SCI论文(www.lunwensci.com)
摘 要 :传统人工喷洒存在劳动强度大、效率低、喷洒效果不佳等诸多问题。针对此类问题,设计了一款集成感知、定 位、路径规划与导航、通信与数据传输等功能的智能小车,并通过多传感器融合、GPS 实时定位、智能路径规划等技术实现精 确喷洒、高效作业、智能监测和环境保护。该设计有效解决了农药喷洒领域的现存问题,提高了农药喷洒的效率、效果和环保 水平,为农业现代化提供了有力支持。
关键词 :智能车辆,路径规划,多传感器融合,农药喷洒
Intelligent Spraying Trolley Design Based on IoT Technology
WANG Li, ZHANG Zijian, XU Hanxiang, CAO Pengfei, HE Yiming
(School of Automotive and Transportation Engineering, Wuhan University of Science and Technology,
Wuhan Hubei 430000)
【Abstract】:To address the problems of high labor intensity, low efficiency, and poor spraying effect in traditional manual spraying, a smart car integrating perception, localization, path planning and navigation, and communication and data transmission functions was designed. By using multi-sensor fusion, real-time GPS positioning, and intelligent path planning technologies, this design achieves accurate spraying, efficient operations, smart monitoring, and environmental protection. This design effectively solves the existing problems in the field of pesticide spraying, improves the efficiency, effectiveness, and environmental protection level of pesticide spraying, and provides strong support for the modernization of agriculture.
【Key words】:smart car;path planning;multi-sensor fusion;pesticide spraying
0引言:
在科技日新月异的今天,物联网技术的发展为农业 自动化带来了前所未有的机遇。利用物联网技术,实现 对农业生产过程的全面监控与智能控制 [1],从而提高生 产效率,降低人力成本,保证农产品的质量与安全。国 内外学者,对智能小车在各领域的应用已经做了大量研 究。吴岳峰等 [2] 设计了一种智能物流搬运小车,利用 OpenMV 进行图像识别,实现了高精度、低成本的物 流搬运效果。冯保壮等 [3] 提出并设计了一种基于动态地 图的智能巡航小车系统,通过 UWB 定位技术在系统布 设区域建立位置坐标系,实现了小车的定轨巡航。胡立君等 [4] 进行了基于物联网技术的快捷收盘小车的探索, 充分利用 ZigBee 技术实现精确定位、快捷收盘。本文 提出了一种基于物联网技术的智能喷洒小车,集中创新 多传感器融合、车辆循迹与定位、云平台构建,旨在针 对性解决传统喷洒作业中的问题,提高喷洒效率、保护 环境,实现绿色农业,为农业现代化建设提供有力支持。
1 机械结构设计
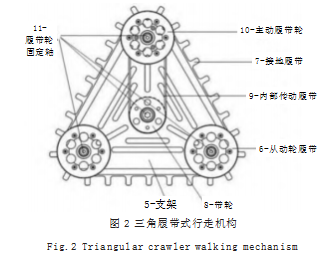
车身模块包括底板、上端盖、永磁同步电机、双同 步带轮、内轴同步带、齿轮固定装置、变速箱箱体、从 动齿轮、中间轴齿轮、中间轴、外轴、外轴齿轮、单 同步带轮和内轴 [5],外观展示图如图 1 所示。整体大部分材料采用合金材料,鉴于该小车主要工作于农田、野 外等泥土、水分较多的环境,所以车身结构中用到的轴 承均带有防尘盖,并在装配过程中的缝隙处涂抹防水硅 胶,提高小车的防尘与防水效果,进一步提高小车应用 的广泛性以及小车的实用性。三角履带机构的主要优势是在复杂地形和障碍物上 具有良好的驱动性能(如图 2 所示)。当智能小车需要越 过沟壑、爬坡或越过草地等障碍物时,三角履带机构能 够提供足够的驱动力,使智能小车平稳地通过这些地形。 相同重量的履带的牵引力是轮式的 1.4 ~ 1.8 倍,牵引效 率方面,轮式最大牵引效率是 55% ~ 65%,履带可达 70% ~ 80%[7]。
三角履带机构的维护成本相对较低。由于其采用了 耐磨的金属履带和橡胶衬里,因此在正常使用情况下, 小车的三角履带机构磨损较小,维护成本相对较低。
2 物联网技术在智能小车上的实现
