SCI论文(www.lunwensci.com)
摘要:针对无人机航拍图像检测存在小目标检测准确率低以及检测模型计算量过大的问题,提出了一种基于改进YOLOv5的无人机小目标检测方法。首先,针对小目标存在漏检的问题,在YOLOv5的特征提取网络中引入了高效通道注意力机制(ECA)模块,提高对小目标的特征提取能力,进而提高小目标检测精度;其次,针对模型计算量大的问题,将模型中的CBL模块进行改进,把其中的普通卷积替换为Ghost卷积,减少模型参数和计算量,以便于在小型嵌入式设备部署;最后为了进一步优化和改进YOLOv5算法,采用加权损失函数,以充分学习图像特征。在DOTA数据集上进行测试,实验结果表明,改进的模型提升了小目标检测效果,其mAp为73.1%,比原算法提高了1.9%,速度达到了92 ms,可以准确地完成无人机航拍小目标检测任务,同时也满足实时性要求。
关键词:小目标检测;无人机;注意力机制;Ghost卷积;损失函数
UAV Small Target Detection Based on Improved YOLOv5
Yi Huahui,Song Wenzhi,Huang jinxiang,Wang Yuxuan,Ding Rui
(College of Ordnance Science and Technology,Xi´an Technological University,Xi´an 710021,China)
Abstract:Aiming at the problems of low accuracy of small target detection and excessive calculation of detection model in UAV aerial image detection,a UAV small target detection method based on the improved YOLOv5 was proposed.Firstly,aiming at the problem of missed detection of small targets,an efficient channel attention mechanism(ECA)module was introduced in the feature extraction network of YOLOv5 to improve the feature extraction ability of small targets,thereby improving the detection accuracy of small targets.Secondly,in view of the problem of large calculation of the model,the CBL module in the model was improved,and the ordinary convolution in it was replaced with Ghost convolution to reduce the model parameters and calculation amount to facilitate deployment in small embedded devices.Finally,in order to further optimize and improve the YOLOv5 algorithm,the weighted loss function was used to fully learn the image features.Tested on the DOTA dataset,the experimental results show that the improved model improves the detection effect of small targets,and its mAp is 73.1%,which is 1.9%higher than the original algorithm,and the speed reaches 92 ms,which can accurately complete the UAV aerial photography small target detection task and meet the real-time requirements.
