SCI论文(www.lunwensci.com)
摘要 :基于国内外水下机器人的研究现状, 针对机动性能差 、复杂地形适应性弱等缺陷, 以鳄鱼为原型设计了一种可实现水陆两 栖运动的仿生机器人 。 陆地爬行方面选用微型 130 电机经齿轮箱多级齿轮减速将输出轴转矩传递给非同心滚轮实现其摆圆运动, 非同心滚轮带动铆接于连杆之上的鳄鱼四肢, 完成四肢间的步调协调进而实现鳄鱼的摇摆式爬行, 水下游动方面采用一对 8520 空 心杯电机对称布置在鳄鱼腹板两侧, 8520 空心杯电机带动螺旋桨桨叶为仿生机械鳄鱼水下提供动力推进, 微型 130 电机与8520 空 心杯电机均通过端子引线与 STM32 单片机进行连接, 通过控制端驱动微型 130 电机与8520 空心杯电机, 改变其端子电压并保证输 出一定的有效功率, 从而实现鳄鱼的前进后退与转向等运动, 并进行电机端子电压与输出扭矩试验, 试验结果表明, 当端子电压 为 4.5 V 时, 仿生机械鳄鱼有效动力达到最大。
关键词 :仿生机械鳄鱼,水下机器人,运动控制
Amphibious Bionic Crocodile Design and Underwater Application
Zhang Yibo, Li Wanzhong ※, Li Weibin
(School of Mechanical Engineering, Xi'an Shiyou University, Xi' an 710399. China)
Abstract: Based on the research status of underwater vehicles at home and abroad, a bionic robot that can realize amphibious movement on land and water was designed with crocodile as the prototype, aiming at the disadvantages of poor mobility and weak adaptability to complex terrain. In terms of land crawling, the micro 130 motor was used to transmit the output shaft torque to the non concentric roller through the gear box multistage gear reduction to achieve its swing movement. The non-concentric roller drove the crocodile limbs riveted on the connecting rod to complete the step coordination between the limbs to achieve the swing crawling of the crocodile . In terms of underwater swimming, a pair of 8520 hollow cup motors were symmetrically arranged on both sides of the crocodile web . The 8520 hollow cup motor drove the propeller blades to provide power propulsion for the bionic crocodile underwater. Both the micro 130 motor and the 8520 hollow cup motor were connected with the STM32 single-chip microcomputer through the terminal lead. The control terminal drove the micro 130 motor and the 8520 hollow cup motor to change their terminal voltage and ensured that a certain effective power was output , so as to realize the movement of the crocodile, such as forward, backward and steering. The test results of motor terminal voltage and output torque show that when the terminal voltage is 4.5 V, the effective power of the bionic crocodile reaches the maximum .
