SCI论文(www.lunwensci.com):
摘要:为了解决车辆检测和跟踪方面的问题,人们进行了大量的研究。深度学习的车辆检测和跟踪在精度和速度方面比传统方法表现出了更好的性能。本文简要介绍了基于深度学习的目标检测算法及YOLOv5网络模型,进一步研究基于YOLOv5s算法实现道路车辆的目标检测与跟踪。笔者通过训练得到模型,并针对日间无遮挡视线良好的多车道及夜间行车、大雾天气等视线不佳路况与有遮挡路况进行测试。经过测试结果分析,可知基于YOLOv5s算法的车辆检测与跟踪模型在日间无遮挡、夜间及大雾天气等情况下都可以获得较好的检测跟踪效果。当目标检测图片中包含不同尺度的目标,系统则会出现小尺寸目标无法检测的现象;在有遮挡时,会出现漏检和误检及少量ID Switch的情况。因此,在后续的研究中,相关人员需进一步研究与改善算法的性能。
关键词:深度学习;车辆检测与跟踪;YOLO端到端检测
Vehicle detection and tracking based on YOLOv5 algorithm
Wang Xiaoli,Zhao Zhenyi,Hu Yaozhong
(Hunan Institute of Technology,Hengyang HuNan,421002)
Abstract:A great deal of research has been done over the years to address the challenges of vehicle detection and tracking.Vehicle detection and tracking based on deep learning shows better performance than traditional methods in terms of accuracy and speed.This paper briefly introduces the target detection algorithm based on deep learning and YOLOv5 network model,and further studies the target detection and tracking of road vehicles based on YOLOv5s algorithm.The model was obtained through training,and tested under multiple lanes with good visibility in daytime,driving at night,poor visibility in foggy weather,and sheltered conditions.Through the analysis of test results,it can be concluded that the vehicle detection and tracking model based on YOLOv5s algorithm can achieve better detection and tracking effect in daytime without shelter,at night and in foggy weather.When the target detection image contains targets of different scales,the phenomenon of small size targets cannot be detected will occur.In the case of occlusion,there will be missed detection and misdetection and a small number of ID switches.Therefore,it is necessary to further study and improve the performance of the algorithm in the subsequent research.
Key words:deep learning;vehicle detection and tracking;YOLO;end-to-end detection
近年来,车辆检测与跟踪已成为智能交通监控和管理系统的重要应用工具,是许多智能交通的重要组成部分。例如,在交通网络表征、交通流预测、交通信号控制、车辆自动检测、交通事故处理、出行需求预测、自动驾驶和驾驶员行为检测等交通数据处理领域中,车辆检测与跟踪都发挥着至关重要的作用。传统的车辆识别系统主要依靠人工观察或车牌自动识别系统来识别车辆的型号和车型,难以满足实时性的要求,且容易出错。近年来,机器学习和深度学习取得了较大的发展,提升了实时目标检的水平。深度学习方法在检测精度和速度方面与传统方法相比表现出了更良好的性能。
一、基于深度学习的目标检测算法概述
深度学习目标检测算法分为两类,即两阶段检测算法(Two-stage detectors)和单阶段检测算法(Single-stage detectors)。两阶段检测算法都能通过各种算法生成目标候选框,然后通过卷积神经网络对目标进行分类。经典的两阶段检测算法有R-CNN、Fast R-CNN、Mask R-CNN等。单阶段检测算法不生成候选框,而是直接将对象边界框的定位问题转化为回归问题进行处理。单阶段检测算法主要有SSD、YOLO、YOLOv2、YOLOv3、YOLOv4、YOLOv5等。在这两类深度学习技术中,YOLO系列算法被认为是一种实用的在线目标检测算法,通过适当的神经网络可直接创建各种类别的检测框和置信度,YOLO系列算法已被用于各种场景检测任务中,其执行精度和速度都非常高。YOLOv5是YOLO的第五代,根据实验得出结论,它在速度和准确性方面都优于YOLO的其他模型。YOLOv5有四种结构,包括小尺寸(YOLOv5s)、中尺寸(YOLOv5m)、大尺寸(YOLOv5l)和特大尺寸(YOLOv5x),他们之间的区别在于架构参数的数量不同。
二、YOLOv5网络模型介绍
YOLOv5的网络结构图如图1所示,其网络结构分为四部分,即输入端、Backbone、Neck、Prediction。
 图 1 Yolov5 的网络结构图
图 1 Yolov5 的网络结构图
输入端主要实现Mosaic数据增强、自适应锚框计算及自适应图片缩放的功能。输入端利用随机缩放、随机裁剪、随机排布的方式进行拼接,从而达到增强数据集的作用。每次训练时,自适应计算不同训练集中的最佳锚框值,对不用长宽比的图片进行自适应缩放,并对原始图像自适应添加最少的黑边。
Backbone由Focus结构和CSP结构组成。首次将Focus结构引入YOLOv5,用于直接处理输入的图片。Focus结构重要的功能是通过Slice操作实现切片操作,如图2所示,原始443的图像切片后变成2212的特征图。
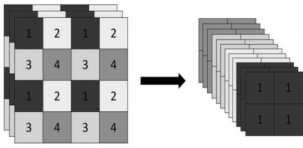
图2 Focus结构切片操作
切片后得到的图片相对于将原先的RGB三通道模式变成了12个通道,最后将得到的图片经过卷积操作,得到没有信息丢失的二倍采样特征图。以YOLOv5s为例,6086083的原始图像输入Focus结构,经切片操作后,先变成30430412的特征图,再经一次32个卷积核的卷积操作,最终变成30430432的特征图。
Neck网络使用FPN+PAN的结构,在YOLOv4的基础上进行改进,借鉴CSPnet设计CSP2结构,达到加强网络特征融合能力的目的。
YOLOv5使用GIOU Loss作为Bounding box的损失。在YOLOv5中,隐藏层使用了Leaky ReLU激活函数,最后检测层使用了Sigmoid形激活函数。三、基于YOLOv5实现车辆检测与跟踪的效果展示

