SCI论文(www.lunwensci.com)
摘 要:海洋经济的发展推动了现代海洋渔业、运输业的发展,随着海上航线的日益繁忙,海上航行安全问题则日益凸 显,而单一的航行数据不仅可靠性相对偏低,且需要进行二次处理和系统对比验证,以至于无法满足现阶段船舶航行安全的需 要。本文以计算机软件技术为支撑的信息融合机制为研究内容,提出 AIS、导航雷达数据融合方案, 从而为船舶航行安全提供 系统化保障。
关键词:计算机软件技术,AIS,雷达,信息融合
Research on Information Fusion Mechanism of AIS and Navigation Radar Based on Computer Software Technology
CHEN Liuzhou1. WANG Meiqin2. MA Zhuangzhuang3
(1 .CETC Rongwei Electronic Technology Co., Ltd., Chengdu Sichuan 611731; 2.Chongqing Ceprei Industrial Technology Research Institute Co., Ltd., Chongqing 401332;
3.Qingdao Virtual Reality Research Institute Co., Ltd., Qingdao Shandong 266000)
【Abstract】:The development of marine economy has promoted the development of modern marine fishery and transportation. With the increasingly busy sea routes, the safety of maritime navigation has become increasingly prominent, and the reliability of single navigation data is not only relatively low, but also needs to be carried out twice. Processing and system comparison and verification, so that it cannot meet the needs of ship navigation safety at this stage. This paper takes the information fusion mechanism supported by computer software technology as the research content, and proposes a data fusion scheme of AIS and navigation radar, so as to provide a systematic guarantee for the safety of ship navigation.
【Key words】: computer software technology;AIS;radar;information fusion
电子信息技术的发展与应用,改变了人们传统的生 产、生活方式,其中,以 AIS、导航雷达等为代表的信 息化船舶航行辅助设备在一定程度上提升了船舶航行安 全水平。然而,从实际使用效果来看, AIS 与导航雷达 数据来源单一问题导致目标信息无法匹配,这为船舶航 行带来了极大的安全隐患。通过创新 AIS 与导航雷达信 息融合机制,利用计算机软件技术实现对导航信息与目 标数据的智能融合,优化融合算法,为船舶航行方案的制定提供参考,保障船舶航行安全。
1 AIS 与导航雷达概述
船舶航行安全需要完善的保障机制得以实现,随着 第二次工业革命的开始,电子信息技术在船舶领域得到 了广泛应用,如 AIS、导航雷达的出现,并显著提升了 船舶航行的安全性。