Key words: bionic mechanical crocodile; underwater robot; motion control
0 引言
广阔的海洋中蕴含着丰富的资源, 在陆地资源已被 大量发掘的今天, 海洋的战略地位越来越重要, 许多国 家将研究重心由陆地转向了海洋 。在充分发掘海洋资源 之前, 陆地与海洋衔接的板块是绕不过去的一道坎, 必 须先对这一领域具备充分的了解; 人类进入这样的未知 领域进行实地探测并不现实, 使用水下机器人替代无疑 是明智的选择, 而单一运动模式的水下机器人又难以胜 任这种复杂环境下的工作, 面对这种情境, 能够自由切 换水陆运动的两栖机器人较好地解决该矛盾[1]。
世界各国的科研人员纷纷仿照自然生物的运动机理, 成功研发出大量具有自然生物运动特点的仿生型水下机器人; 我国近 40 年以来在 NSFC (国家自然学科基金委 员会) 的大力资助下, 在水下机器人与两栖机器人研究 领域取得了巨大的突破 。哈尔滨工程大学开发的两栖仿 生机械蟹具有 8 足 、24 自由度, 采用直流伺服电机驱动, 以双四足步态[2]保证仿生机械蟹高速高效的行进, 能够 在浅水与两栖环境实现一定自主性作业; 中国科学院自 动化研究所研发的多连杆仿生海豚, 可实现偏航与俯仰 的运动, 且首次在水下机器人上实现了混合杂技特技[3]; 清华大学 、上海交通大学 、国防科技大学等都对水下仿 生机器人作了较深入的研究, 并取得了一定成果; 目前 国内外对于水下仿生机器人的结构设计和运动特性方面 有了一定的研究, 但是大多数水下仿生机器人的运动都具有单一性[4], 而目前已有的两栖仿生机器人包含机动 性能差 、复杂地形适应性弱 、两栖运动兼顾性差等缺点。
鳄鱼经过亿万年的进化演绎, 继承了鱼类祖先善水 性的特点, 又演变出了一套适应陆地生活的新性状, 这 种特性为两栖仿生机器人的设计提供了很好的生物原型。 本文以鳄鱼为生物原型, 设计了一种能够实现两栖运动 的仿生机器人, 致力于能够更好地融入水下环境, 完成 水下各项工作, 对于科研考察 、军事应用 、环境监测领 域有着重要的意义。
1 设计思路
对于绝大多数的两栖仿生机器人, 常采用的两栖运 动方式有两种: 桨叶式与波动式 。波动式是利用身体或 尾部协调摆动前进, 采用这种运动方式在陆地上运动时, 有较好的越障能力与运动稳定性, 但是运动的速度较低 且结构复杂, 关节多不易实现控制, 机动性能差; 桨叶 式是将螺旋桨推进器与陆地爬行机构组合起来, 并且能 够实现爬行和游动两种运动模式间的自由切换, 这种运 动方式环境适应能力比较好, 在崎岖不平的地形也能稳 定的运动, 且运动速度较快 。因此本文中仿生机械鳄鱼 的运动方式采用桨叶式, 并选择 STM32 单片机作为仿生 机械鳄鱼的控制系统。
2 设计分析
2.1 外形仿生设计
仿生机器鳄鱼在外形上要满足尽可能小的形体阻 力[5], 沿用仿生学中的类比和模仿的方法, 仿照真实生 物鳄鱼的外形, 如图 1 所示。
考虑到水下环境, 材料首先应具有良好的密封和防 水性能, 仿生机器鳄鱼的外壳模型采用树脂 3D 打印技术 一次成型的流线型刚性外壳, 采用刚性外壳不仅可以为 内部的控制系统与运动机构尽可能提供大的设计空间, 也可以将有限的空间资源运用到亟需的有效负载, 同时 最大程度简化系统, 增加了系统的可靠性; 鳄鱼内部为 中空腔体, 内置系统电源与 STM32 单片机, 利用热缩蒙 皮作为鳄鱼外壳的衣体, 使其具有良好的防水性能, 如 图 2 所示。
2.2 机械设计
