SCI论文(www.lunwensci.com):
摘要:为了解决多个电源模块并联的高功率用电场合下电源模块的实时监控及传统调试方法工作量大的问题,设计了一种基于STM32芯片的抗干扰实时监控系统,并将该系统应用于多个模块并联的电源系统中,使得该多模块并联的电源系统能够实时跟踪每个电源模块电压电流信息,并在上位机界面中显示出来,且简化了电源的调试过程。该系统包含各个节点和上位机组成,各节点通过CAN总线和上位机实现交互通信,具备实时性高,通用性强,相比于传统的故障排查和检修过程,该监控系统对故障的排查和检修的效率更高,使用更加方便、直观。介绍了该系统的上位机软件的各个应用界面,并显示了所检测的电源模块电压和电流值随时间变化的曲线。
关键词:STM32;CAN总线;通信
A Debugging and Monitoring System Based on CAN Bus
Pan Liyun,Sun Qiangang,Liu Gang
(The 723 Institute of CSSC,Yangzhou,Jiangsu 225000,China)
Abstract:In order to solve the problem of real time monitoring of power modules and the heavy workload of traditional debugging methods in the high power electrical occasions where multiple power modules were connected in parallel,an anti jamming real time monitoring system was designed based on STM32 chip,and the system was applied in the occasion where multiple modules were connected in parallel,then the power supply system with multiple modules in parallel could track the voltage and current information of each power supply module in real time,and displayed it on the host computer interface.It simplified the debugging process of the power supply.The system consists of some nodes and the host computer,each node realizes interactive communication with the host computer through the CAN bus.It has high realtime performance and strong versatility.Compared with the traditional troubleshooting and maintenance process,the monitoring system highlights the advantages,such as troubleshooting and maintenance are more efficient and convenient.It shows that the various application interfaces of the host computer software of the system,and shows the curves of the detected voltage and current value of the power module with time.
Key words:STM32;CAN bus;communication
0引言
当前针对大功率及超大功率应用场合,模块化是开关电源发展的趋势,其优点是采用各个通用性的功能模块,将各个功能模块并联,构成新的系统来实现大功率输出,从而减少产品的研发周期及提高系统可靠性。然而多模块并联的系统中,由于模块数量的增多,各个模块的调试工作量大,单个模块是否正常工作,出故障时如何及时排查原因及检修难度大等问题也同时出现了。针对这些问题,一种能够实时采集数据,监控各个并联模块,简化调试过程的工具急需开发。CAN总线是一种可扩展性强,标准程度高,实时性好的一种串行数据通信网络,它功能强大且易于使用,现如今在很多场合都有应用。张河新等[1-5]介绍了各种基于CAN总线的数据采集及显示功能的设备,吴艳等[6]介绍了基于CAN总线的点菜设备,张强[7]介绍了CAN通信保护电路设计及常见故障分析。这些文献主要介绍的都是基于CAN总线的信息采集功能,没有辅助调试方面的能力。本文设计了一种基于串行总线的多机通信系统,该系统可以和电源模块通信,通过软件更改电源模块的参数,该通信系统线路少、整机结构简约、扩展能力强,系统包含各个节点和上位机,实时性好,可靠性高。实现了对多机运行的实时、同步控制。
