SCI论文(www.lunwensci.com)
摘 要 :随着机器人技术的不断发展,机器人在工业自动化、医疗卫生和服务业等领域得到广泛应用。为满足机器人控制 系统对开放性、通用性和扩展性的要求,本文在 IEC61131-3 标准的基础上,使用 CODESYS 软件开发环境设计了一种机器人 开放式运动控制系统,该系统能够实现机器人的正逆运动学求解、插补运动等功能,并设计了可视化界面进行操作。此外,还 使用 UG MCD 模块进行了 UR5 机器人控制仿真,通过观察仿真过程中机器人的运行状态,验证了机器人控制系统的有效性。 实验结果表明,该机器人控制系统运行稳定,具有良好的应用前景和广泛的适用性。
关键词:机器人,CODESYS,运动学,控制系统
Design of Robot Control System Based on CODESYS
WANG Chengtao1. ZHANG Peng1. WANG Bin2. ZHANG Han1. ZHANG Xinduo1
(1. School of Mechanical and Electric Engineering, Shandong Jianzhu University, Ji'nan Shandong 250101;
2.Jiaozhou Market Supervision Administration Bureau, Qingdao Shandong 266300)
【Abstract】:With the continuous development of robot technology, robots are widely used in industrial automation, health care and service industries. In order to meet the requirements of openness, versatility and expansibility of robot control system, this paper designs a robot open motion control system based on IEC61131-3 standard and CODESYS software development environment. The system can realize the functions of forward and inverse kinematics solution, interpolation motion and so on, and designs a visual interface to operate. In addition, the UG MCD module is used to simulate the UR5 robot control. By observing the running state of the robot in the simulation process, the effectiveness of the robot control system is verified . The experimental results show that the robot control system runs stably and has good application prospects and wide applicability.
【Key words】:robot;CODESYS;kinematics;control system
引言
随着机器人技术的不断进步和广泛应用,机器人运 动控制技术也面临着更高的要求 [1-3]。为了满足不同加 工工艺的需求、降低生产成本、缩短研发周期以及扩大 应用范围,机器人控制系统需要更好的开放性、通用性 和扩展性。然而,目前机器人控制系统通常采用专用的 控制器,且缺乏统一的编程语言,这种封闭式的控制系 统在应用时会受到各种软硬件平台的限制,影响了机器 人控制系统的研发和使用效率。因此,为了满足现代化 的需求,需要开发更加开放、灵活、可扩展的机器人控制系统,并保证机器人运动控制的精度和效率,促进机 器人技术的进一步发展和应用 [4.5]。在相关文献中,有 研究者使用基于 IEC61131-3 标准的 PLCopen 轴组功 能块实现了多组协调运动控制,但未进行可视化界面设 计,也有研究者使用 CODESYS 自带的功能块开发了一 款机器人运动控制器,该控制器仅适用于六自由度工业 机器人,并不适用于协作机器人 [6.7]。
