SCI论文(www.lunwensci.com):
摘要:针对普通智能绘图机器人不能实现在书写字体及绘图中不能快速的识别并和准确的将模型勾勒出来,同时在对于可以画出更快、更复杂、更精确而寻找更好的方法,提出了智能绘图机器人的原理,利用奎享雕刻后台控制GRBL-V2.5V主板进行控制42步进电机带动连杆机构从而拖动握笔装置进行书写,同时采用奎享雕刻来进行控制绘图机的书写、绘图系统。通过实物的制作及测试验证绘图、书写系统的可行性以及实用性。
关键词:智能绘图机器人;42步进电机;奎享雕刻;GRBL-V2.5V主板
Research and Design of an Intelligent Drawing Robot System
LIU Lei,LU Yongguang,CHEN Zida,CHEN Yuyang,LIN Zongde,LIN Xinying
(Minnan University of Science and Technology,Shishi Fujian 362700)
【Abstract】:In view ofthe common intelligent drawing robot can not realize the rapid recognition and the accurate outline of the model in the writing font and the drawing,at the same time,in order to draw faster,more complex,more accurate andfind a better way,proposed the principle of intelligent drawing robot,the 42 step motor is driven by the grbl-v2.5 v Motherboard to drive the connecting rod mechanism to drive the pen-holding device to write,and the writing and drawing system of the plotter is controlled by the Quexiang engraving.The feasibility and practicability of the drawing and writing system are verified by making and testing the real object.
【Key words】:intelligent drawing robot;42 stepping motor;kuihang carving;grbl-v2.5v main board
设计了一种两自由度写字机器人,可以很方便地完成书写绘画任务;可以把在计算机输入的文字通过控制算法和硬件电路用步进电机带动写字笔在纸面自动地描写出来;其中分为上位机和下位机进行控制,而上位机是采用计算机作为载体,运用GRBL-V2.5V主板和奎享后台作为从机;在上为机上输入图形或者文字而相应的程序可以将其转换为G代码,并且通过串口发送到下位机中,下位机可以控制实现圆形弧切补和直线插补算法,利用其输出信号可以控制步进电机实现前后运动;而步进电机是通过电子脉冲进行一一控制,每次发出一个信号步进电机会实现一步操作,从而很好实现了上位机对下位机进行精准的控制[1]。
1系统控制要求
整个系统是由五个互相垂直的丝杆组合而成,分别实现对于X、-X、Y、-Y、Z、-Z六个方向上的立体运动,完成有四台步进电机及一块GRBL-V2.5V主板驱动的控制下位机相应的运动,实现六轴直线插补和圆弧形插补算法,利用输出控制脉冲和方向电平控制步进电机前进或者后退,从而绘画出自己所需要的图形。
2上位机设计
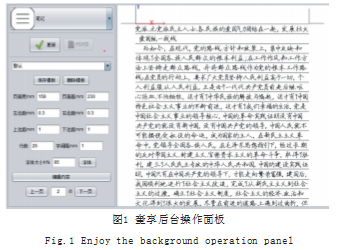
上位机主要采用计算机作为主机,采用GRBL-V2.5V主板加上奎享雕刻后台作为从机进行开发,用户可以根据自己所需要写的内容提前可以用word或者可以用Autocad绘图软件将其设计好,然后将其导入到上位机奎享后台如图1所示,而导入后该GRBL-V2.5V主板系统根据每一个字体或者图画上每个路径都记入相应的程序中。
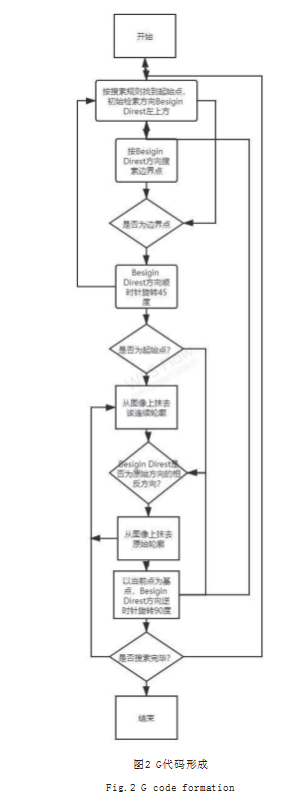
程序结束后会将原图中所有的汉字坐标以数组的形式按顺序储存起来,但是仅仅拥有这些坐标数据还不满足,还需要对这些坐标进一步处理后才能发送给下位机。而下位机将其所勾画的汉字或图案的内容自动转化为坐标形成的G代码指令,方便三轴平台的运作[2]。而我们所阐述的如何将汉字或者图案转化为G代码的原理如同将一个空白图片放大,而我们将看到的是白色的小方块,但是如果我们将其小方块进行染色将其观看出具有形状的小方块,因此我们的汉字或者图形就是根据汉字的每一个笔画或者图案的每一个线条都将其形成一个染色的方块便于后台程序快速识别,进而形成G代码指令如图2所示。