1系统架构
CAN是控制器局域网络(Controller Area Network)的简称,是ISO国际标准化的串行通信协议。CAN具备极高的性能和可靠性,被广泛应用于工业化的各种设备上[8],考虑到CAN总线的卓越优势,本系统的架构也是基于CAN总线的。CAN总线的连接只需要两根线,即CAN_H和CAN_L,总线通过这两根线上的电位差来进行总线电平的判断,CAN总线分为两种电平,隐性电平和显性电平,二者必居其一。总线上显性电平相比隐性电平具有优先权,只要有一个节点输出显性电平,总线就是显性电平,当总线空闲时,如有多个节点同时发送信息,则会根据ID逐位决定优先级,根据显性电平优先的原则决定哪个节点获得首先发送报文的资格。
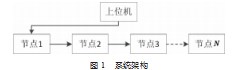
CAN总线的数据帧可以分为标准帧和扩展帧两种格式,标准帧有11位ID,扩展帧有29位ID。当CAN某个节点发送一个数据帧时,发送函数会把已打包完的数据帧发送到CAN总线上来实现数据发送。程序进入发送函数后,首先会判断发送缓冲区是否为空,为空则会将待发送数据输入发送缓冲区,随即启动发送。CAN报文接收函数往往以中断方式实现来提高程序效率,该函数的主要功能是读取CAN接收缓冲区的数据至RAM中。进入该函数后,首先判断接收缓冲区是否为空,若不为空就读取接收缓冲区的数据,进而实现报文接收的功能。本系统的架构如图1所示。
系统架构主要包括上位机、子节点。各节点具有采样功能,能采样各个电源模块电压、电流、温度等信息,且能和电源模块通信,能够读取和写入电源模块的参数信息。系统的上位机具有丰富的功能,主要分为调试模式及工作模式两种模式,调试模式时,上位机可以读取和写入电源参数以及对电源模块的实时工作状态进行监控,对电源输出电压电流值等需调试的参数进行调整。而在工作模式时,上位机可检测模块的电压电流及故障信息,对系统的运行进行监控[9],从而能在故障发生时能快速准确地定位故障模块及故障类型。系统的具体功能为:各节点接收上位机发来的控制命令,并执行,且回传响应报文;上位机可将子节点回传的报文信息在人机界面显示。实现了上位机与各节点之间通过CAN总线实现通信,多机实时、可靠控制。
2软件设计
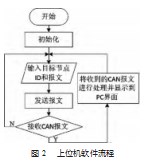
上位机的软件流程如图2所示,是使用Win⁃dowsvisualstudio2010开发的,其作用为通过CAN通信设备连接CAN总线,和挂在CAN总线上的各节点通信。上位机在工作时会定时向每个节点的电源模块轮流发送命令,让每个节点向它回复报文,同时上位机接收来自各个节点的实时报文并解析成电压电流信息以及故障报文,然后在人机交互界面显示,方便对电源系统的实时监测。尤其是当电源系统运行异常时,可使用上位机监控各节点,将接收到的电压电流实时数据及故障类型显示出来,从而辅助技术人员对故障定位和排除。
在电源中,往往因为各分立器件的误差,电源模块的各种参数需要进行调节,比如调整电源模块的保护动作点,电源的输出电压值等,传统的硬件系统如果调节需要逐台调整其对应功能的电阻电容,工作量巨大且繁琐,还容易出错。而本系统则可以通过上位机调整每台电源的参数,将调试工作大大简化。上位机可以直接将电源模块的各个参数发送给总线上的每个电源,然后再根据每个节点电源回复给上位机的具体电压电流信息微调参数,最终调整好总线上每台电源的具体参数。
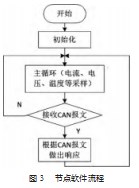
各节点的软件流程如图3所示,节点的主要功能是对电压、电流、温度等物理量进行循环采样,并根据采样值判断状态是否正常,如果不正常,则判断发生了什么故障,并将对应的状态位标记。每个节点都有一个唯一的ID,不同ID则是根据硬件来区分的,每个电源模块设置四个电阻来组成ID序列,各节点初始化时会根据不同的电阻排列方式实现每个电源模块的不同ID。当上位机对某个节点发来命令要求其上报报文时,该节点会响应上位机的命令,发送目前的状态及故障位信息。当某个节点的电源模块收到上位机的发送实时数据命令时,会将相关的电压电流信息以500 ms的时间间隔不停地向上位机发送,同时,能够根据上位机发来的参数更改自己的参数,当收到上位机的查询参数命令时也能将自己目前的参数信息打包发给上位机。
3硬件设计
系统的微控制器电路芯片使用基于Cortex-M3内核的32位单片机STM32F103ZET6,该单片机的时钟频率高达72 MHz,具备11个定时器;支持嵌套矢量中断控制器(NVIC),可以实现极短的中断处理延迟,能最大限度减少进入中断时系统的资源占用量,进一步提高处理中断的速度;支持外部中断/事件控制器(EXTI),对应的边沿检测器可实现输入信号的上升沿、下降沿监测[10]。
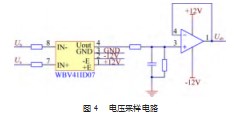
电压检测电路如图4所示,主要借助电压传感器WBV411D07将输入的交流强电转变为弱电信号,由于检测到的电压信号中存在一定的纹波电压,所以需要对该电压信号进行滤波处理,在本文中我们使用RC电路来进行滤波同时考虑到需要隔离前级采样电路对后级电路的影响所以设计了电压跟随器。