针对上述问题,本文以 IEC61131-3 标准为基础 [8], 运用结构化文本 ST 语言,开发了六轴机器人通用型控 制系统,包括正逆运动学求解和插补运动程序,并将运动学正解逆解程序封装成符合 PLCopen 标准的功能 块,同时开发了简单人机交互界面。
1 运动控制系统结构设计
本文采用德国 3S 公司开发的可编程控制系统开发平 台 CODESYS V3.5 SP19 作为开发环境,使用 CODESYS 软件自带的 ST 语言作为主要编程语言进行编程设计, 运动控制程序、机器人的正逆运动学求解和插补算法程 序均采用 ST 语言进行统一编程,其中关节私服的运动 控制调用符合 PLCopen 标准的使能 MC_Power 和位 置控制 SMC_ControlAxisByPos 功能块完成。人机交 互界面用于输入程序,并实时显示程序内部变量的数 值,通过观察这些变量的变化,可以直观地了解程序的 运动控制效果,变量通讯用于系统与机器人之间的通 讯,控制系统软件框架如图 1 所示。
2 机器人控制系统功能开发
2.1 机器人运动学功能块设计
CODESYS 软件本身的 Robotics 库自带有六轴机 器人的正解逆解功能块,但是六轴机器人的 DH 参数 模型被限制,仅适用于常见的六自由度工业机器人,其 DH 参数只有 d1、d3、d4、d5、a1、a2、a3 可以设置, 并且第四轴的方向确定,与协作机器人第四轴的位姿并 不相同。因此,本文开发了通用正解逆解函数程序,并 封装成功能块。
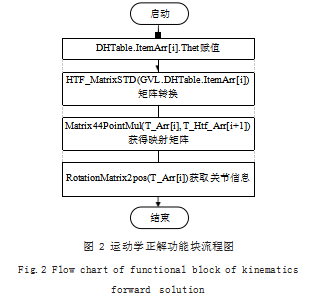
机器人运动学正解功能块的作用是通过机器人每个 关节的关节角度来确定末端执行器的位置和方向,运动 学正解程序的流程图如图 2 所示。
运动学正解程序中专门设计了正解所用的结构体 和运算函数。第一步输出机器人每个关节的关节角度, 把关节 1 的角度赋值给 DH 参数结构体数组 DHable. ItemArr[1] 的关节角 Thet,六个关节角依次类推,第 二步 DH 参数转齐次矩阵函数 HTF_MatrixSTD 会把输 入的关节角转换成齐次变换矩阵,第三步通过矩阵右乘 函数 Matrix44PointMul 把第二步所有的齐次矩阵以右 乘的方式相乘,得到运动学正解的结果 06T。本文在此 基础上增加了一步,第四步通过矩阵转位置信息函数RotationMatrix2pos 得到齐次矩阵所包含的各关节的位 置信息,封装后的运动学正解功能块如图 3 所示。输入引 脚包含每个关节的关节角度输入和功能块执行变量, 输出 引 脚 DirectKinematics_1..6 到 DirectKinematics_6 是 每个关节相对于基坐标系的位置信息。
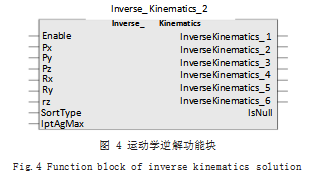
机器人运动学逆解功能块的作用是通过末端执行器 的位置和方向来确定机器人每个关节的关节角度,与运 动学正解功能块的作用正好相反,但更加复杂,求解时 存在奇异点的问题,封装后运动学逆解功能块如图 4 所 示。其中输入引脚除了目标点的位置和方向外,还有功 能块执行变量 enable、逆解奇异点决策要求 SortType 和插补角度间距允许值 IptAgMax,逆解奇异点决策要求 SortType 等于 1 时要求关节最大移动量不大于IptAgMax 设置值,等于 0 时要求总关节移动量最少, 以保证在不同的运动插补逆解时,不会出现奇异点 ;输 出引脚除了六个关节的关节角度还包括无解输出变量, 当目标位置无解时,IsNull 置 TRUE。
2.2 插补功能设计
直线插补功能块的作用是根据给定的起点和终点, 计算机器人末端执行器在运动过程中的位置、速度和加 速度等信息,实现机器人末端沿着一条直线路径移动。 直线插补运动控制功能流程图如图 5 所示。
首先是起始点和目标点的坐标赋值,调用 Inverse_ Kinematics 逆解功能块逆解,SortType 设置为 0 要求 关节移动量最少,判断是否有解,第二步,机器人末端 先移动到起始点,再根据距离和时长规划好加速、匀速 和减速三个阶段的参数,最后调用 Kinematics 正解检 查更新,并把每个关节的位置信息显示到人机界面,如 图 6 所示,末端轴的位置和 J6 的位置坐标跟所设置的 目标点参数一致。