Key words:small object detection;drones;attention mechanism;Ghost convolution;loss function
0引言
由于国家遥感和农业部门的大力推动,无人机低空航空摄影已成为一项成熟的技术,并在不同领域实施了示范项目。基于低空无人机的航空摄影具有平台小、成本低、成像分辨率高、操作方便、机动性灵活、应用范围广等优点[1]。它是卫星遥感的有力补充。
无人机是低空航空摄影的理想平台,可以用高清传感器捕捉地面目标。图像分辨率远高于基于飞机的高空航空摄影。在较低的飞行高度,空中图像不受云层影响,使用高清相机获得的图像分辨率可以达到厘米级[2]。
随着网络技术的快速发展,无人机图像目标检测有着广泛的应用,包括智能视频监控、森林防火、农业信息、电力线检测、考古研究、道路桥梁损伤评估、军事侦察等[3]。此外,无人机图像在维护社会秩序方面发挥着至关重要的作用。
物联网与无人机相结合,可用于实时视频监控,以监控盲点。无人机航空图像数据量巨大,无法手动处理视频。处理视频内容的传统手动方法将导致遗漏和调试错误。因此,仅仅依靠人力资源进行检索是不现实的。
近几年以来,伴随着深度学习技术快速的发展,国内外的研究者逐渐将深度学习技术应用于小目标检测。Wang等[4]提出了一种基于SSD(Single Shot MultiBox De‐tector)的轻量、高效的特征融合模块,在保持检测速度的情况下提升检测精度,对小目标检测效果有所提升;Gong等[5]在特征金字塔网络(Feature Pyramid Network,FPN)[6]的基础上,添加一个融合因子描述相邻层的耦合度,来控制深层传递浅层的信息,提高了小目标检测性能;Pang等[7]提出基于多尺度融合的Faster-RCNN的小目标检测方法,提高了无人机对地面车辆目标的检测精度,但是模型参数较多,计算量大,实时性较低。Zhang等[8]提出了一种用于无人机图像目标检测的多尺度空洞卷积方法。增加了多尺度空洞卷积模块,以增加视野感知并改善网络在无人机图像中的目标分布。目标特征(例如大小和差异)的学习能力进一步提高了网络对无人机图像中多尺度和复杂背景目标的检测精度。Cui等[9]提出了一种改进的YOLOv3模型,结合超分辨率重建技术,用于无人机图像中的实时目标检测。该算法在复杂环境中具有较高的处理速度和鲁棒性。Qiu等[10]提出了一种改进的YOLOv3方法,用于无人机图像识别地面上的小目标。
本文根据无人机航拍图像小目标检测的特点,由于YOLOv5具有出色的速度和精度,改进了该版本的算法,并提出基于改进YOLOv5的小目标检测方法。首先,为了提高对小目标区域的关注程度,在骨干网络的特征提取模块中加入高效通道注意力机制(ECA)[11]模块,以增强对小目标特征的提取能力。其次,为了减少模型参数量和计算量,将CBL模块中的普通卷积更换为Ghost卷积,在保证算法实时性的同时提高算法精度。最后,采用加权损失函数,以充分学习图像特征。改良后的网络结构如图1所示。
2基于改进的YOLOv5无人机小目标检测
YOLOv5是一种单阶段检测算法,可以一次性输出预测框的位置和类别置信度,拥有极快的检测速度和较高的检测精度,在保证算法检测速度的同时又兼顾了检测精度。然而,YOLOv5实验通常在MS COCO数据集中进行,并不完全适用于无人机图像。由于无人机图像中存在背景复杂、目标小、目标检测相互遮挡等问题[12],YOLOv5算法对部分目标检测不准确,导致误检和漏检。
YOLOv5框架主要由3个模块组成,包括骨干网络模块(Backbone)、颈部模块(Neck)以及输出模块(Head),如图2所示,Backbone模块用于提取图像特征;Neck模块则是通过组合(Concat)图像特征的网络层,并将图像特征输出给Head模块;Head模块对图像特征进行预测,生成边界框并预测类别。在检测大目标具有明显的优势,而无人机航拍目标大多为小目标,为此,需要在无人机航拍目标检测任务上对原始模型进行改进。
2.1基于ECA注意力机制的YOLOv5
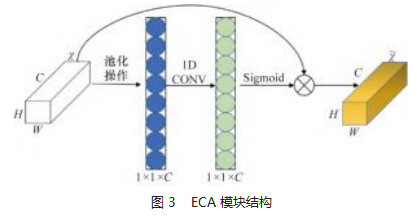