1.1 AIS
基于船舶航行环境的特殊性,在与目标船只进行对
话时,仅能够通过无线通信系统来实现,因此,依托无 线通信信道实现船舶航行数据的双向传输也就成为可 能,这也是 AIS 的关键技术支撑。
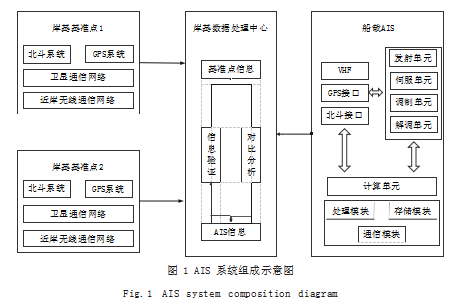
AIS 也被称为船舶自动识别系统,其系统组成如图 1 所示,其能够通过 GPS、北斗等有源定位设备进行船舶 自主定位,并通过连续多点差分计算本船航向与航速 [1]。 同时,通过 VHF 天线向周围船舶发送本船名称、国籍、 航向、航速等信息,并利用船载 AIS 计算单元对已获取 参数的目标进行航线分析,以保证航行安全。
1.2 导航雷达
雷达在船舶导航中的应用大大拓展了人的“可视” 范围,利用不同频段电磁波的传播特征,通过接收被目 标反射回来的电磁波并经由视频处理单元,最后在显示 终端标明目标的方位、距离、航向、航速等参数,该类 型雷达被称为导航雷达。
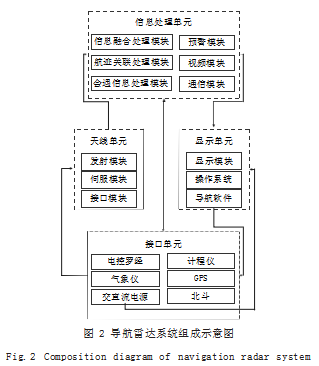
相比较传统雷达来说,导航雷达能够依托电控罗 经、计程仪等测向、测速设备对本船航向、航速信息进 行计算,从而将本船作为显示器的运动中心,并可以在 短时间内计算目标的真航向、真航速。同时,为保证船 舶航行安全,导航雷达系统软件还具备相对参数计算功 能如图 2 所示,并将相对参数作为计算会遇时间的重要 依据。
2 AIS 与导航雷达的问题分析
在海上航线日益繁忙的情况下,如何构建更加安全 的船舶导航体系就显得尤为重要,虽然, AIS 与导航雷 达的高低搭配形式从一定程度上缓解了该问题,但船舶 航行安全需要精准的数据作为支撑, AIS 与导航雷达在 实际使用过程中却不可避免地存在信息失准的情况,这 不仅是由于其抗干扰设计问题导致,还缺少能够实现多元数据融合处理的软件。
2.1 抗干扰设计缺陷
AIS 与导航雷达的工作原理都是通过发射和接收不 同频段电磁波来实现,因此,在相对复杂的电磁空间环 境中, AIS 与导航雷达极易受到干扰,这将严重影响 AIS 与导航雷达的信号质量,甚至造成系统内部单元的损坏等。
以导航雷达为例,在雨雪天气下,受雨雪的影响, 导航雷达将接收大量被雨雪反射后的杂波信号,而导航 雷达软件的雨雪抑制功能仅仅是通过阻抗变化影响关联 调制解调单元的滤波能力来实现。因此,面对雨雪导致 的干扰现象,在人工执行雨雪抑制功能时,导航雷达的 可靠性也将随着抑制功能的增强而下降,尤其是对于近海航行过程中的小目标来说,这种干扰处理机制具有较大风险。
2.2 信息融合处理软件缺失
基于系统误差、人为误差等相关误差因素的存在, 以及系统技术原理的差异, AIS 与导航雷达所提供的目 标方位、航向、航速等信息具有一定的偏差,从技术角度 来看,这种偏差是正常的,然而,在实际使用过程中, 这 一偏差的存在将对船舶航行安全带来一定的影响 [2]。根 据 AIS 与导航雷达的信息产生机制,其基准数据均来自 GPS,因此, AIS 与导航雷达在计算自身航向方面相对 较为准确,而导航雷达是通过电磁波反射定位的方式确 定目标方位、航向、航速等信息, AIS 则是通过VHF 接收 目标发送的信息后完成解算,两者误差形成机制不同。
目前, 船舶导航系统中无法实现对 AIS 与导航雷达 信息的融合,任何一方所提供的数据仅能够作为参考, 依然需要借助其他方式进行目标识别。由此可以看出, 信息融合处理软件的缺失不仅影响了船舶航行安全,同 时也增加了工作人员的压力。
3 AIS 与导航雷达信息融合机制的软件优化路径
为充分发挥 AIS 与导航雷达的技术优势,以及优化 多元信息的处理机制, 实现对 AIS 与导航雷达状态信 息、目标参数信息融合,为船舶航行安全提供高可信度 的参考。
3.1 软件架构设计
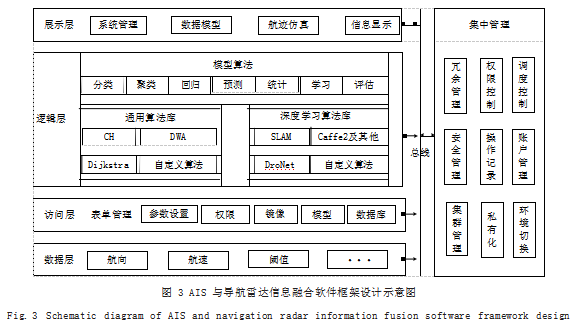
