SCI论文(www.lunwensci.com)
摘要:为解决当前航空医学实验中人体离心实验的局限性问题, 根据以往医学实验数据和实验人员现状, 研究了一种多自由度、 可调节加速度 、带影像记录的人体复合训练设备 。选用 Solidworks 软件建立三维建模以及受力分析 。设备整体结构分为转轴装置、 转臂装置 、载人台装置 3 大部分组成, 其余包括底座装置 、 实验记录摄影装置 、控制模块装置 、显示屏装置 。控制模块选取 PLC 控制器作为控制系统, 配备上位机控制程序实现精准控制设备 。通过使用 Abaqus 建立有限元模型进行模态分析, 确保设备运行中 震动不会影响实验数据 。结果表明所设计结构符合实验要求, 实验多自由度可调节加速度的运行模式, 并且设备运行中配备监测 装置记录实验人员体征 。模态分析结果表明设备运行稳定, 总体设计与前人所设计的设备对比, 达到自由度调节灵活 、记录方便、 精准控制 、性能稳定等特点, 提高医学航天试验的效率并保证安全性。
关键词 :原理分析,多自由度,结构设计
Research on Multi Degree of Freedom Adjustable Human Compound Training Equipment Based on Medical Experiment
Zhou Haobin, Tang Shuai, Liu Zeqiang
(School of Materials Science and Engineering, Xi'an Petroleum University, Xi'an 710065. China)
Abstract: In order to solve the limitation of human centrifuge experiment in aviation medical experiment , a multi degree of freedom, adjustableacceleration and image recording human compound training equipment was studied according to the previous medical experiment data and thecurrent situation of the experimenters. Solidworks software was selected to establish 3D modeling and force analysis. The overall structure ofthe equipment was composed of three parts: rotating shaft device, rotating arm device and manned platform device. The rest included basedevice, experimental recording camera device, control module device and display screen device. The control module selected PLC controller asthe control system, equipped with the upper computer control program to achieve accurate control equipment . By using Abaqus to establish afinite element model for modal analysis, it was ensured that the vibration during equipment operation will not affect the experimental data . Theresults show that the designed structure meets the requirements of the experiment, the operation mode of the experiment with multiple degreesof freedom can adjust the acceleration, and the equipment is equipped with a monitoring device to record the physical signs of the experimentalpersonnel. The