SCI论文(www.lunwensci.com):
摘要:为满足小型折叠翼无人机空中投放发射的需求,设计了一种无人机空中投放装置,由投放筒、制动伞、投放机构及控制单元组成。投放装置自载机释放后进行自由落体运动,投放筒通过尾翼将自身角度调整并保持至投放准备姿态。根据无人机巡航的速度范围,控制单元延时释放无人机锁定机构,确保无人机出筒后具备适合的巡航速度。首先根据折叠翼无人机空中投放特点,提出了一种空中投放的设计方案;利用CATIA对装置进行建模;使用CFX和ANSYS分别求解流场和结构响应,得到投放筒下落过程中不同攻角条件下的速度与姿态变化的离散结果;使用Matlab将离散值拟合为高阶多项式;通过在Adams设置边界条件,进行投放筒下落过程速度及姿态变化过程的运动仿真。仿真结果证明,设计的空中投放装置能够实现折叠翼无人机的空中投放。
关键词:折叠翼;无人机;空中投放;运动仿真
Design of Airdrop Mechanism for Folding-wing UAV
Hu Purui,Meng Chang,Li Chenwei,Chen Yafeng,Wang Yongheng
(CETC27,Zhengzhou 450005,China)
Abstract:In order to meet the needs of small folding-wing UAV for aerial launch,a UAV aerial launch device is designed.It consists of a launcher,a braking parachute,a launching mechanism and a control system.After theaerial device is released from the carrier,it performs free fall.The launcher enters and maintains a stable delivery posture.According to the cruising speed range of UAV,the control system delay release UAV to ensure that the UAV can enter the cruise state.According to the characteristics of the aerial launching,a design was proposed.By using CATIA,a three dimensional modeling of the device was built.The CFX and ANSYS were used to calculate the responses of flow field and structure.The discrete results of velocity and attitude caused by angle of attack were obtained.The discrete results were obtained by polynomial-fitting with MATLAB.The dynamics was analyzed with ADAMS.The simulation results show that the designed aerial launching device can realize the aerial launching of folding wing UAV.
Key words:folding-wing;UAV;aerial launch;motion simulation
0引言
近年来,折叠翼无人机的重要军事价值在乌俄战争以及伊拉克、阿富汗等地区的军事冲突中得到了充分的体现。以美军“弹簧刀”、“郊狼”系列、以色列“英雄”系列为代表[1-3],折叠翼无人机在储存状态下可将机翼折叠收纳于发射筒中,在出筒瞬间机翼展开,飞抵目标上空后,依照相应策略执行侦查或打击任务[4]。小型折叠翼无人机由于机体尺寸的限制,往往采用锂离子电池驱动,搭配直流无刷电机及螺旋桨为无人机提供动力,由于现阶段电池容量密度的约束,造成折叠翼无人机航程有限[5-6];受到机体尺寸及散热等条件的约束,使得折叠翼无人机无法搭载大功率电台及链路,造成其控制半径及航程受限。应用折叠翼无人机空中投放技术可弥补其该方面的缺陷。首先,载机可装载折叠翼无人机飞至指定区域进行投放,实现快速远程部署,弥补了折叠翼无人机续航能力的不足;同时,投放载机可充分发挥其载荷能力搭载大功率通信设备,作为投放子机的通讯中继,扩大了折叠翼无人机侦查及打击的范围;最后,采用空中投放方式起飞,对折叠翼无人机机体抗过载能力要求较低,可有效降低机体的重量占比,提高其有效载荷能力[7]。