驱动系统是仿生机械鳄鱼的运力来源, 其性能的优 劣直接决定了仿生机械鳄鱼能否有效的进行运动, 为了 使鳄鱼具有较高的行动速度和良好的机动性, 应选择重 量较轻 、扭矩较大 、反应速度快 、可变频调速 、机械效 率高的驱动装置 。考虑到鳄鱼的爬行方式具有时变性和周期性, 因此本文中所设计的仿生机械鳄鱼采用电机驱 动的方式, 如图 3 所示。
仿生机械鳄鱼的陆地爬行运动主要通过微型 130 驱 动电机将转矩输入齿轮减速箱, 经齿轮减速箱多级减速 将转矩传递给输出轴, 输出轴的转动带动非同心滚轮作 圆周运动, 非同心滚轮以间隙配合铆接于连杆槽孔中, 连杆上设有卡槽用以固定肢体连接件防止鳄鱼肢体发生 周向转动, 非同心滚轮牵引连杆作往复圆周运动, 鳄鱼 四肢通过肢体连接件铆接于连杆限位孔中, 连杆的往复 圆周运动驱动鳄鱼四肢间的步调协调进而实现鳄鱼的摇 摆式爬行, 如图 4 所示。
如图 5 所示, 0~3T/4 时间内连杆的相对运动位置, 在驱动电机的带动下非同心滚轮作圆周运动; 0T 时刻, 非同心滚轮位于圆周最右侧; T/4 时刻, 非同心滚轮转过 90°带动连杆运动至圆周最高点, 此时鳄鱼腹部与地面距 离最小; 1T/2 时刻, 非同心滚轮转过 180°带动连杆运动 至圆周最左侧; 3T/4 时刻, 非同心滚轮转过 270°带动连 杆运动至圆周最低点; T/4 时刻后, 非同心滚轮回到起始 位置, 此后过程依次重复循环。
当仿生机械鳄鱼运动时, 会面临既要陆地爬行又要 水中游动的工作环境, 这就要求仿生机械鳄鱼的水陆运 动模式能实现有效的切换, 因为水中和陆地的运动环境不同, 仿生机械鳄鱼采用的驱动方式也不尽相同, 这就 要求驱动模式能在极短时间内完成转变; 而当采用水陆 复合推进机构时, 驱动方式的转变意味着控制系统的参 数要在水陆两种模式之间进行变换[6], 但是如果直接从 一种控制模式切换到另一种控制模式时, 因其运动惯性 的存在, 鳄鱼的运动方式不可能发生瞬间的转变, 这时 就有可能会引起运动机构之间的相互干涉而导致运动失 稳, 从而达不到预期的运动效果, 因此本文中的仿生机 械鳄鱼采用两套驱动机构来实现两栖运动。
为保证仿生机械鳄鱼在水下平稳游动, 鳄鱼需在水 体中保持悬浮态, 因此其整体密度必须接近液体介质的 密度, 而仿生机械鳄鱼的质心位于腹板后半部分, 因此 需要附加一定的配重[7], 才能实现上述要求, 如图 6 所示。

同时为了避免仿生机械鳄鱼在水下产生静态横倾角, 在设计过程中, 各项设备的布置左右对称, 要求保持其 重心位于中纵剖面上, 遵循这个设计原则, 成对的设备 以仿生机械鳄鱼的几何中心对称安装, 基于上述内容, 仿生机械鳄鱼水下游动的动力来源主要依靠于对称布置 在腹板两侧的一对 8520 空心杯电机, 带动螺旋桨扇叶为 鳄鱼在水下的游动提供推进力, 如图 7 所示。
2.3 控制系统设计
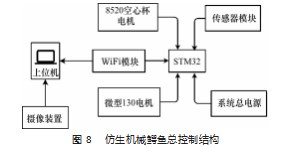
控制系统以 STM32 单片机为核心, 通过端子引线与 鳄鱼体内部各驱动电机建立联系, 实现仿生机械鳄鱼的 运动控制, 通过无线收发模块对传感器收集的数据进行 分析 、传输以及数据筛选等功能[8]。
对于运动控制, 将相应控制信息传输到指定指令接口, 驱动微型 130 电机与 8520 空心杯电机改变其输出扭 矩, 并保证输出一定的有效功率, 从而实现鳄鱼的前进后 退与转向等运动; 在运动的过程中, 利用姿态传感器以及 红外传感器来实现对运动方式的转变以及运动方向的更改, 同时保证仿生机械鳄鱼的姿态平衡并实现水下避障等功能。 图 8 所示为仿生机械鳄鱼总控制结构。
3 试验测试与结果分析
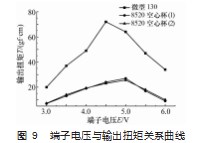
为保证仿生机械鳄鱼运动的可靠性, 对驱动电机端 子电压与输出扭矩进行了试验; 通过调节微型 130 电机 与 8520 空心杯电机端子电压, 改变电机的输出扭矩, 确 定了仿生机械鳄鱼输出最大有效动力时的电压。