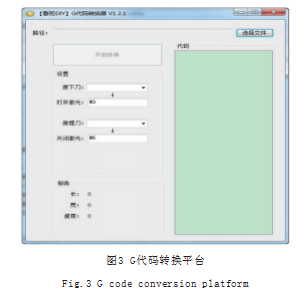
同时也可以采用其他的程序转换软件进行操作,只需将G代码黏贴到转换程序,而程序可以自动将G代码保留到相应的坐标点上,便于后面的操作如图3所示。而经过转换后的G代码会有程序传递到下位机,下位机将会根据其坐标位置进行移动和判断笔的每一步的动作,同时上位机和下位机二者存在着一个相互传递信息的状态,上位机会接受下位机的反馈,可以对加工速度以及书写字体的形状进行调控,也可以对现在的加工位置进行实时监控,避免出现偏差问题。
3下位机设计
3.1设计原理
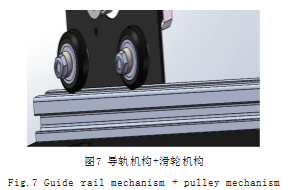
下位机组成结构:导轨机构+滑轮机构+步进电机装置+书写装置+电控装置设计的导轨机构可以根据每一次书写的长度不同进行相应的调控,结合滑轮机构可以在原来的滑杆机构上运用步进电机可以进行相应的走动变滑动为滚动提高涂鸦的效率,在导轨机构加上滑轮机构的基础上运用了书写涂鸦装置再加上后台相应的电控装置,随意进行调制相应自己所需要的图画以及文字进行相应的书写,根据绘图机的要求,该机电的应有的工艺过程及运动形式为:
3.2设计动作分解
(1)将导轨机构和滑轮机构先结合到一块,其运动轨迹如图4所示:
对这种运动要求运用导轨加上滑轮机构将其滑轮可以在导轨上可以随意移动,进而控制相应的落笔装置,同时还可以保证其每次落笔更加精确,从而保证每一次绘图的作品可以更加的美观。而采用滑轮机构而不采用滑杆机构主要是考虑到滑杆机构摩擦阻力比较大,而且还非常大,采用滑轮机构可以减小摩擦阻力并且其装置比较小巧。
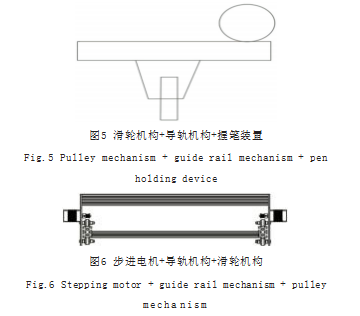
(2)滑轮结构在步进电机的传动下带动导轨机构从而传动到握笔装置进行相应的涂鸦,而握笔的一套装置如图5所示:
运用旁边的二个步进电机从而控制笔的前后移动,然后中间一个横梁也是采用相应的导轨机构加上滑轮机构加上步进电机从而控制其相应的左右移动的书写进而控制落笔装置的上下左右的移动书写,然后运用奎享雕刻进行控制GRBL-V2.5主板进行控制步进电机实现相应的绘图、书写。
(3)绘图机步进电机+导轨机构+滑轮机构如图6所示
4三轴平台程序设计
根据资料对比,在三轴平台上使用逐点比较法插补进行控制可以达到较好的效果,X轴、Y轴、Z轴共三个轴,组装于底座两端的Z轴运动系统,架设于所述底座中部的X轴运动系统,以及固定于轴运动系统上的Y轴运动系统,其中,所述X轴运动系统、Y轴运动系统以及乙轴运动系统分别包括步进电机及滑动装置,该滑动装置包括导轨和滑块[3];所述X轴运动系统还包括一横梁,所述用于驱动该轴运动系统的步进电机和所述导轨固定于该横梁上;所述Y轴运动系统还包括一固定架,所述用于驱动该Z轴运动系统的步进电机和所述导轨安装于所述固定架上。三轴运动平台不但可以提高系统运行平稳性和准确性,而且可以实现负载的高速、准确定位[4]。
5绘图机三维建模
5.1部分建模
(1)导轨机构+滑轮机构如图7所示:
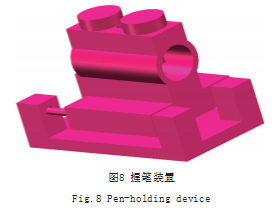
(2)握笔装置如图8所示:
5.2 装配体
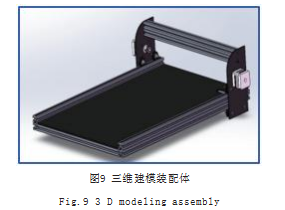
三维建模装配体展示如图 9 所示 :
6结语
本设计有效利用了、后台控制主板进而调控步进电机实现对绘图的精准控制的这一功能,主要有以下几个优点:
(1)采用奎享雕刻PC端,输入相应的所要勾画的图纸进而可以根据后台调出自己所需要的字体大小、字体样式、笔记本的排版样式(是否400字方格纸、数字横线格等)。
(2)利用奎享雕刻后台的传输给GRBL-V2.5V主板,而主板通过分析与综合将信息传输给四个42的步进电机控制其握笔装置进行X、-X、Y、-Y四个方向来进行随意调控。
(3)而握笔装置也是经过solidworks建模软件,进行相关建模然后通过机构仿真进行检验其握笔装置是否符合步进电机调控其行走稳定,以及在书写的过程中观察其书写的是否准确以及绘图是否美观。
参考文献
[1]陈玉敏,谢玮,孟宪民,等.智能写字机器人设计[J].自动化技术,2016(24):1.
[2]林春盛,潘锦豪,徐成烨,等.智能三轴写字机设计[J].自动化技术,2020(4):4.
[3]孙东明,张立中,白杨杨.基于三轴转台模型的速度扰动观测器设计[J].自动化技术,2019(42):2.
[4]刘磊,吴方琴,罗熠航,等.智能小火车的研究与设计[J].自动化技术,2021,11(2):2.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/37480.html