SCI论文(www.lunwensci.com)
摘要:为了保证所设计的钢质壁面作业机器人的底盘架结构能够满足其机械特性, 通过 SolidWorks 软件建立底盘架三维实体模型, 利用 ANSYS Workbench 开展静力学 、模态和谐响应的静动力特性仿真 。静力学分析结果表明: 底盘架结构在承受最大负载时的最 大应力值为 4.838 MPa; 最大位移变形量为 6.069 75×10-6 mm; 强度和刚度均符合设计要求 。模态分析结果表明: 底盘架结构前 6 阶 固有频率分布在 291.32~613.62 Hz 之间; 结构的主要振型形式在 Y轴方向和绕 Y轴旋转方向 。谐响应分析结果表明: 特定激振频率 下的薄弱位置在接近 294.00 Hz 和 658.00 Hz 两个固有频率时会发生共振, 各激振频率下应力均满足强度要求 。研究结果对解决共 振问题有重要意义, 可为机器人驱动电机选型 、机械臂装置设计提供理论依据, 为机器人后续设计及优化提供指导。
关键词 :钢质壁面机器人,底盘架,静力学分析,模态分析,谐响应分析
Simulation on Static and Dynamic Characteristics of Chassis Structure of Robot for Steel Wall Working
Liang Kangyang1. Yan Jin2. Pang Cuijuan1
( 1. College of Ocean Engineering and Energy, Guangdong Ocean University, Zhanjiang, Guangdong 524088. China;
2. College of Shipping and Maritime Science, Guangdong Ocean University, Zhanjiang, Guangdong 524005. China)
Abstract: In order to ensure that the chassis structure of the designed steel wall work robot can meet its mechanical characteristics , the 3D
model of the chassis frame structure is designed and modeled by Solidworks, and ANSYS Workbench is used to carry out static dynamic
characteristics simulation from its static mechanics, modal, and harmonious response. The static analysis results show that the maximum stress
value of the chassis structure under maximum load is 4.838 MPa. The maximum displacement deformation is 6.069 75×10-6 mm; Both strength
and stiffness meet the design requirements. The modal analysis results show that the natural frequency distribution of the first six orders of the
chassis structure is 291.32~613.62 Hz. The main mode shape of the structure is in the Y-axis direction and the rotation around the Y-axis. The
harmonic response analysis results show that the weak position at a specific excitation frequency will resonate when it is close to the two natural
frequencies of 294.00 Hz and 658.00 Hz, and the stress at each excitation frequency meets the strength requirements . The research results are
of great significance for solving the resonance problem, which can provide a theoretical basis for the selection of robot drive motor and the