modal analysis results show that the equipment operates stably . Compared with the equipment designed by predecessors, theoverall design achieves the characteristics of flexible degree of freedom adjustment , convenient recording, accurate control, stable performance,etc., improving the efficiency of medical aerospace test and ensuring safety .
Key words: principle analysis; multiple degrees of freedom; structural design
0 引言
随着当前社会的不断进步和发展, 医疗及医学实验 变得尤为重要, 因此人体医学实验设备的需求也不断增 加 。分析与掌握人体离心机结构与稳定性是当前医学实 验的首要任务。
国内外对人体离心实验设备做了大量研究 。在新型 短臂离心机的研制与应用研究[1] 、人力短臂离心机的研 制与应用研究[2]等之前研究中 。上述研究虽然实现基本 实验要求, 但没有涉及到多自由度 、可调加速度 、实验 记录分析 。因而前人设计的设备存在一定的局限性。
本文设计的人体复合训练设备是一种基于离心机结 构及改进, 从而获得医学航空实验所需的离心力的人体 医学实验设备 。基于目前国内航空事业发展迅速, 但随 着飞机性能的增加, 飞行员在半空承受的 G 值不断提高, 高 G 值可引起飞行人员意识的丧失[1], 从而严重威胁飞行 安全, 并且长期处于失重环境下, 会对人体机理有一定 影响, 会导致流体静压消失, 体液头向分布, 引发机体 生理发生适应性变化, 对神经系统 、免疫系统 、血液系 统等造成不良影响, 在返回地面后, 飞行员会出现运动 力下降, 耐受力不足等一系列表现, 因此失重实验对于航空飞行至关重要 。本文采用 Solidworks 对实验设备进 行建模和受力分析, 分析目前实验当中存在的自由度和 加速度调节问题, 设计一种多自由度 、可调节加速度、 带影像记录的人体复合训练设备 。针对以前实验出现震 动的问题, 采用 Abaqus 建立有限元模型进行模态分析, 优化结构和实验参数实验稳定运行 。验证其准确性和有 效性。
1 总体设计原理
1.1 基本运动原理
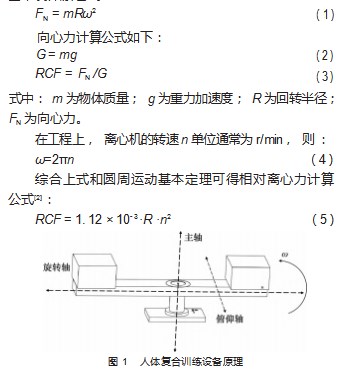
人体复合训练设备是基于人工重力原理和转臂结构 设计而成 。本装置由动力驱动部分 、齿轮传动部分 、工 作转臂部分 、载人台和控制柜部分组成。
如图 1 所示, 人体复合训练设备工作时, 主要分 3 个 方向的运动, 一是围绕主轴的旋转运动; 二是围绕旋转 轴的左右摇摆运动; 三是围绕俯仰轴的前后移动运动; 设备工作时围绕主轴以 ω 角速度旋转获得实验所需重力 加速度, 同时通过左右摇摆运动和前后移动获得方向不 同加速度 G 值, 以达到实验所需要求。通过调节转速大小 和复合运动来实验不同大小和方向的 G 值, 这是该设备 基本设计原理[3]。
1.2 复合运动离心力计算原理
本文的人体复合训练设备是一种基于基本圆周运动 获得离心力的训练设备, 同时通过复合运动来实验运动 中调节离心力大小的功能[4] 。为此设计了前后移动和左 右摇摆运动的设备结构, 通过前后移动调节半径 R 来调 节离心力大小, 通过左右摇摆运动来调节角速度 ω 实现 离心力的再次调节 。图 2 为离心力计算简图。
上式为相对离心力分量计算, 上式的计算有利于后 期设计设备结构数据和设计控制软件时的参数设定。
2 结构设计方案
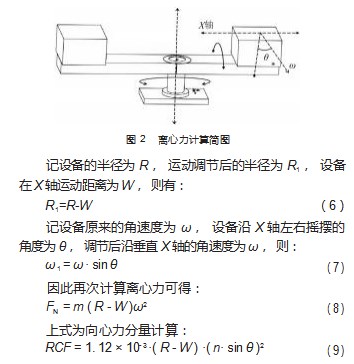
2.1 转轴结构设计
对于整个人体复合训练设备结构, 主轴的设计是最 为基础且重要的一步, 其中主轴起到整个设备的支撑作 用和旋转获得g值[5], 以及传递力和力矩的作用。所以主轴 的结构 、刚度等直接影响整体设备的性能 。如图 3 所示。 首先为了保证整体平稳运行, 采用强度较高, 厚度大的 旋转主轴支撑结构, 同时采用双轴承安装旋转支架结 构, 内部流通孔保证后续电机 、控制器 、驱动器 、pc 端等线路通过 。底座和主轴连接采用 4 cm 高强度钢圆 盘连接, 保证设备运转之后整体稳定性, 同时底座设计 多个螺孔, 使用刚强度螺丝与底部地面连接, 进一步加 强稳定性。