本文根据某小型折叠翼无人机的特点及起飞速度要求,设计了一种可用于小型折叠翼无人机的空中投放装置,采用投放筒及制动伞的方式实现无人机的投放,对制动伞及关键承力组件进行了分析;通过设计一种小型延时控制单元来实现无人机对发射初速的要求;之后根据投放过程中投放机构可能出现姿态进行有限元分析,并借助Matlab软件将分析结果进行拟合;最后,利用Adams软件进行动力学仿真,验证了方案的可行性。飞行试验表明,该空中投放装置能够实现折叠翼无人机的空中投放功能。
1折叠翼无人机空中投放装置工作流程
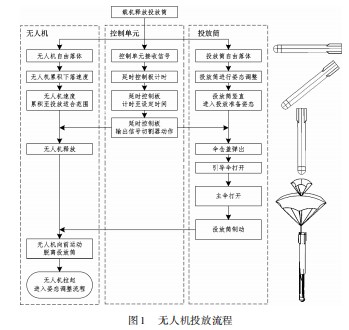
如图1所示,载机到达目标区域后,将装有折叠翼无人机的投放装置抛出,投放装置进行自由落体运动;与此同时,控制单元检测到载机投放动作后启动计时;投放装置下落过程中,在重力作用下进行垂向加速,同时逐渐低头倾转;当投放装置下落至设定时间T时,无人机已满足投放速度且进入竖直投放准备姿态;控制单元释放锁定装置,无人机获得垂向的移动自由度,同时伞仓盖及引导伞在锁定装置内部弹性元件作用下向投放筒后方弹出,引导伞在气动力作用下张开,进而牵出主制动伞;主制动伞张开后使投放筒制动,无人机向前运动脱离投放筒,机翼展开进入拉起流程。
2结构组成
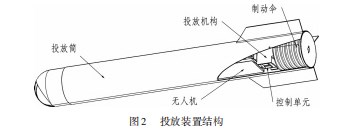
该空中投放装置由投放筒、投放机构、制动伞及控制单元组成,如图2所示。
2.1投放筒
投放筒作为折叠翼无人机的收纳装置,携行及运输时为无人机提供保护,同时在投放装置自由落体段为机翼提供约束,避免在速度未积累到投放速度前机翼展开导致失速。
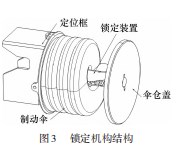
由于空中投放方式速度累积依靠重力作用,因此投放筒没有抗高过载要求,加工时可选用低介电常数的D玻璃纤维,该种玻璃纤维机械强度不及常用的E玻璃纤维,但其对筒内无人机的GPS及链路信号影响较小[8-9];芳纶虽具有优异的介电常数及拉伸强度,但成本较高。如表1所示。
投放筒前端延伸至机身,使机头外露,该种布置策略可在下落过程中对头部空气来流进行整流;投放筒尾部周向均布4片尾翼,用于投放筒下落过程中提供额外低头力矩,使无人机尽快进入并稳定在出筒准备姿态。
2.2投放机构
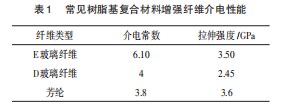
投放机构占据投放筒尾部位置,实现无人机自载机投放后的延时出筒展开,主要由锁定装置、制动伞、定位框及伞仓盖组成,如图3所示。
2.2.1锁定装置
锁定装置作为核心组件轴向贯穿整个投放机构,将无人机及伞仓盖锁定,在控制单元发出释放信号时,锁定装置动作将无人机及伞仓盖同时释放。
2.2.2制动伞
制动伞分为主伞及引导伞,锁定装置释放时,伞仓盖向后弹出,牵引引导伞打开,引导伞充气后牵引主伞打开。主伞打开后,将制动力通过定位框传递给投放筒,使投放筒制动,无人机由于惯性力作用向前运动脱出投放筒。
制动伞开伞过程可分为如下几个阶段[10-11]:(1)引导伞出伞仓直至伞绳拉直;(2)引导伞充气打开阶段;
(3)主伞出伞仓直至伞绳拉直;(4)主伞充气打开阶段;
(5)无人机脱出投放装置;(6)投放装置匀速下落阶段。
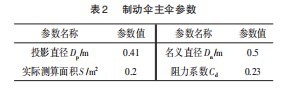
为简化计算,仅考虑主伞完全打开后对投放装置的制动作用。因此,主伞提供给投放筒的制动力应能够克服无人机机身、机翼与投放筒内壁之间的摩擦力。根据试验测量得到无人机与投放筒内壁产生的最大静摩擦力F不大于20 N。
制动伞主伞参数如表2所示。
该无人机常规释放速度为vr=30 m/s,制动伞主伞完全打开时,根据主伞参数计算制动力为:
因此,制动伞满足设计要求。
2.2.3定位框
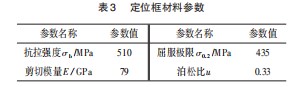
定位框采用7050铝合金加工,其材料参数如表3所示。