特征提取模块是目标识别中最重要的部分,由于无人机航拍图像中的目标通常比较小,为提高模型的识别精度,将高效通道注意力机制(Efficient Channel Atten‐tion,ECA)模块加入YOLOv5网络结构中的特征提取模块中,既可以强调小目标所在区域,又可以抑制不相关背景区域。ECA模块结构如图3所示,将ECA模块连接在残差块主干分支之后,首先经过一个不降低维度的通道级全局平均池化(GAP),在此基础上再利用一维稀疏卷积操作来捕获当前通道与它的k个邻域通道信息的交互,最后再使用一个Sigmoid函数生成通道权值,将原始输入特征与信道权重组合以获得具有信道关注度的特征。
在无人机航拍小目标检测任务中,通过不同的卷积信道提取目标的不同特征将导致太多的训练资源被用于无小目标区域,从而导致网络的训练效率低下。为了解决这一问题,本文将ECA-Net注意力添加到YOLO v5目标检测模型的特征提取层,具体网络结构如图4所示。通过添加ECA-Net-注意力模块,将不同的权重分配给不同的卷积信道,以突出小目标特征,通过适当的跨通道交互,避免了降维对学习通道的影响,大大降低了模型的复杂度,并且通过只添加少量参数,可以实现客观的性能改进。
权重的计算公式如下:
式中:σ为Sigmoid激活函数;yi为通道;wi为通道的权重;Ωik为yi的k个相邻通道的集合。
可以通过卷积核为k的一维卷积实现有效通道注意力模块,如下:
式中:C1Dk为卷积核为k的一维卷积;y为通道。
通过这种结构,模型可以选择性地增强包含目标特征更多的细节,抑制不相关或弱特征。本文提出的模型如图4所示,在骨干网络的最后一层加入ECA注意力机制。
2.2 Ghost卷积
在无人机航拍小目标的检测任务中,存在着大量重复的特征图。这些冗余的特征图对小目标检测不仅没有帮助,反而会增加检测模型的参数量,这些冗余特征图大多来源于常规卷积。因此,本文采用了Ghost卷积[13]去减少模型的参数和计算量以提高检测速度。
Ghost卷积分为常规卷积、Ghost生成和特征图拼接3步,如图5~6所示。第一步:使用比较少的卷积核对输入图像的特征图进行特征提取;第二步:进一步对提取出来的这部分特征图进行线性变换运算;最后通过拼接操作将两组特征图中的信息进行组合,生成最终的特征图。
与常规卷积相比较,Ghost卷积计算量很少,仅仅使用线性变换就能产生大部分的特征信息。因此,将模型中CBL模块中的普通卷积替换为Ghost卷积以减少模型的参数量和计算量,如图7~8所示,将GhostNet卷积作为CBL模块的的卷积层,利用Ghost卷积这些特征,可以减少模型的参数和计算量,模型更适合无人机航拍图像的小目标检测。
2.3加权损失函数
合适的损失函数有利于指导神经网络学习有意义的信息,为了充分学习图像特征,本文所设计的YOLOv5s模型采用了加权损失函数,包括交叉熵损失函数、DSC系数损失函数、IOU系数损失函数和Focal loss损失函数。
(1)交叉熵损失函数
交叉熵损失函数如下:
式中:ytrue为真实掩膜图像;ypre为改进的YOLOv5s目标检测网络预测结果。
交叉熵损失函数能够较好地衡量预测结果和真实掩膜图像之间的相似程度,并且不影响模型的收敛速度。
(2)DSC系数损失函数
Dice系数可以用于衡量两个集合的相似性,其值在[0,1]之间,定义式如下:
对于目标检测任务,其值定义为预测图片和掩膜图像之间重叠像素数量的两倍除以二者像素数量的总和,其定义如下:
预测图片和掩膜图像之间重叠越多,DSC值越接近于1;故通过下式将其转换为单调递减函数作为EFM-YOLOv5s语义分割网络的损失函数:
(3)IOU系数损失函数
IOU系数用于衡量两个集和的重叠大小程度,其值在[0,1]之间,定义如下:
对于目标检测任务,IOU计算的是“预测的边框”和“真实的边框”的交叠率,定义如下:
预测图片和掩膜图像之间重叠越多,IOU值越接近于1;故通过下式将其转换为单调递减函数作为EFM-YOLOv5s语义分割网络的损失函数:
(4)Focal loss损失函数
观察数据集可以发现,背景部分所占图片比例较大而目标部分所占比例较小,故选用Focal loss用于结局正负样本不均衡问题,Focal loss定义如下:
式中:ytrue为真实掩膜图像;ypre为改进的YOLOv5s的预测结果。