2.1 感知层
智能喷洒小车搭载多种传感器,如摄像头、超声波 测距仪、温度湿度传感器,实时采集环境信息。设计关 键环节包括传感器选择与融合及定位与地图构建 [6]。传 感器融合 [7] 方面,融合激光雷达和视觉传感器数据提高
目标检测和识别准确性 ;融合超声波传感器 [8] 和视觉传 感器数据提高检测和避障性能 ;融合轮速传感器与其他 传感器数据实现精确控制行驶速度和方向。定位与地图 构建部分,智能喷洒小车利用全球定位系统(GPS)实 现精确定位 [9] ;视觉里程计通过摄像头捕捉的图像信息 实现实时运动轨迹追踪 ;激光雷达里程计结合激光雷达 和摄像头捕捉的图像信息实现实时运动轨迹追踪。
综合上述各传感器数据,进行数据预处理,利用 A* 算法进行路径规划,具体步骤如下 :
(1)初始化起点和终点 :将实际环境中的车位置和 障碍物位置映射到网格地图中,确定起点和终点在网格 地图中的位置。网格行数为 :row = round(y / grid_ size), 网格列数为 :col = round(x / grid_size)。
(2)构建开放列表和封闭列表 :开放列表用于存储 待探索的网格,封闭列表用于存储已探索的网格。
计算相邻网格 :从当前网格遍历所有相邻网格。
网格左上 :(row - 1. col - 1) 网格上 :(row - 1. col)
网格右上 :(row - 1. col + 1) 网格左 :(row, col - 1)
网格右 :(row, col + 1) 网格左下 :(row + 1. col - 1)
网格下 :(row + 1. col) 网格右下 :(row + 1. col + 1)
(3)计算启发式函数 :为每个网格计算一个启发式 函数值,表示从起点到该网格的最短路径估计值。
从起点 (s_row,s_col) 到目标点 (t_row,t_col) 的曼哈顿 距离表示如公式(1)所示 :
h(s,t)=abs(s_row-t_row)+abs(s_col-t_col) (1)
(4)寻找最佳路径 :从起点开始, 依次将相邻网格 添加到开放列表,计算每个相邻网格的代价(从起点到 相邻网格的实际代价加上启发式函数值), 并将代价最 小的网格作为当前网格。然后,将当前网格添加到封闭 列表,并从开放列表中移除。随后检查当前网格是否为 终点,如果是,则找到了最佳路径 ;否则,继续寻找下 一条代价最小的路径。
计算每个网格的代价 :
- 从起点 (s_row, s_col) 到当前网格 (cur_row, cur_ col) 的实际代价 :g(s, cur)
- 从起点 (s_row, s_col) 到当前网格 (cur_row, cur_ col) 的估计代价 :h(s, cur)
- 网格代价 :f(s, cur) = g(s, cur) + h(s, cur)
(5)生成最终路径 :从终点开始, 沿着封闭列表回 溯至起点,得到最终的无碰撞路径。
查找最小代价的网格,当前开放列表中的所有网 格,计算f(s,cur) 值,找到具有最小f(s,cur) 值的网格作 为当前网格。
(6)平滑处理 :对搜索到的路径进行平滑处理, 使 路径更平滑、连续。
(7)跟踪控制 :根据平滑处理后的路径,实时控制 小车的行驶速度和方向,使小车按照规划的路径行驶。
在智能喷洒小车的路径规划中, A* 算法是一种高 效、灵活的方法。通过优化算法参数和引入优化方法, 可以在保证路径规划精度的同时,降低计算复杂度,提 高搜索效率。A* 算法路径规划实验图如图 3 所示。
2.2 传输层
利用 LoRaWAN 技术实现智能喷洒小车与云端的通 信, 充分发挥其低功耗广域网(LPWAN)技术的优势, 具有长距离、低功耗、双向通信和自组织网络等特点, 如图 4 所示。
(1)确定网关的通信参数 :频率、功率、空中速率 ;
(2)部署 LoRaWAN 节点 :分配设备、应用 EUI, 应用程序密钥,将 EUI 与密钥绑定并生产节点密钥 ;
(3)配置 LoRaWAN 接入模块 :实现对智能喷洒 小车上传数据的接收和存储 ;
(4)建立自组织网络 :通过如公式 (2) 所示的来计 算合适的节点间距 :
d=n x c/2xπxR (2)
公式(2) 中, d 表示节点间距, n 表示网关数量, C 表示网络覆盖率, R 表示网关的覆盖半径。根据实际 需求调整节点间距,以确保网络覆盖率达到预期目标。
2.3 控制层
强化学习算法用于农药喷洒控制,其核心是使智能 小车在行驶过程中学会选择最佳的喷洒动作。在具体实 施过程中,采用深度神经网络来建立策略网络和价值函 数。以下是具体算法流程 :
(1)建立环境模型 :环境模型包括状态向量、动作向量和奖励向量。状态向量包括小车位置、速度、方 向、喷洒参数(如喷头高度、喷头角度等)以及环境信 息(如风速、气温等)。动作向量包括喷洒速度、喷洒 高度、喷洒角度等。奖励向量可根据任务目标和农药喷 洒质量来设计。
(2)构建策略网络 :设状态向量为 s_t,动作向量 为 a_t,则策略网络的目标是学习一个函数 :π(a_t|s_t)。 神经网络将状态向量 s_t 作为输入,输出各个动作 a_t 的概率分布。可以使用 Softmax 函数将输出转换为概 率分布如式(3)所示 :