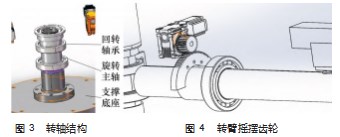
2.2 转臂结构设计
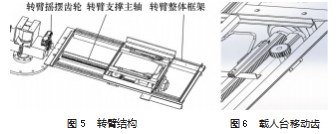
转臂是整个设备载人和旋转的主要承力部件 。但是 同时为了保证整个设备旋转的高速和平稳, 考虑风阻的 情况, 转臂不能过于庞大, 以及保证质量不能过大 。因 此转臂的结构合理性对于设备至关重要[6] 。如图 4 所示。
对于转臂的设计, 首先需要满足设备的基本运动和 自由度, 基本运动分为转臂的左右摇摆和自身转动, 为 此考虑结构简便高效下设计了转臂摇摆齿轮结构, 同时 为了保证设备的简洁性转臂摇摆齿轮设计为扇形齿轮, 与电机齿轮相啮合, 在设备运转时, 电机转动带动转臂 摇摆齿轮转动, 实现整体转臂左右摇摆运动[6] 。转臂的 整体框架设计采用 Q235碳素结构钢板同时只保留了框架受力结构部分框架, 其余均挖空最大程度减少设备质量, 提高整体设备运转速度以及平稳性 。如图 5~6所示。
2.3 载人台结构设计
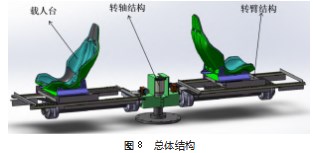
载人台是人体复合训练设备的最后重要一环, 载人 台结构关乎人体实验的舒适性, 复合运动的准确定, 设 备的美观性等 。载人台主要由载人台底座, 载人台座椅, 载人台移动齿和步进电机组成 。如图 7所示。
载人台的运动主要分为座椅前后移动和座椅俯仰 调节, 通过步进电机连接齿轮啮合载人台移动齿[7] 。通 过驱动电机达到载人台前后移动配合整体设备完成复 合运动 。 同时载人台前后带有正负限位开关防止出现 误操作[8]。
整体结构由底座框架连接转臂转轴, 转臂主轴转动 时带动整体转动, 载人台座椅通过两个滑轨连接在底座 上, 座椅前方配备一个踏板, 同时座椅可进行上下幅度 调整以满足人体舒适性, 座椅采用人体工学设计, 同时 前后的限位开关最大程度保护人体实验的安全性[9]。
3 总体结构
设计人体复合训练设备时, 主要需要解决多自由度 和可调节加速度的模拟, 为了满足实验需求, 还需计算 电机功率 、设备转速 、风阻等影响 。因此需要最大程度 简化设备结构, 达到实验要求, 保证实验真实性。
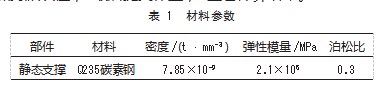
人体复合训练设备结构整体包括载人台 、转轴结构、 转臂结构, 驱动装置由一个伺服电机和 4个直流调速电 机组成 。如图 8所示, 整体设备承轴向形状, 设备配备电机驱动器, 控制器和上位机控制程序, 精准控制设备 运转 。设备整体安装与底部支座, 由电机向转轴提供动 力保证设备基本运行, 实验时启动上位机程序控制控制 器[10], 向电机发送指令, 主轴开始运转 。并提前计算实 验所需参数, 调节转臂结构左右摆动实现多自由度离心 加速度控制, 并通过转速和载人台前后移动控制离心加 速度大小, 实现实验模拟的真实性。
4 静态支撑模拟分析
静态支撑作为人体复合训练设备中重要的支撑部位 结构, 在设备运转时随着转臂结构的转动会发生周期震 动 。因此, 为了防止转臂结构和外部激励频率发生共振, 影响结构运转和实验数据, 在 Abaqus 中建立有限元模型 进行模态分析[11]。
为了减少计算机工作量, 对模型进行以下简化操作:
( 1) 将倒角 、 圆角和螺纹孔等忽略, 降低网格划分难 度, 提高计算精度和速度; (2) 保留主要力学特征, 将 不影响计算准确性的零件简化处理, 如: 螺栓 、螺母和 轴承等。
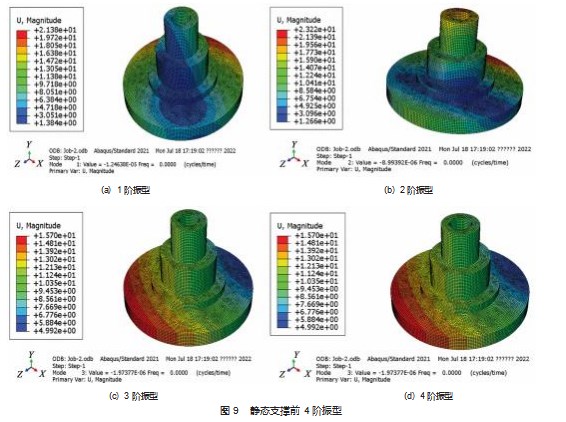
将简化后的模型在 Abaqus 中建立静止支撑的有限元 模型, 设置其材料属性; 静止支撑的材料为 Q235 碳素 钢, 输入材料的密度 、弹性模量和泊松比, 如表 1 所示; 然后建立装配体, 选择线性摄动中的频率分析; 然后设 置边界条件, 主要设置静止支撑底部完全固定; 然后进 行网格的划分, 单元类型设置为 ( C3D8R) 八结点线性 六面体单元[12], 近似全局尺寸选择合适参数, 其他参数 保持默认值; 最后提交作业, 查看计算结果。
静态支撑前 4 阶振型图如图 9所示, 固有频率如表 2 所示, 根据复合训练设备计算工作工程最大转速不超 过 25 r/min, 因此计算工作中所产生的激励频率远低于 1 246 Hz, 所以工作中不会发生共振, 结构运行稳定[13-14]。
5 测试验证与结果分析
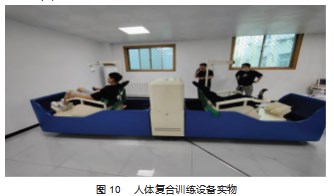
