SCI论文(www.lunwensci.com)
摘要:随着科学技术的发展,机器人在各类生产生活场景中的广泛应用,运行过程中会遇到各种障碍物,存在伤害人、破坏物体、本体损坏等方面的安全隐患。多年来,国内针对机器人安全技术进行了诸多研究,其中碰撞检测是机器人安全技术研究的关键问题。碰撞检测技术可以预测模拟或制止机器人在运动过程中的碰撞,是防止事故发生、及时止损的有效途径之一,对于保证机器人的安全性具有非常重要的现实意义。通过查询万方数据库,以“机器人碰撞检测”为关键词,检索筛查有效文献共有344篇,并从文献的发表时间分布、文献类型分布、文献涉及的研究机构分布、文献涉及的扶持项目、机器人碰撞检测技术路径等多方面进行详细分析,剖析了机器人碰撞检测技术领域的研究现状,预测了未来其技术发展趋势,为后续研究方向和国家制定政策提供参考。
关键词:碰撞检测技术;文献研究;机器人
Research on Domestic Literature on Robot Collision Detection Technology
Guo Haiyan1,Hu Weijian1,2,3,Wang Haixia1,2,3,Wang Qingzhong1,2,3,Gao Xiaodong1,2(1.Guangdong Testing Institute of Product Quality Supervision,Foshan,Guangdong 528300,China;
2.Key Laboratory of Safety of Intelligent Robots for State Market Regulation,Foshan,Guangdong 528300,China;
3.National Industrial Robot Quality Inspection Center(Guangdong),Foshan,Guangdong 528300,China)
Abstract:With the development of science and technology,robots are widely used in various production and living scenes,the robot encounters various obstacles during its operation.There are potential safety hazards such as injury to people,damage to objects,and damage to the machine.Over the years,there are many researches on robot safety technology in China,collision detection is the key problem of robot safety technology.Collision detection technology can predict and simulate or prevent the collision of robots in the process of movement,which is one of the effective ways to prevent accidents and stop losses in time,and has very important practical significance to ensure the safety of robots.By querying the Wanfang database and using the keyword"robot collision detection",a total of 344 valid literature are found and screened.A detailed analysis is conducted from various aspects such as publication time distribution,literature type distribution,research institutions involved in the literature,support projects involved in the literature,and robot collision detection technology path.The current research status in the field of robot collision detection technology is analyzed,and the future development trend of its technology is predicted,providing reference for future research directions and national policy formulation.