图3训练参数图表
本设计选用YOLOv5s算法实现车辆检测与跟踪,对输入的图片进行训练,生成相应的训练模型及训练参数图表,如图3所示。
(一)车辆检测效果展示
基于图片的车辆检测结果如图4所示,可见训练好的模型可以较好地实现车辆检测,但也存在一定不足。当目标检测图片中包含不同尺度的目标,并且目标的尺度很小时,由于感受野是固定的且提取的特征图分辨率太低,小尺寸目标将无法被检测。
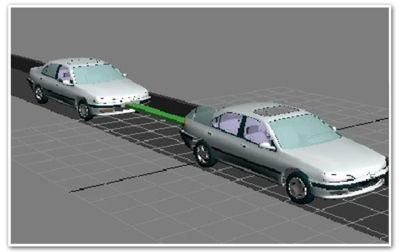
(二)车辆跟踪效果展示

图4目标检测图

图5无遮挡视线良好的多车道车辆跟踪结果
日间无遮挡视线良好的多车道车辆跟踪结果展示如图5所示,可见,此时可获得较好的跟踪效果。
夜间车辆跟踪结果展示如图6所示,可见,此时也可获得较好的跟踪效果。

图6夜间车辆跟踪结果展示
在大雾天气等视线不佳的情况下,车辆跟踪结果展示如图7所示,可见此时也可获得较好的跟踪效果。

图7大雾天气车辆跟踪结果展示

图8有遮挡时车辆跟踪结果展示
在有遮挡时,车辆跟踪结果展示如图8所示,可见,在有遮挡时,会出现跟踪目标丢失的情况。
四、结语
本文简要介绍了基于深度学习的目标检测算法与YOLOv5网络模型,进一步研究了基于YOLOv5s算法实现道路车辆的目标检测与跟踪。但由于研究时间较短、数据集收集较少、实验设备不佳,本文基于YOLOv5s算法存在一定的局限性。当检测与跟踪样本中出现遮挡时,会有漏检和误检的结果,也会出现少量ID Switch的情况,因此,在后续的研究中需进一步研究与改善算法的性能。
【参考文献】
[1]高芳芳,武振超,索睿,等.基于深度学习与目标跟踪的苹果检测与视频计数方法[J].农业工程学报,2021(21).
[2]李敏,吴莎.基于深度学习的粒子滤波视频目标跟踪算法[J].计算机技术与发展,2020(6).
[3]张新强,骆辉,周国顺.基于深度学习的移动机器人目标跟踪系统[J].计算机系统应用,2020(3).
[4]左国才,苏秀芝,陈明丽,等.基于深度学习抗遮挡的多目标跟踪研究[J].智能计算机与应用,2020(7).
[5]赵瑜,方亮,周云,等.基于深度学习理论和压缩感知技术的车辆识别与跟踪研究[J].地震工程与工程振动,2021(5).
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/43087.html