依据工程图纸对人体复合训练设备进行生产加工, 进行实际装配后, 主要关注机械结构是否出现装配错误,加工误差等 。运行途中是否出现干 、共振等问题 。加工 设备如图 10 所示[15]。
在设备测试过程中, 首先验证设备机械运转是否正常, 其次测试设备初期设计的多自由度和可调节加速 度, 通过控制模式精准控制设备转臂摇摆和前后移动, 设备在运转中可成功实现多自由度调节和加速度精准控 制 。且设备运转平稳, 无共振和噪声出现 。通过对设备的运行调试, 结果表明离心机总体结构可靠, 在最大转 速下, 运行过程稳定, 达到了预期效果, 并且满足最大 加速度变化率, 能够达到动加载实验需要 。在主轴运转 过程中, 实现了多个轴向的加速度模拟, 模拟出真实的 飞行环境 。最后经过参数设置和调整, 本方案的人体 复合训练设备预防了共振的发生, 综合性能满足实验 要求。
6 结束语
( 1 ) 对人体复合训练设备总体方案进行合理设计 、 设备运行状态进行分析研究 、设备运行震动进行测试研 究 。解决了人体复合训练设备实验中自由度单一的问题, 实现加速度精准可调节控制, 解决了以往设备运行中途 共振的问题[16]。
( 2 ) 本文对人体复合训练设备总体基本离心力进行 计算, 并对总体结构合理设计 。使用 Solidworks 对各个 结构进行设计并装配, 模拟设备运行状态进行合理改进。 最终确定人体复合训练设备的总体和各个零件尺寸, 计 算设备所需最大功率, 合理选型电机装配。
( 3 ) 在模拟运行等完成后, 加工各个结构, 选型 电机, 在工厂进行加工装配测试, 连接电机 、驱动器、 控制器 、上位机等线路, 最终装配完成测试设备实际 运行状态 。工作运行状态稳定, 满足实验要求参数 。 为研究人员对于人体在高空飞行状态下的身体情况提 供理论数据 。
参考文献:
[1] 赵金钢, 贾宏宇, 占玉林 . 旋转地震动及其对工程结构抗震性 能影响研究综述[J].地震工程与工程振动,2021.41(6):33-51.
[2] 何阳,蒋春梅,宋琼 . 离心式飞行模拟器发展概述[J]. 机械设计, 2017.34(12):1-9.
[3] 苏丹,闫维明,陈适才 . 基于通用有限元软件的混合模拟试验 两种实现方法与分析[J].世界地震工程,2017.33(1):10-17.
[4] 徐向前,周好斌 .人体短臂离心机实验台的显示控制系统[J]. 液晶与显示,2009.24(2):253-257.
[5] 钱学武,蔡体菁,尹航 . 一种旋转加速度计重力梯度仪重力梯 度解调方法[J].物探与化探,2015.39(S1):80-83.
[6] 王庆洋,曹登庆 . 齿轮传动系统的减振降噪研究[C]//第九届全 国动力学与控制学术会议会议手册,2012.
[7] 余兆炽 . 离心成型工艺与旋转震动现象[J]. 混凝土与水泥制 品,2011(7):34-37.
[8] 张翔,赵新春,石菲,等 .人体离心机对神经系统退行性疾病的 防治作用及相关机制研究进展[J]. 空军军医大学学报,2022.43 (2):91-95.
[9] 张毅,孙喜庆,杨长斌,等 .新型短臂离心机的研制与应用研究 [C]//2011 年空间生命与生命起源暨航天医学工程学术研讨
[10] 张玉 . 短臂离心机的应用基础研究[D]. 西安:第四军医大学,2010.
[11] 朱超 .短臂离心机锻炼对人体心血管功能的影响[D]. 西安:第 四军医大学,2008.
[12] 孙喜庆,姚永杰,杨长斌,等 .人力短臂离心机的研制与应用研 究[J].航天医学与医学工程,2003(1):10-13.
[13] 李鳌,刘剑雄,曾家兴,等 .振动摩擦焊机机架三维建模与模态 分析[J].农业装备与车辆工程,2022.60(7):147-149.
[14] 牛凯强,刘备,宋双路,等 .基于有限元的多孔结构金刚石圆锯 片模态分析[J].机械工程与自动化,2022(3):73-74.
[15] 周佩泉,张田 .振动筛筛箱试验模态分析[J]. 建设机械技术与 管理,2022.35(1):114-115.
[16] Tu MinYu,Chu Hsin,Lin YouJin,et al.Combined effect of heart rate responses and the anti-G straining manoeuvre effectiveness on G tolerance in a human centrifuge[J].Scientific reports,2020. 10.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/57105.html