Key words:collision detection technology;literature research;robot
0引言
近年来随着科学技术的飞速发展,工业4.0时代来临,传统制造业逐步转型,走向智能制造[1]。机器人作为智能制造的核心,能够实现提升效率、降低成本、标准化生产等一系列提质升级的良好效果,甚至能够适应高温严寒、上天入海等人类无法作业的工作环境,因而广泛应用于制造业、服务业、医疗、航空航天等领域。随着在各类生产生活场景的广泛应用,机器人工作环境也日趋复杂,与周围的人或物体的界限被打破,在运行过程中会遇到各种障碍物,存在伤害人、破坏物体、本体损坏等方面的安全隐患。现实生活中已经出现了不少机器人伤人事件和生产安全事故,防碰撞成为机器人应用技术不可回避的问题,越来越受到各行各业的重视[2-3]。
碰撞检测是机器人安全技术研究的关键问题,主要确定两个或多个物体之间是否发生接触或穿透,可以预测模拟或制止机器人在运动过程中的碰撞,是防止事故发生、及时止损的有效途径之一,对于保证机器人的安全性具有非常重要的现实意义[4]。多年来,国内的机器人碰撞检测技术研究持续发展,积累了不少研究成果,本文将着重针对国内关于机器人碰撞检测技术研究状况的文献进行调查和分析,以期为该领域的研发现状和未来技术领域的发展趋势提供一些参考[5]。
1研究方法及数据来源
本文采用文献计量统计法,对近几十年在国内公开发表的机器人碰撞检测技术研究方面的文献进行分析,以反映当前国内的机器人碰撞检测技术研究动态。基于Excel软件,针对搜集到的文献进行数据分析处理,从时间序列、文献类型、研究机构、研究领域、技术路径等多个角度对其进行分析,描绘机器人碰撞检测技术国内研究的科学知识图谱、科研产出情况,分析当前机器人碰撞检测技术国内研究的热点与趋势[6]。
本文以万方数据库为数据来源,采用文献搜索方法,设置搜索关键词为“机器人碰撞检测”,设定时间范围为不限,检索文献类型不限,包括学位论文、期刊、会议论文、专利等等。截止2023年3月4日文献分析统计工作结束时,检索共计694篇文献,通过人工筛选,剔除与主题不相关的文献或者重复的文献,最终得到344篇有效文献。
2文献统计分析
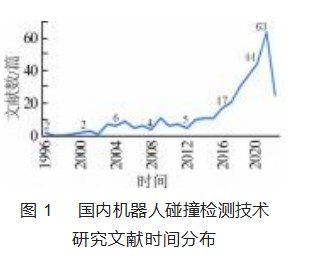
2.1时间分布
根据筛选的344篇有效文献,通过Excel软件,分析文献发表的时间序列,得到如图1所示的结果,通过数据变化规律,反映国内机器人碰撞检测技术研究的发展历史。由图可知,国内机器人碰撞检测技术研究文献从1996年开始发表。北京科技大学的刘志强等[7]首次针对工业机器人展开碰撞检测研究。同一年,当时就读于哈尔滨工业大学的王树国[8]针对空间机器人避障问题,提出了截面法和面体包容法两种碰撞检测方法,这是我国首次提出机器人碰撞检测方法的公开文献,为机器人仿真系统的碰撞检测技术研究奠定了基础。1999年,哈尔滨工业大学任世军[9]提出从机器人路径规划的角度研究机器人的碰撞检测,在机器人离线仿真系统中图形学的理论和方法基础上,通过空间中物体的求交运算来解决碰撞检测问题,检测工具主要是CCD摄象机、超声波、红外线、激光等传感器。
纵观文献发表的时间分布发现,国内机器人碰撞检测技术研究发端于1996年,随后两年,相关技术研究处于空白期,1999年以后才有文献持续不断发表,并以2015年为分水岭。2015年以前文献发表数量较少,均在11篇以内,增长趋势起伏不定。自2016年起,文献发表呈现快速增长的趋势,到2021年达到顶峰63篇,2022年急剧下降至25篇。总体看,机器人碰撞检测技术还不是国内技术研究的热点,国内学术界给予的关注度不高,学术成果数量不多,20余年来文献总量344篇。文献的数量不仅说明了学术研究的情况,同时也反映了相关技术发展的水平,可以说,当前国内机器人碰撞检测技术还不够成熟。随着智能制造时代的到来,各行业对机器人的安全性和智能化要求越来越高,碰撞检测技术是提升机器人安全性和智能化水平的关键问题,今后仍具有很大的研究空间[10]。
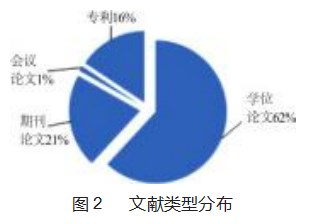
2.2类型分布
基于文献类型统计分析344篇有效文献,学位论文213篇,其中博士学位论文27篇、硕士学位论文186篇;期刊论文73篇,其中北大核心、CSTPCD、EI等核心论文54篇;会议论文4篇;专利54项,其中发明专利43项,实用新型专利11项。按照每种类型的文献占比分析,得图2所示分布。由图可知,学位论文比重最大,占总数的62%;其次为期刊论文,占总数的21%;专利占总数的16%;会议论文最少,占总数的1%。由此可知,机器人碰撞检测技术研究的作者大多集中在高校的研究生群体,作为学科细分专业的研究方向,特别是硕士研究生,其硕士论文就占比54%。学位论文的高占比意味着碰撞检测技术目前依旧停留在学术研究阶段,并没有大规模商业化应用。
2.3研究机构分布
344篇有效文献的作者所在机构主要分布在高校、技术机构和企业。统计作者所在机构,如图3所示。由图可知,文献发表量排名前10的研究机构均为高校,其中文献数量最多的机构为哈尔滨工业大学,共发表77篇;其次为广东工业大学16篇、合肥工业大学12篇、南京航空航天大学10篇,其余机构均在10篇以下数量较少。由此看出,国内的机器人碰撞检测技术研究主要集中在高校,而在高校中,哈尔滨工业大学是绝对主力,贡献诸多学术成果。