由图 9 可知, 微型 130 电机与 8520 空心杯电机端子 电压与输出扭矩之间有如下关系; 微型 130 电机与 8520 空心杯电机的输出扭矩随端子电压的增大先呈上升趋势, 随电机的端子电压增大到一定程度时, 电机的输出扭矩 开始下降 。当端子电压维持在 4.5 V 左右时, 电机输出扭 矩达到最大, 此时仿生机械鳄鱼可输出最大有效动力。
4 应用前景
( 1 ) 水环境监测
利用水下仿生机器人配备的浑浊度传感器 、温度传 感器 、含氧量传感器 、PH 传感器 、叶绿素以及氨氮传感 器等来检测水环境污染标准的一些参数值[9], 并将传感 器收集的数据在前端经过数据处理, 经由中端将这些数 据传输给终端, 可实现定点定域的水环境监测。
( 2 ) 水下勘探
流体实时监测和浑浊水体目标探测是目前水下环境探测技术亟待解决的难题[10], 我国近海海域及内水广泛 分布着大量的浑浊水体, 这些水域水流复杂 、水体高度 浑浊 、水底地形多变, 在这样的极端环境下, 现有的监 测设备及目标探测技术无法有效发挥作用, 极大的制约 了人类在特殊水下环境执行环境勘察 、工程施工 、水下 安保 、抢险救援[11]等急难险重任务的能力, 而水下仿生机器人具有高机动 、低扰动 、无污染与高推进效率等特 点能够较好的应对上述恶劣环境。
( 3 ) 供水排污管道 、河底穿越管线监测
管道在长期服役状态下, 受到腐蚀 、冲蚀 、摩擦 、 重压及外部力冲击等作用, 内壁易产生漏孔 、裂纹及壁 厚减薄等现象, 造成管道破裂失效。一旦管道失效, 极易 引发严重的安全事故, 危及人身财产安全, 造成巨大的经 济损失, 严重者将会危害到生态环境安全; 由于水下仿生 机器人灵活多变, 可以到达工作人员无法进入的狭窄或复 杂空间进行作业, 同时还可携带必要的检测设备自由穿梭, 利用水下仿生机器人定期监测可有效避免此类事故的发生。
( 4 ) 水工构筑物 、基础设施缺陷检测与测量
水工建筑物包括大坝 、引水隧洞 、水库建筑设施等, 水工建筑物的状态监测对于其能否正常运行有着极其重 要的意义, 而水工建筑物通常采用定期排水人工检测的 方式, 而这种方式存在风险高 、效率低等方面的制约, 而水下仿生机器人能大幅缩短检测周期, 检测许多人工 无法检测的部位, 确保及早发现问题解决问题[12]。
基础设施在恶劣的水下环境造成的持续磨损和腐蚀 推高了维护成本, 这些任务目前主要使用遥控潜水器 ( ROV ) 进行, 通常需要系绳和人工操作员, 或者使用自 主水下航行器 ( AUV ), 它们的可访问性和可操作性受到 限制, 为了降低人工维护风险和维护成本,可利用水下仿 生机器人对水下电缆 、海上风场 、电场 、等多种水下基 础设施进行检查与测量[13- 14]。
( 5 ) 其他领域
水下仿生机器人未来的另一应用领域是研究使用多 水下仿生机器人组成的编队通过相互协调执行大规模海 底监测或探索任务, 例如海底测绘 、海洋考古学等, 水 下仿生机器人技术的进步为水下遗产遗址的测绘和记录 提供了高质量的数据采集解决方案[15]。
5 结束语
本文设计了一种能够实现陆地爬行与水下游动且结 构紧凑 、成本较低的水陆两栖仿生机械鳄鱼, 并对仿生 机械鳄鱼的爬行机构 、游动机构以及控制端进行了系统 性的设计; 仿生机械鳄鱼在运动方面采用了多电机组合 的驱动方式, 避免了一套复合推进机构在运动切换时导致 运动机构之间的相互干涉而引起运动失稳, 并对仿生机械 鳄鱼驱动电机的端子电压与输出扭矩进行了测试, 得出当 端子电压为 4.5 V 时, 仿生机械鳄鱼有效动力达到最大。