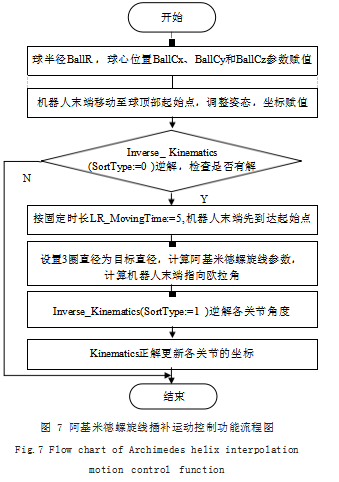
阿基米德螺旋线插补运动的目标是用阿基米德螺旋 线包住上半球,同时 J6 的 z 方向指向球心,其插补运 动控制功能流程图与直线插补类似,如图 7 所示。
3 仿真环境的搭建与实验验证
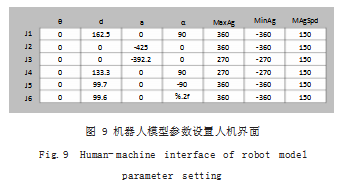
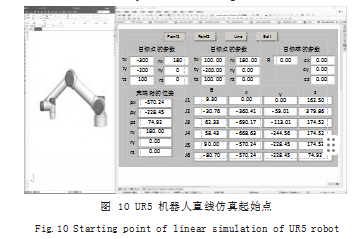
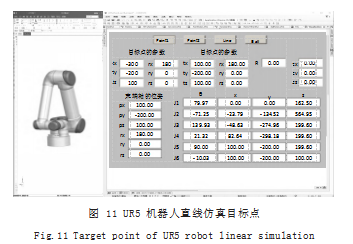
将上述机器人运动学功能和插补运动功能等程序使 用 ST 语言在 CODESYS 软件中编程实现。通过 OPC UA 与 UG MCD 模块建立通讯,搭建好仿真平台。上位机 利用 CODESYS 软件自带的驱动 CODESYS SoftMotion Win V3×64 版本 3.5.19.0 ;下位机通过 MCD 机电概念 设计建立刚体,配置基本机电对象、运动副和位置控制信号,再通过外部信号设置搜索 opc.tcp: 连接 CODESYS SoftMotion 驱动, 在 CODESYS 软件中通过符号配置 设置好要通讯的变量,通讯成功后 UG MCD 服务器信 息状态栏显示相连,如图 8 所示。以丹麦公司的经典机械人 UR5 为例,建立好通讯后, 在人机界面输入好机器人模型参数,如图 9 所示。点击 人机界面 Line 按钮,即可切换为直线插补功能,仿真 结果如图 10、图 11 所示。
通过使用 CODESYS 中数据跟踪插件可以观察运动 过程中机器人末端轴的相对于基坐标系的坐标变化以及 各轴速度变化,如图 12、图 13 可以看出,在直线插补 过程中,机器人末端轴的坐标变化曲线和机器人每个关 节速度变化曲线连续平滑,没有突变,且机器人没有明 显的抖动,可以平稳运行。
4 结论
本文根据机器人控制系统对开放性和扩展性的要求, 在 CODESYS 软件开发环境下, 基于 IEC61131-3 标准设计了一种机器人的通用型运动控制系统,通过 UG MCD 模块进行了 UR5 机器人联合仿真,实现了机 器人的正逆运动学求解以及插补运动功能,验证了机器人控制的有效性,所设计的机器人控制系统达到了设计 的目的,具有重要的应用价值。
参考文献
[1] BURKON A P,KRASILNIKYANTS E V.Design Principles for Motion Control System Software[J].Automation and Remote Control,2014.75(5):935-944.
[2] KOZLOWSKI K.Special Issue:Robot Motion and Control[J].Journal of Intelligent & Robotic Systems,2018. 93(3/4):617-619.
[3] PAN L,GAO T,XU F,et al.Enhanced Robust Motion Tracking Control for 6 Degree-of-freedom Industrial Assembly Robot with Disturbance[J].International Journal of Control,Automation and Systems,2018.16(2): 921-928.
[4] 陈梅,王舒润.基于PLCopen的电子凸轮功能块算法的研究 [J].控制工程,2020.27(1):121-126.
[5] 徐胜华,徐建明,赵帅.基于PLCopen的六轴工业机器人运动 控制功能块设计[J].计算机测量与控制,2019.27(3):97-102.
[6] 王夫康,张得礼,周伟.PLCopen轴组运动功能块的研究与实 现[J].机电工程,2016.33(12):1477-1482.
[7] 王耀东,徐建明,徐胜华.基于CODESYS平台的六自由度工 业机器人运动控制器设计[J].计算机测量与控制,2018.26(9): 103-107+125.
[8] 李飞江,李翔龙.基于IEC61131-3标准运动控制器的设计与 应用[J].组合机床与自动化加工技术,2019(3):17-19+23.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/65103.html