以上结论与学位论文在344篇有效文献中占比最大有直接关系,但是,在131篇另外两种文献中,高校共计发表84篇,依然占比较高。企业仅在专利发布方面占比较大,54项专利中占28项。综合来看,在国内的机器人碰撞检测技术研究中,高校是研究主力。
2.4涉及扶持项目
机器人作为战略新兴产业,具有技术研发投入大、回报周期长等特点,必然需要政府资金的支持才能得以发展。统计分析344篇有效文献涉及的资金扶持项目发现,学位论文中2篇涉及资金扶持,73篇期刊论文中50篇涉及资金扶持,会议论文和专利未注明资金扶持情况。52篇涉及资金扶持的论文中,大多数同时获得国家及部委扶持资金项目、省级项目资金。分析资金扶持项目类型分布,得到图4。由图可知,排名前3名:国家及部委扶持资金项目共42篇;广东省(含市厅)扶持资金项目共6篇;广西扶持资金项目共3篇。由此可知,国家及部委对机器人碰撞检测技术支持力度最大,在全国各省份中,广东、广西也是给予支持力度较大的省份。
分析42篇涉及国家及部委扶持资金项目的文献,其中,涉及国家自然科学基金项目达30篇、国家高技术研究发展计划(863)达12篇,由此可见,该两类扶持资金是机器人碰撞检测技术研发重点申请的资金项目。
2.5检测技术路径分析
目前国内文献关于机器人碰撞检测技术的研究大致分为3类:碰撞检测算法和实现机理研究[11-21]、碰撞检测仿真平台研究[22-30]、碰撞检测测试技术研究。
1999年任世军在其博士论文《机器人路径规划中碰撞检测算法的研究》中针对空间中物体的求交运算进行大量的研究,并以此来解决机器人碰撞检测问题,这是国内最早的关于机器人碰撞机理和碰撞算法的研究。之后的20多年时间里共有237篇幅文献是关于碰撞检测算法研究的,占总文献比例将近69%。由此可见研究机构更加热衷于碰撞算法研究,这也与研究机构大多为高校有关。关于碰撞检测算法的文献有287篇,占比83.4%,关于碰撞检测仿真系统的文献有220篇,占比64%,算法和仿真系统两者都有研究的文献有174篇,占比51%,关于防碰撞的装置专利有11篇,占比3%。
从目前的研究成果看,绝大部分的文献都是研究机器人碰撞的算法和实现的机理以及仿真平台。缺乏对机器人碰撞测试性能的测试分析。为了评价机器人碰撞特性好与不好,其最重要的指标即为碰撞响应时间的快慢和碰撞力的大小。机器人碰撞响应时间是指机器人发生碰撞至完全停止的时间,碰撞力是指在这一碰撞过程中发生的最大力。碰撞响应时间越快,碰撞力越小,机器人的碰撞特性就越好。作为一个检测机构,后续可以对这一方面加大力度研究,以填补国内空白。
3发展趋势与展望
通过对机器人碰撞检测技术的国内文献检索,从时间序列、文献类型、研究机构、研究领域、技术路径等多个角度对其进行分析,描绘了机器人碰撞检测技术国内研究的科学知识图谱、科研产出情况,分析当前机器人碰撞检测技术国内研究的热点与趋势。
(1)国内机器人碰撞检测研究始于1996年,此后各大高校开始陆陆续续的研究,直到2015年后每年文献发表量有了显著的提高,并于2021年发表文献数量达到最高峰63篇。由此说明机器人碰撞检测技术也就是在近两年得到较为火热的研究。但是其研究成果较机器人其他领域并不多,也可看出社会各界对机器人碰撞检测的关注度不够。
(2)从文献分布类型和研究机构角度看,机器人碰撞检测技术的研究成果大多数是以高校研究生所发表的学位论文为主,由企业主导的专利占比较少。由此说明机器人碰撞检测技术依旧停留在理论研究阶段,商业化应用程度低,这也与国内机器人发展水平有关。值得一提的是哈尔滨工业大学在机器人碰撞检测领域有着诸多的成果,是这一研究领域的绝对主力。
(3)从文献涉及的扶持项目(基金项目)看,具有基金项目的文献共有52篇,占比约为15%。大部分为国家自然科学基金或者部级以上基金项目,由此也可看出,机器人碰撞检测这一领域的研究目前还是由国家主导,国家层面的扶持力度和重视程度都高于省级或地市级。
(4)从机器人碰撞检测技术路径看,目前国内文献大部分是对碰撞检测算法及其实现机理的研究以及碰撞仿真平台的研究,缺乏对机器人碰撞测试性能的评价与检测分析。碰撞响应时间和碰撞力是衡量机器人碰撞性能的主要指标,如何评价或者测试目前文献并没有过多的研究,检测机构可以对这一方面加大力度研究,以填补国内空白。
4结束语
本文在万方数据库通过对机器人碰撞检测技术进行检索,得到国内关于机器人碰撞检测技术这一领域的研究文献(包括期刊、学位论文和专利)共344篇,最早开展这一研究的是1996年北京科技大学和哈尔滨工业大学的研究人员,对碰撞检测算法进行了研究,随后的20多年来大部分研究人员都对碰撞检测算法或者仿真或者其机理进行了大量的研究,缺乏对其碰撞性能(特别是碰撞响应时间和碰撞力)的评价和测试分析,目前国内研究人员对于这一方面的研究还是空白,检测机构可以在这一方面加大研究力度,以满足这一技术的监管要求,促进这一领域的协同发展。
参考文献:
[1]王青,王宇璐.工业机器人应用对制造业高质量发展的影响研究[J].工业技术经济,2023,42(2):115-124.