基于计算机软件技术的 AIS 与导航雷达信息融合机 制创新,以及参考综合导航系统的多元信息构成,该软 件架构设计如图 3 所示。
AIS 与导航雷达信息融合软件分为展示层、逻辑层、访问层、数据层,并通过系统总线接受综合导航系 统的集中管理。其中,展示层的核心功能是显示与交 互,而逻辑层则负责软件算法的管理和优化,访问层涉 及数据安全、数据模型等相关信息的管理,数据层作为 底层数据交互的重要平台。
3.2 AIS 与导航雷达信息融合机制
基于 AIS 与导航雷达在功能上的差异性,以及目标 参数信息显示特点,为保证船舶航行安全,则需要在信 息融合软件设计中通过目标融合算法与航迹融合算法实 现对航向、航速、距离的科学加权处理 [3]。由于系统误 差的存在导致 AIS 与导航雷达所获取的目标参数不同, 这增加了综合导航系统的目标判定难度,因此,通过 AIS 与导航雷达信息融合机制,可以判定目标参数的一 致性,并实现关联目标参数的动态融合。
目标融合算法的执行需要 AIS 与导航雷达所提供目 标信息误差在阈值范围内,为避免目标过于集中时的融 合误差,则航向、航速、距离 3 个要素的阈值设定分别 为 ±0.05°、±0.02kn/h、±0.01kn[4]。当 3 个要素全部 满足阈值要求时,则意味着 AIS 与导航雷达所探测的目 标为同一目标,可通过目标融合算法进行加权处理,赌 赢航向、航速、距离的融合计算公式如式(1)所示 :
其中, Cf 为 t 时刻 AIS 与信息融合后目标航向 ; ∆ AC(2)为 AIS 目标航向测量数据方差 ;
∆ R(2)C 为导航雷达目标航向测量数据方差 ; CAj 为 t 时刻 AIS 目标航向数据 ;
CRi (t) 为 t 时刻导航雷达目标航向数据。
同理,航速、距离、航向的融合计算公式如式(2)、式(3)所示:
AIS与导航雷达融合后的信息将作为最终显示信息 在终端上进行呈现,并能够对目标参数进行动态更新, 同时作为航迹融合算法的重要支撑。
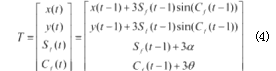
为进一步降低加权处理过程中系统误差对融合目标 参数的影响,可通过建立目标船舶运动模型实现系统误 差的优化,假设目标船舶的运动模型如式(4)所示:
其中,x(t-1)为目标船舶在t-1时刻相对本船的二维 坐标系横向距离;
y(1-1)为目标船舶在t-1时刻相对本船的二维坐标系 纵向距离;
α为目标船舶在航向上的加速度;
0为目标船舶的航向变化率。
由此,在忽略地球曲率的情况下,目标船舶的相对 距离计算公式如式(5)所示:
由此,基于目标融合算法和航迹向融合算法对目标 参数的处理,使AIS 与导航雷达的目标一致性显著提 升,同时也避免了单一来源的目标参数差异对船舶航行 安全的影响。
4结语
基于计算机软件技术的AIS 与导航雷达信息融合 机制将改变传统航行安全管理机制,集成计算单元的使 用,有效减轻了综合导航系统的压力,同时也提高了以 通信系统总线为依托的AIS 与导航雷达信息融合共享效 率,为船舶航行安全提供更加精准的数据参考。
参考文献
[1]贺丰收,缪礼锋,陶飞翔,等.基于AIS的对海雷达多目标融合 跟踪方法[J].雷达科学与技术,2017.15(2):153-158.
[2]申其兵.船舶导航系统中雷达与AIS信息融合系统分析[J].中 国修船,2017.30(6):37-40.
[3]俞金龙.船载AIS和雷达数据关联及融合[J].声学与电子工 程,2018(4):58-61.
[4]孙文杰,孙浩然.AlS与雷达数据融合技术研究[J].科技创新 与应用,2018(1):65-66.(C)1994-2023 China Academic Journal ElectronicPublishing House. All rights reserved. http://www.cnkinet
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/54368.html