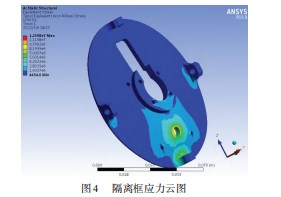
隔离框通过螺钉与投放筒固联,并将投放筒内部空间分隔为无人机仓及伞仓,同时为无人机提供尾部定位;制动伞主伞挂点穿过隔离框挂点孔将制动力传递给隔离框。将隔离框模型以中间格式导入ANSYS Workbench,施加安装孔固定约束及制动伞主伞挂点拉力,分析在主伞完全打开瞬间定位框的应力分布情况,如图4所示,由分析结果可知,定位框极限工况下最大应力值为σmax=12.6 MPa,其结构强度满足设计要求。
2.3控制单元
如图5所示,控制单元采用STC单片机最小系统架构,前端使用LM7805稳压器提供DC5V输出电压,外接直插式无源晶振同步时钟信号,协同单片机、复位电路及继电器触发无人机的投放动作[11-12]。
当投放装置处于挂载状态时,触点K2处于闭合状态,单片机接收端IN与GND连通处于低电平状态;当载机收到投放指令,挂载机构执行投放动作,此时常闭触点K2断开,单片机接收端IN在上拉电阻R3的作用下处于高电平;并在接收到上升沿信号后启动内部定时器;通过设置单片机内部计数寄存器[13],使其达到设定时间T后由输出端OUT输出低电平信号,继而三级管Q1导通,继电器SSR上电控制常开开关K3导通,释放无人机锁定装置,完成投放动作。
3无人机投放过程仿真
无人机投放过程是指装有折叠翼无人机的投放装置自载机投出,投放装置进行投放姿态调整、速度累积直至无人机释放机构动作的全过程。自载机投出后,由于无人机动力系统尚未启动,投放装置运动过程类似自由落体,除受到重力作用外,空气来流对投放筒外壁造成的气动力将对投放装置的速度及姿态造成影响。
为分析无人机投放过程各个时刻投放机构的速度及姿态变化情况,首先使用三维建模软件对投放装置外形建模,建立流场模型;并以中间格式导入ICEM CFD,设置边界条件及附面层参数,进行网格划分,将网格文件导入ANSYS CFX,通过设置边界条件可得到不同攻角下投放装置受到空气阻力及倾转力矩的离散结果,利用MATLAB函数拟合工具将离散结果拟合为投放装置来流攻角及速度的函数。使用Adams建立投放装置动力学模型,施加边界条件,通过迭代最终可得到无人机投放过程终点的位姿及速度结果。
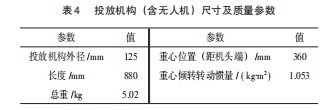
以某型折叠翼无人机为例,填装无人机后投放装置的尺寸及重量参数如表4所示。
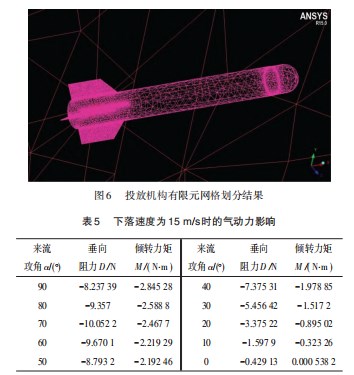
建立流场模型,通过.stp格式导入ICEM CFD,建立网格划分结果如图6所示。
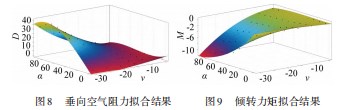
将建立得到的网格文件导入ICEM CFD,通过设置不同来流角度及流速等边界条件,可得到投放机构下落过程中不同姿态角及速度下受到的垂向空气阻力及投放机构倾转力矩;表5所示为下落速度为15 m/s时投放机构的受力情况;通过定义圆柱体旋转流场,设置不同的流速可得到投放机构在不同角速度倾转条件下的空气阻力矩。倾转角速度为2 rad/s时投放机构表面压力云图如图7所示。
将不同来流攻角及下落速度下得到的垂向阻力及倾转力矩的离散值导入MATLAB,运用最小二乘法建立一个新的函数模型逼近样本点进行曲线拟合[14-15]。一般来说,虽然采用较高的多项式最高幂次将使得拟合曲线与试验点数值更为接近,但次数过高或造成试验点以外及插值区间边缘的数据偏差增大[16]。低速流体中来流阻力往往与速度的平方成正比[17],同时考虑到计算经济性,将速度的最高次幂设置为2,来流攻角的最高次幂设置为3,拟合结果如式(1)及(2)所示:

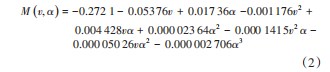
式中:D为投放机构受到的垂向阻力;M为投放机构受到的倾转力矩;v为投放机构的下落速度;α为投放机构的来流攻角。
垂向阻力与倾转力矩的拟合结果及曲面如图8及图9所示。
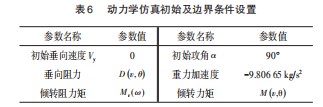
将得到的垂向阻力D(v,α)、倾转力矩M(v,α)及倾转阻力矩Mr(ω)拟合结果引入Adams,设置初始及边界条件,如表6所示。
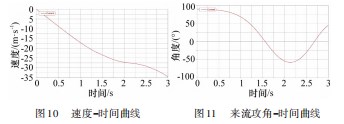
通过仿真,可得到投放机构姿态角与下落速度的变化曲线。如图10和图11所示。
