入
本轮毂检测系统的整体成本为摄像头2台以及普通微型计算机1台,其他都是人力投入。摄像头采用海康威视全彩POE摄像头,单价不到500元,轮毂的检测需要在生产线左右两侧分别安装1个摄像头。采用1台微型计算机作为整个工厂所有的零件检测系统服务器,成本约5000元。综上,检测系统单次总投入在6000元左右。通过该项技术的运用不仅可靠性高,还可为每个零件的检测减少1个人力投入。
3检测效果与分析
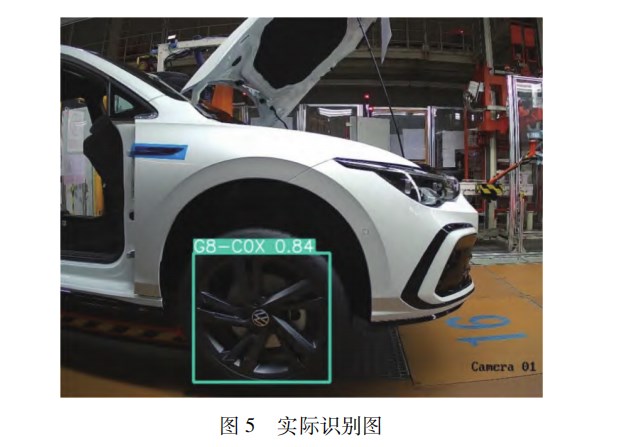
图5展示的是实际轮毂识别效果图,利用训练好的模型对摄像头拍摄的图片进行识别。图中的方框是通过模型训练后自动的描框,其中“G8-COX”指的是该轮毂的类别,即PR号,“0.84”是置信度(模型运算判断84%的概率是此PR号,系统设定0.5即可接受)。
根据实际生产线汽车轮毂零件检测结果,识别正确率在99%以上。本检测系统检测结果保存在一张数据库表中,如图6,便于后续问题追溯。图6中记录的是图片识别的PR号、判定结果、检测时间等信息。检测系统还有增加蜂鸣器及手机钉钉提醒功能,当检测到轮毂配置错误时,系统会让生产线的蜂鸣器响,并将错误信息实时发送到相应人的手机钉钉上。

4结束语
本文开发了基于YOLOv5s算法的汽车零件防错装检测系统,以轮毂零件为对象开展验证,通过图片的收集制作了轮毂的训练与测试数据集,使用Labelimg软件完成所有图片的人工标注,为了节省成本,使用云GPU完成了模型的训练。结果表明模型训练精确率为98.964%,召回率为97.863%,系统实际检测结果可靠。
系统解决了汽车生产制造过程中,多配置零件易造成错装的问题。目前已经在一汽-大众佛山工厂完成开发应用,该设备的投入低,能够极大地降低人力成本投入,且检测准确度与效率高。根据实际运行效果表明:该系统优于人工检测,可以满足在生产节拍内零件检测要求,进而提升车辆生产的质量,避免出现错装零件的汽车流入客户中。计划下一步将此技术扩展到零件供应商的生产过程防错检测。
参考文献:
[1]JIAOLC,ZHANGF,LIUF,etal.Asurveyofdeeplearning-basedobjectdetection[J].IEEEAccess,2019(7):128837-128868.
[2]宋甜,李颖,王静,改进YOLOv5s的车载红外图像目标检测[J].现代计算机,2022,28(2):21-28.
[3]REDMONJ,DIVVALAS,GIRSHICKR.Youonlylookonce:unified,real-timeobjetdetection[C]//ProceedingsoftheIEEEConferenceonComputerVisionandPatternRecognition,2016:780-788.
[4]REDMONJ,FARHADIA.YOLO9000:better,faster,stronger[C]//ProceedingsoftheIEEEConferenceonComputerVisionandPatternRecognition,2017:7263-7271.
[5]LIUW,ANGUELOVD,ERHAND,etal.SSD:singleshotmultiboxdetector[C]//EuropeanConferenceonComputerVision,2016:21-37.
[6]GlennJ.Purificationandcharacterizationofanextracellularmanganese(II)-dependentperoxidasefromthelignin-degradingbasidiomycetePhanerochatechrysosporium[J].ArchBiochemBiophys,1985,242.
[7]张丽秀,田甜,邵萌,基于改进的YOLOV3算法汽车零件配置辨识[J].组合机床与自动化加工技术,2020(6):150-153.
[8]HEK,ZHANGXY,RENSQ,etal.Spatialpyramidpoolingindeepconvolutionalnetworksforvisualrecognition[J].IEEETransactionsonPatternAnalysis&MachineIntelligence,2014,37(9):1904-1916.
[9]LINTY,DOLLARP,GIRSHICKR,etal.Featurepyramidnetworksforobjectdetection[C]//ProceedingsoftheIEEEConferenceonComputerVisionandPatternRecognition,2017:2117-2125.
[10]LIUS,QIL,QINH,etal.Pathaggregationnetworkforinstancesegmentation[C]//ProceedingsoftheIEEEConferenceonComputerVisionandPatternRecognition,2018:8759-8768.
[11]ZHENGZH,WANGP,LIUW,etal.Distance-IoUloss:fasterandbetterlearningforboundingboxregression[C]//ProceedingsoftheAAAIConferenceonArtificialIntelligence,2020,34(7):12993-13000.
[12]黄鸿发,梁小玲,李美正,等.基于机器视觉的空调外观关键质量检测技术研究[J].机电工程技术,2022,51(12):151-155.
[13]曹红,龚赛君,基于YOLOv5的高原耗牛图像目标检测[J].信息与电脑,2021(18):84-87.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!

据媒体报道,三大运营商目前均已制定了2020年... 详细>>

如何设计有效的环境治理政策, 是学术界和政策... 详细>>