[2]张振宇,钟佩思,张超,等.基于工业机器人动力学模型的差分力矩偏差碰撞检测方法[J].制造技术与机床,2023(3):163-172.
[3]黄沿江,汪子钦,张宪民,等.人与机器人共存中的位姿估计与碰撞检测[J].机器人,2022,44(3):281-290.
[4]居鹤华,冷舒.利用虚拟传感器的巡视器机械臂碰撞检测算法[J].哈尔滨工业大学学报,2016(1):58-65.
[5]李智靖,叶锦华,吴海彬.基于卷积力矩观测器与摩擦补偿的机器人碰撞检测[J].浙江大学学报(工学版),2019,53(3):427-434.
[6]任世军,孟庆鑫,杨姗姗.路径规划中两个多面体的快速碰撞检测算法[J].哈尔滨工业大学学报,2001,33(2):252-254.
[7]刘志强,刘淑春,马香峰.工业机器人的双透视图示教和碰撞检测[J].工程图学学报,1996(1):9-17.
[8]王树国.空间机器人地面实验综合平台仿真系统[D].哈尔滨:哈尔滨工业大学,1996.
[9]任世军.机器人路径规划中碰撞检测算法的研究[D].哈尔滨:哈尔滨工业大学,1999.
[10]武士达.人机协作环境下的工业机器人碰撞检测研究[D].武汉:华中科技大学,2021.
[11]陆济民.基于模型的工业机器人碰撞检测及反应技术研究[D].南京:南京航空航天大学,2019.
[12]李强.基于关节力矩传感器的碰撞检测与柔顺控制研究[D].哈尔滨:哈尔滨工业大学,2019.
[13]糜凯.面向多种约束的工业机械臂避障运动规划方法研究[D].北京:中国科学院大学,2020.
[14]詹志平.工业机器人碰撞检测及应对处理的研究[D].杭州:杭州电子科技大学,2020.
[15]白佳薇.外肢体机器人的碰撞检测与响应策略研究[D].济南:山东大学,2021.
[16]郑义,田威,胡俊山,等.双移动工业机器人系统碰撞检测方法[J].自动化技术与应用,2020,39(12):82-86.
[17]王志军,刘璐,李占贤.基于六维力传感器的机器人本体碰撞点检测研究[J].农业机械学报,2021,52(7):395-401.
[18]张春涛,王勇,穆春阳,等.基于快速动力学辨识的机器人力/位混合控制碰撞检测研究[J].仪器仪表学报,2021,42(6):161-171.
[19]李亚昕,王国磊,张剑辉,等.基于碰撞反馈的冗余机器人避障规划算法[J].清华大学学报(自然科学版),2022,62(3):408-415.
[20]马礼,王强,杨银刚,等.基于三维物体特征图的动态碰撞检测方法[J].计算机测量与控制,2016,24(8):59-62.
[21]陈赛旋.协作机器人零力控制与碰撞检测技术研究[D].合肥:中国科学技术大学,2018.
[22]任倩,王树国,陈祥立,等.基于虚拟现实的机器人离线编程技术的研究[J].机器人,2003,25(2):172-177.
[23]陈善言,关永,施智平,等.机器人碰撞检测方法形式化[J].软件学报,2022,33(6):2246-2263.
[24]崔亚飞,罗辉,秦龙.基于数字孪生的工业机器人运动仿真[J].机电工程技术,2022,51(12):183-186.
[25]陆勇.面向数字孪生的手眼协调控制研究[D].西安:长安大学,2020.
[26]游东洋.六自由度机器人动力学仿真与双末端执行器加工平台设计[D].哈尔滨:哈尔滨工业大学,2019.
[27]高茂源,王好臣,丛志文,等.基于RobotStudio的机器人上下料工作站仿真分析与优化[J].组合机床与自动化加工技术,2020(8):60-63.
[28]王学谦,梁斌,李成,等.自由飞行空间机器人遥操作三维预测仿真系统研究[J].宇航学报,2009,30(1):402-408.
[29]苑玉鹏,杨宜民,梅平.基于多传感器的礼仪机器人智能避障系统研发[J].工业控制计算机,2014,27(12):34-36.
[30]张平,杨时杰,梁斌.基于Java 3D的空间机器人运动仿真系统[J].计算机应用研究,2007(9):19-21.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网! 文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/77145.html