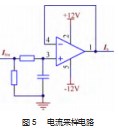
电流检测电路如图5所示,主要是借助电流霍尔传感器SP3实时测量系统电路中的电流,霍尔传感器输出的信号经过RC滤波电路传输给电压跟随器,跟随器防止了前级电路对后级产生影响,电流互感器选择的是LEM公司的SP3,该互感器性能优越。
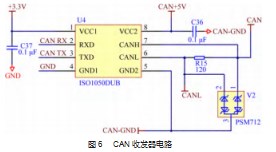
CAN收发器使用的是ISO1050,作为CAN收发器,该器件可为总线和CAN控制器分别提供差分发射能力和差分接收能力,信号传输速率高达1兆位每秒(Mb/s)。该器件尤其适合工作在恶劣环境下,性能强大,其具有串线、过压和接地损耗保护(-27~40 V)以及过热关断功能,共模电压范围为-12~12 V[11-12]。
此外,为了区分每个电源模块的地址,电路里设计了4个电阻位,这些电阻位上拉至3.3 V,若不焊电阻,则IO口输入为高电平,若焊接电阻,则IO口输入为低电平。这样,4个电阻位总共可以表示16种ID,即可以区分16个电源模块。
4效果验证
使用此系统之前调试时需先将设备加电,然后手持三用表、钳流表去测量母线和输出的电压电流,然后再让设备断电,使用烙铁调换相应的元器件,从而使电源的输出电压值和均流等指标满足要求。这种传统的调试方法往往需要反复加电断电以及使用烙铁焊接数次才能调好一台电源,效率低且麻烦。当使用此系统后,只需要加电后通过上位机就可以调节参数,无需断电和使用烙铁,效率高且操作更简单。
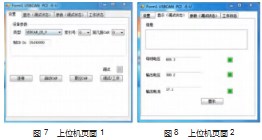
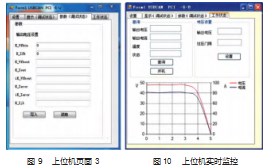
为了验证系统的可靠性及及实时性,通过CAN通信设备连接各节点在上位机上测试,如图所示为上位机界面,图7~9显示了上位机的3个页面,图7在界面上可以选择发送报文的ID,选择调试模式还是工作模式及连接CAN,通过在图7界面的操作可以选定所需控制的电源模块和控制模式;图8和图9分别是调试状态下监控电压电流值以及读取和写入参数的功能,当图8显示出的电压电流值不满足指标时,可由图9界面写入新的参数,再从图8界面观察更改参数后的新的电压电流值是否满足指标要求,若不满足可继续按此方法更改。
包含多个电源模块的系统工作时,如果某个模块运行不正常,一般需要外接示波器才能监测到输出电压电流的波形,从而判断电源出了何种故障。用了此通信系统,可由上位机监控其输出电压电流,从而能够辅助判断哪个模块出了何种故障,如图10所示,当正在工作的电源突然断电时,上位机能够显示出输出电压和电流的波形变化,直观显示电源的工作状态。
5结束语
实验结果显示,该系统能够由软件更改参数,使得调试更加有效率,系统通信正常、工作可靠,实现了CAN总线多个节点在上位机环境下实时通信的功能,该系统可以实时地接收各电源模块发来的电压电流信息并在PC上显示其数值和波形。本系统可以作为应对多机主从控制的选择,整机具有扩展方便、工作可靠、运行灵活等优点,克服了目前传统调试方法效率低且麻烦的问题,提高了多机通信的实时性和可靠性。
参考文献:
[1]张河新,王晓辉,黄晓东.基于STM32和CAN总线的智能数据采集节点设计[J].化工自动化及仪表,2012,39(1):78-80.
[2]孟强,徐慧,万青苗.基于STM32的数据采集及显示系统的设计[J].电脑知识与技术,2013,9(13):3183-3186.
[3]廖向阳,余剑武,张诗语,等.基于CAN总线的汽车实时数据采集与可视化研究[J].电子元器件与信息技术,2021,5(5):48-51.
[4]李蛟龙,任子真.基于STM32的CAN总线数据采集卡设计[J].沈阳化工大学学报,2020,34(1):79-84.
[5]吴根平,王浩,刘巍,等.基于STM32的CAN总线智能测控模块的设计[J].舰船电子工程,2020,40(1):117-120.
[6]吴艳,吴伟豪,乐志文,等.基于STM32的无线手持点菜系统的设计[J].广西工学院学报,2013,24(4)62-65.
[7]张强.基于CAN总线技术的船舶电子通信系统设计与常见故障分析[J].电子技术与软件工程,2022(3):29-33.
[8]马丹丹,张文超.基于CAN总线和STM32的智能步进电机驱动模块设计[J].生命科学仪器,2012(10):43-47.
[9]丁力,宋志平,徐萌萌,等.基于STM32的嵌入式测控系统设计[J].中南大学学报,2013,44(S1):260-265.
[10]胡方猛,王尧.基于STM32F103ZET6的红外遥控盒设计[J].电子产品世界,2021,28(10):44-47.
[11]王英志,杨佳,韩太林.基于STM32的RS232-CAN通信协议转换器设计[J].制造业自动化,2013,35(14):141-143.
[12]《电子与电脑》编辑部.德州仪器推出业界首款可简化系统设计与布局的隔离式CAN收发器[J].电子与电脑,2009(8):68.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/50561.html