π(a_t|s_t)=softmax(W^T*s_t+b) (3)
公式(3) 中, W 和 b 分别是神经网络的权重和偏 置, * 表示矩阵乘法。
(3)构建价值函数 :设状态向量为 s_t,动作向量 为 a_t,奖励为 r_t,下一个状态为 s_t+1.则价值函数 的目标是学习一个函数 :V(s_t)。神经网络将状态向量 s_t 作为输入,输出该状态下累积奖励的期望值。价值 函数的损失函数可以定义为如式(4)所示 :
L=(r_t+γ* max_a Q(s_t+1. a) - V(s_t))^2 (4)
公式(4) 中, γ 是折扣因子, Q(s_t+1.a) 是下一个 状态的价值函数。通过梯度下降法优化损失函数,得到 价值函数的参数。
(4)训练强化学习算法 :在训练过程中,我们使用强 化学习算法来优化策略网络和价值函数,具体流程如下 :
1)初始化策略网络和价值函数的参数 ;
2)智能小车行驶过程中,根据当前状态 s_t,使用 策略网络选择动作 a_t ;
3)执行动作 a_t,得到奖励 r_t 和下一个状态 s_t+1 ;
4)使用价值函数评估当前状态的价值 V(s_t);
5)将 (s_t,a_t,r_t,s_t+1)存储到经验回放缓冲区 ;
6)从经验回放缓冲区随机抽取一批数据,用于更 新策略网络和价值函数的参数 ;
7)重复步骤 2)至 6),直到策略网络和价值函数的性能满足要求。
(5)整合策略网络和价值函数 :在实际应用中, 智 能小车的控制系统需要同时考虑策略网络和价值函数的 输出。可以使用如公式(5)所示的来综合这两个网络 的输出,以确定最终的喷洒动作 :
a_t=argmax_a π(a_t|s_t) * Q(s_t, a_t) (5)
公式(5) 中, argmax_a 表示在动作空间中选取使 得 Q(s_t, a_t) 最大的动作。
通过上述算法,可实现农药喷洒智能小车在行驶过 程中的自主决策,以达到高效、精确的农药喷洒效果。
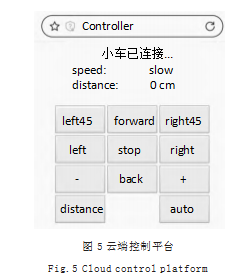
3 基于 AWS 云平台的 Web 应用
AWS 提供了丰富的云服务和强大的基础设施,可 满足智能喷洒小车实时监控系统的需求,云端控制平台 如图 5 所示。以下是相关步骤 :
(1)安装 Django 和必要依赖 :在 EC2 实例上安装 Django 和 uWSGI 服务器 ;
(2) 创建 Django 项目和应用 :使用 Django 创建 名为 my_project 的项目和一个名为 my_app 的应用 ;
(3) 配置 Nginx 反向代理 :在 EC2 实例上安装 Nginx, 并编辑 Nginx 配置文件(通常位于 /etc/nginx/ sites-available/ default);
(4)配置 uWSGI 服务器 :在 EC2 实例上创建一个 uWSGI 配置文件(/etc/uwsgi/my_project.ini);
(5)配置 S3 存储桶 :在 AWS 管理控制台中创建 一 个 S3 存 储 桶(例 如 my-smart-sprayer-data)。 在 Django 项目中,使用 Boto3 库与 S3 存储桶进行交互。
(6) 部署 Django 应用 :将 Django 项目文件夹上 传到 EC2 实例,安装项目依赖并运行 uWSGI 服务器。
4 结论
本文研究的智能喷洒小车能够通过强化学习算法实 现精确的农药喷洒控制,有效降低农药浪费和环境污 染,并具备自动避障、循迹功能,能够在短时间内完成 大面积农田的农药喷洒任务。物联网技术在小车上的运 用进一步提高了农药喷洒的效率和环保水平,实现了农 药喷洒、农田环境的云端监测,为农业现代化提供了有 力支撑。虽本文研究取得了一定成果,但仍存在局限 性,今后研究方向将主要集中于降低数据收集和处理的成本,简化云平台的构建,优化传感器之间的信息融 合,持续更新和维护小车的软、硬件设施,逐步提高智 能小车的可靠性和稳定性。
参考文献
[1] 石峰,丁祎,闪慧月,等.基于物联网技术的智慧农业设计与实 现[J].网络安全技术与应用,2022(01):125-126.
[2] 吴岳峰,张海若,白雪松,等.智能物流搬运小车[J].电子测试, 2022.36(21):105-107.
[3] 冯保壮,龚元明,潘敬宇.基于动态地图的智能巡航小车设计 [J].农业装备与车辆工程,2022.60(8):124-129.
[4] 胡立君,林徐,孙立品,等.基于物联网技术的快捷收盘小车的 探索[J].电子商务,2019(2):59-60+87.
[5] 李成琪.机器人三角履带式行走机构及其控制研究[D].镇江: 江苏大学,2020.
[6] 李文峰.物联网感知层关键技术研究[D].成都:电子科技大 学,2017.
[7] 黄宇轩.面向协同搬运的跟随AGV多传感器融合技术研究 [D].南京:南京航空航天大学,2021.
[8] 陈远.基于超声波传感的障碍物检测和测距系统设计[D].成 都:电子科技大学,2019.
[9] 张世昂,付根平.农业智能巡检小车的设计[J].中国农机化学 报,2018.39(4):82-89.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/68331.html