由仿真结果可以得到以下结论。
(1)由速度-时间曲线可以看出,投放装置下落过程中,随着来流攻角逐渐变小,空气阻力随投放装置迎风面积减小随之减小,在图中反应为速度曲线斜率逐渐增大。由分析结果可知,投放装置垂向速度在t=3.6 s左右达到30 m/s,完成速度累积。
(2)由来流攻角-时间曲线可以看出,随下落速度逐渐增加,投放装置受到的低头倾转力矩逐渐增大,在图中反应为来流攻角曲线斜率减小并加速向零攻角靠拢;随投放装置倾转角速度增加,倾转阻力矩对投放装置倾转减速作用逐渐显现,在图中表现为投放机构来流攻角接近0°时攻角曲线随时间斜率逐渐平缓,在投放机构首次计入竖直姿态后,其自身倾转角速度将投放机构继续向负攻角方向倾转,但在倾转阻力矩的制动作用下,投放装置角度逐渐稳定到竖直投放准备姿态。从图中可以看到,t=3.6 s时,投放装置姿态基本稳定。
4结束语
本文针对小型折叠翼无人机机翼可折叠的特点,结合其发射起飞的速度要求的特征,设计了一种新型的折叠翼无人机空中投放装置,该装置可实现折叠翼无人机的空中投放。利用CATIA进行对该装置进行建模,说明其工作原理;并通过有限元分析其投放过程的受力情况,进行多项式拟合;最后通过Adams进行对投放过程进行了动力学仿真。仿真结果证明,该空中投放装置能够实现折叠翼无人机的空中投放。
该装置设计原理科学可行,锁定机构简单可靠,无人机与制动伞使用同一机构实现锁定和释放,避免了多重锁定机构单方面故障或释放不同步造成的投放隐患;控制单元使用独立的控制系统与电源供电,与无人机不产生交联,不需设置投放装置与无人机接口,避免了投放筒生产过程中筒内埋线等复杂生产工艺,实现投放装置生产成本最小化;投放筒在回收过程中由制动伞进行减速,避免了触地时造成的投放筒及投放装置损坏,重复使用率高。目前该中空投放机构已在国内某型无人机(3.5 kg级)上通过投放验证。通过改变投放筒及制动伞的参数,可将该装置应用于其他型号的折叠翼无人机,具有较好的推广价值和广阔的应用前景。
参考文献:
[1]杨清亮,杨光,万华翔.巡飞弹对空防作战的影响及对抗技术研究[J].飞航导弹,2021(12):12-16.
[2]姜俊新.无人机蜂群对防空作战的威胁与对策[J].国防科技,2019(6):108-113.
[3]张建生.国外巡飞弹发展概述[J].飞航导弹,2015(6):19-26.
[4]郝峰.多巡飞弹侦察/打击/评估一体协同方案设计[J].火力与指挥控制,2019(12):1-5.
[5]吴超,袁先士,薛劲光,等.小型巡飞弹电动推进系统设计及试验验证[J].航空动力学报,2021,36(1):88-96.
[6]焦玉坤,赵长辉,杨光.小型锂电池电动无人机的研制[C]//2014第五届中国无人机大会,2014.
[7]周前进,胡学峰,胡浩,等.一种可在高空投放的低成本小型无人机技术研究[J].兵器装备工程学报,2022(4):1-6.
[8]高爱君,刘文翰,蒋亚锋.树脂基透波复合材料在5G天线罩中的应用分析[J].化工新型材料,2021(7):190-193.
[9]李义全,王继艳,王海龙.高频透波玻璃钢天线罩性能的研究[J].玻璃钢复合材料,2011(3):42-44.
[10]包进进,雷江利,贾贺.伞包拉出过程仿真及载荷影响分析[J].航天返回与遥感,2017(6):31-41.
[11]郭亮,张红英,童明波.无人机伞回收动力学分析[J].南京航空航天大学学报,2012(2):14-19.
[12]张江印.51系列单片机软件延时计算方法[J].电脑编程技巧与维护,2011(8):82-84.
[13]张晓芳,刘瑞涛.C51单片机系统设计与应用简明教程[M].北京:化学工业出版社,2015.
[14]李柏年,吴礼斌.Matlab数据分析方法[M].北京:机械出版社,2012.
[15]贾小勇,徐传胜,白欣.最小二乘法的创立及其思想方法[J].西北大学学报,2006,36(3):507-511.
[16]DAVID KINCAID,WARD CHENEY.数值分析[M].北京:机械工业出版社,2005.
[17]刘扬正,钱仰德.测定不同形状物体空气阻力系数的实验[J].2017,36(3):16-19.
[18]刘鹤年,刘京.流体力学[M].北京:中国建筑工业出版社,2016.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/48286.html