Focal loss能够使得模型更加专注于较难分类的样本,从而较好地解决了正负样本不均衡的问题。最终本模型的损失函数为上述4个损失函数的加权:
3实验与分析
3.1数据集
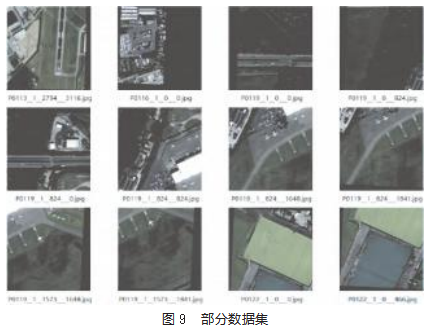
无人机航拍图像面临尺度变化大、目标小等问题,为了保证数据集的准确性,选用DOTA数据集。该数据集是从谷歌地球、中国卫星数据应用中心等来源收集的大型数据集,共有21 046张航拍图像,是一个用于航空图像中目标检测的大型数据集,包含了不同比例不同方向和不同形状的目标[14]。共有15种目标物体,如飞机、汽车、桥梁、舰船等,图9所示为部分数据集的样图。为了保证模型的有效性,将数据集划分为训练集和验证集,使用数据集中原始图像的75%作为训练集,25%作为验证集,训练集有15 749张图像,验证集有5 297张图像。
3.2实验配置
实验使用的开发平台为Windows10,平台具体配置如表1所示。
3.3评价指标
一般来说,评价一个目标检测模型的好坏,主要需要对精度进行评估,对精度进行评估主要参考平均精度和平均精度均值,因此,本文采用平均精度(Average Precision,AP)和平均精度均值(mean Average Preci‐sion,mAP)作为评价该模型的指标,计算公式如下:
其中,将召回率(Recall)作为横轴、检测精度(Precision)作为纵轴构成一条曲线,这条曲线下的面积就是Ap,Recall和Precision的计算公式如下:
式中:TP为正确分类的样本数;FP为被错误判定为正样本的负样本数;FN为被错误判定为负样本的正样本数。
3.4实验结果分析
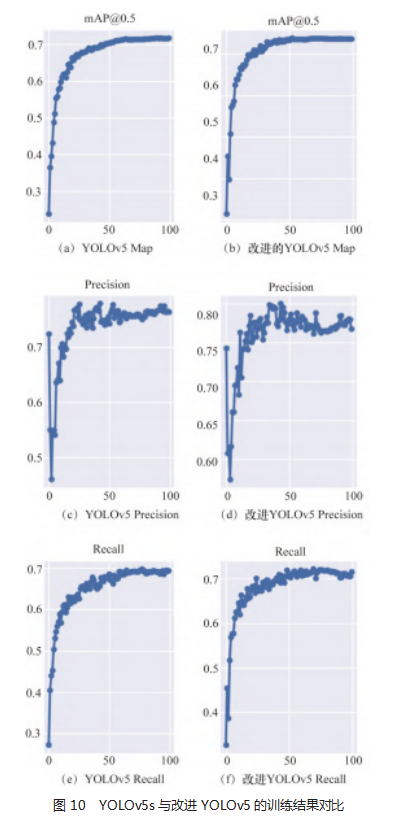
将DOTA数据集分别通过YOLOv5s模型和改进后的YOLOv5s模型进行训练,迭代次数设置为100次,训练过程中对应模型的结果对比如图10所示。由图可知,与原算法相比,改进的YOLOv5模型的平均精度,预测率和召回率都有一定的提升,拥有更高的精度。
改进的模型检测的各个类别的精度如表2所示,对比可知,改进的模型较YOLOv5模型,每个类别的精度均有所提高。
为了验证改进算法的先进性,使用同一数据集进行模型训练,将改进的算法与现阶段最具代表性的3种单阶段检测模型的检测效果进行对比,分别是YOLOv3[15]、YOLOv4[16]、以及YOLOv5,检测结果如表3所示。由表可知,相比其他模型,改进后模型的mAP、模型尺寸以及检测速度上均获得了比较好的结果。其中,mAP比其他的模型精度都高,模型大小与检测速度YOLOv5相近,模型尺寸约为YOLOv3模型的1/11,YOLOv4模型的1/12,检测速度比YOLOv3模型提高约62 ms,与YOLOv4相比,比YOLOv4模型提高约35 ms,在保证原算法YOLOv5模型检测速度的同时提高了检测精度。在检测精度上,比YOLOv5提高了1.9%,比YOLOv4提高了1.59%,相比YOLOv3高13.77%。
为了验证了本文改进算法对小目标检测的有效性,对验证集进行测试并且与原算法进行对比,结果如图11所示。YOLOv5模型对小目标存在漏检的情况,改进后的YOLOv5模型可以改善较小目标的漏检情况,提高小目标的检测精度。该实验结果表明,通过在YOLOv5模型中加入高效通道注意力机制,提升了模型对小目标的检测精度。
4结束语
本文针对无人机航拍小目标检测精度不高的问题,提出了基于改进YOLOv5的无人机小目标检测算法。该算法通过引入ECA注意力机制模块增强网络提取图像特征图信息,对提高小目标检测效果有所帮助。针对模型体积大、检测速度慢的特点,将CBL模块中的普通卷积更换为Ghost卷积,减少了参数量。为了减轻类间样本数量不平衡对模型分类损失产生的问题,使用加权损失函数改善无人机航拍小目标类间不平衡所导致的模型检测精度受限的问题。最后通过在DOTA数据集上进行测试,实验表明,所设计模型比原来的YOLOv5模型有着更高的准确率,在保证检测速度的前提下有效提高了检测精度,提升了无人机航拍小目标的检测准确率。
参考文献:
[1]朱华勇,牛轶峰,沈林成,等.无人机系统自主控制技术研究现状与发展趋势[J].国防科技大学学报,2010,32(3):115-120.
[2]向昌成,黄成兵,罗平,等.基于YOLO算法的无人机航拍图像车辆目标检测系统研究[J].计算机与数字工程,2021,49(8):1566-1570.