在人工控制的基础之上, 添加了姿态传感器以及避 障传感器, 确保仿生机械鳄鱼运动的稳定性, 实现仿生 机械鳄鱼的自主巡航及避障, 在一定程度上, 提高了鳄 鱼的灵活性; 仿生机械鳄鱼口腔及周身部位可接入诸类 数字传感器 (浑浊度传感器 、温度传感器 、含氧量传感 器 、PH 传感器 、叶绿素以及氨氮传感器), 可使其实现 多环境因子的监测。
该仿生机械鳄鱼致力于能够更好地融入水下环境, 进而完成各项水下工作, 对于科研考察 、军事应用 、环 境监测 、水工构筑物 、基础设施缺陷检测和测量 、供水 排污管道 、河底穿越管线监测等领域有着重要的意义。
参考文献:
[1] 林鑫 . 仿生机器鳄游动机构的设计与运动分析仿真[D]. 武汉: 武汉理工大学,2013.
[2] 王立权,孙磊, 陈东良,等 . 仿生机器蟹样机研究[J]. 哈尔滨工程 大学学报,2005(5):35-39.
[3] Junzhi Yu.Control of Yaw and Pitch Maneuvers of a Multilink Dol⁃ phin Robot[J]. IEEE Transactions on Robotics: A publication of the IEEE Robotics and Automation Society, 2012. 28(2):318-329.
[4] 王国彪, 陈殿生, 陈科位,等 . 仿生机器人研究现状与发展趋势 [J]. 机械工程学报,2015.51(13):27-44.
[5] 李成进 . 仿生型水下航行器研究现状及发展趋势[J]. 鱼雷技 术,2016.24(1):1-7.
[6] 杨清海,喻俊志,谭民,等 . 两栖仿生机器人研究综述[J]. 机器人, 2007(6):601-608.
[7] 徐加行, 言勇华, 于佳琳 . 多关节自主游动机器鱼的设计与控 制[J]. 机电一体化,2015(2):36-39.
[8]赵涓涓, 李强,任美荣,等 . 六足仿生机器人运动控制系统的设 计[J]. 机电工程技术,2008(12):44-45.
[9] 何建辉,李志军, 汤明新,等 . 一种用于水下检测的仿生机器鱼 [J]. 科学技术创新,2020(26):14- 15.
[10] 朱连利 . 水下触探仿生机构及其设计方法研究[D]. 武汉:华中 科技大学,2017.
[11] 杨壮凌,李春起,卢旭锦,等 . 具有救援工作模拟功能的仿生机 器人的研制[J]. 机电工程技术,2011(5):58-60.
[12] 巩宇, 曾广移,王文辉 . 长距离 、大深度水电站水下多控制模 式巡检机器人的研究与应用[C]//抽水蓄能电站工程建设文 集,2020.
[13] Gorma Wael. Development of Modular Bio-Inspired Autono ⁃ mous Underwater Vehicle for Close Subsea Asset Inspection[J]. Applied Sciences, 2021. 11(12) : 5401-5401.
[14] Cho Gun Rae. Evaluation of Underwater Cable Burying ROV through Sea Trial at East Sea[J]. IFAC PapersOnLine, 2020. 53 (2) : 9658-9663.
[15] 潘无为 . 分布式多水下机器人编队控制方法研究[D]. 哈尔滨: 哈尔滨工程大学,2018.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网! 文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/51825.html