[3]徐光达,毛国君.多层级特征融合的无人机航拍图像目标检测[J].计算机科学与探索:1-13[2023-02-06].
[4]Wang Q,Zhang H,Hong X,et al.Small object detection based on modified FSSD and model compression[C]//2021 IEEE 6th In‐ternational Conference on Signal and Image Processing(ICSIP).IEEE,2021.
[5]Gong Y,Yu X,Ding Y,et al.Effective fusion factor in FPN for ti‐ny object detection[C]//Proceedings of the IEEE/CVF winter con‐ference on applications of computer vision,2021.
[6]Lin T Y,Dollár P,Girshick R,et al.Feature pyramid networks for object detection[C]//Proceedings of the IEEE conference on computer vision and pattern recognition,2017.
[7]Pang J,Chen K,Shi J,et al.Libra r-cnn:Towards balanced learning for object detection[C]//Proceedings of the IEEE/CVF conference on computer vision and pattern recognition,2019.
[8]张瑞倩,邵振峰.多尺度空洞卷积的无人机影像目标检测方法[J].武汉大学学报(信息科学版),2020,45(6):895-903.
[9]崔艳鹏,王元皓,胡建伟.一种改进YOLOv3的动态小目标检测方法[J].西安电子科技大学学报,2020,47(3):1-7.
[10]Qiu N H,Cao J,Ma J,et al.An improved small object detection method on drone[J].Electron.Des.Eng.,2020,28(12):79-84.
[11]Wang Q,Wu B,Zhu P,et al.Supplementary material for ECA-Net:Efficient channel attention for deep convolutional neural networks[C]//Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition,IEEE,Seattle,WA,USA.2020.
[12]刘芳,韩笑.基于多尺度深度学习的自适应航拍目标检测[J].航空学报:1-13[2022-06-18].
[13]Han K,Wang Y,Tian Q,et al.Ghostnet:More features from cheap operations[C]//Proceedings of the IEEE/CVF conference on computer vision and pattern recognition,2020.
[14]姚子康.基于深度学习的遥感图像目标检测[D].无锡:江南大学,2022.
[15]Redmon J,Farhadi A.Yolov3:An incremental improvement[EB/OL].https://arxiv.org/abs/1804.02767.
[16]Bochkovskiy A,Wang C Y,Liao H Y M.Yolov4:Optimal speed and accuracy of object detection[J].arXiv preprint arXiv:2004.10934,2020.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/58763.html