design of robotic arm device, and provide guidance for the subsequent design and optimization of robots .
Key words: steel wall working robot; chassis frame; static analysis; modal analysis; harmonic response analysis
引言
钢质壁面作业机器人是极限作业机器人的一个分支, 可在垂直钢质壁面上进行作业以代替人类完成危险工作, 主要应用在石油化工 、船舶修造等领域, 对大型罐体、 巨型墙面 、船体等区域进行清洁 、探伤 、焊接 、除锈等 功能作业[1-4]。
底盘架作为机器人主要承载框架, 整体受力大, 其 强度和刚度特性直接影响机器人的安全性和稳定性[5]。 在实际工作环境中, 爬行壁面的不平度 、机器人部件装 配间隙及驱动电机运转等内外因素会使爬行中的机器人 产生振动激励[6-7], 容易使机器人底盘一直处于振动状 态[8-9] 。振动激励容易诱发结构共振进而产生较高动应力, 造成结构的强度破坏 、疲劳破坏, 甚至结构失稳[10]。 因此, 钢质壁面作业机器人底盘架强度 、刚度和振动特 性的研究直接关系到机器人的设计制造质量以及正常作 业, 具有现实意义。
近年来, ANSYS 有限元软件为机械结构在静力学 、 动力学分析提供了方便快捷的计算方式[11- 18] 。利用其强 大的分析功能对机械结构开展静力特性 、振动特性分析, 能获得机械结构体接近实际情况的结构特点 。 目前国内 外学者对壁面机器人结构特性分析研究较多 。王新等[13] 采用 ANSYS Workbench 对垂直攀爬机器人进行静力学分 析, 得到了机器人的应力云图和变形云图, 证明了垂直攀 爬机器人设计的合理性 。辛加旭[1]利用 ANSYS Workbench软件对钢制壁面作业机器人的关键零部件进行静力学分 析, 判断和验证各关键零件的安全性能 。 曾红等[2]基于 有限元法, 分析爬壁焊接机器人三角架组合体的静态和 动态特性 。彭上乾[3]通过 ANSYS 有限元分析软件对垂直 攀爬机器人的关键部件进行了形状优化而达到减重的轻 量化设计, 有限元静力学分析确定其结构材料的选择满 足刚度强度要求, 模态分析验证了结构本身固有振动特 性的合理性。
综上所述, 对壁面作业机器人结构特性的分析研究 较多集中在静力特性分析, 对动态特性分析得较少, 尤 其是对于钢质壁面作业机器人底盘架结构, 缺少静动态 特性的综合研究。
本文利用 SolidWorks 软件建立底盘架的三维实体模型, 在 ANSYS Workbench 有限元软件中对底盘架结构系 统地进行静力学分析、模态分析和谐响应分析, 开展静动 力特性研究, 以期更准确、全面地了解底盘架结构特性。
1 底盘架模型构建
1.1 方案设计
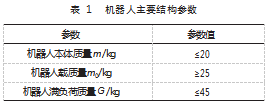
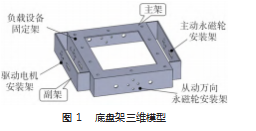
所设计的钢质壁面作业机器人的主要结构参数如表 1 所示 。机器人底盘架总长 420 mm, 总宽 400 mm, 总高 度 80 mm, 由主架和副架组成 。底盘架中间部位为主架, 左右两侧为副架 。底盘架前后两端安装从动万向永磁轮; 左右两侧安装移动机构和驱动系统, 包括主动永磁轮、 带轮传动装置; 中间内部安装驱动电机; 上方部位安装 控制箱 、机械臂作业系统等负载设备固定架 。底盘架用 作钢质壁面作业机器人本体的主要承载框架。
1.2 材料属性
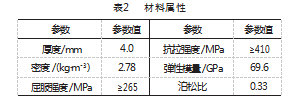
为满足设计要求, 根据材质的机械性能和经济性, 底盘架选用强度和刚度性能高的 2A12 硬铝合金板 。该铝 合金为高强度硬铝, 密度小 、强度大 、机械加工和点焊 焊接性良好, 主要用于制作各种高负荷的零件和构件, 如骨架零件 、隔框 、翼肋等 150 ℃以下工作零件 。底盘 架由铝合金板折弯 、焊接和机加工成型 。底盘架主要参 数如表 2 所示。
1.3 三维实体模型
根据设计要求, 利用 SolidWorks 软件建立了底盘架 三维实体模型 (图 1)。
2 静力特性有限元分析
根据机械振动理论[19], 钢质壁面作业机器人底盘架 可看成一个振动系统, 其动力学基本方程为:
Mx"+Cx'+Kx=F(t) ( 1 )
式中: M 为质量矩阵; C 为阻尼矩阵; K 为刚度矩阵; x" 为加速度矢量, x '为速度矢量, x 为位移矢量; F(t)为外 力矢量。
式 ( 1 ) 揭示了在外力作用下底盘架系统随时间变化 的运动规律。
2.1 静力学分析方法
忽略与时间 t 相关的变量, 载荷恒定 。对式 ( 1 ) 作 整理, 得到底盘架系统的静力学平衡方程:
Kx=F ( 2 )
式中: K 为刚度矩阵, 为常量矩阵, 包含材料属性 、模 型尺寸和约束条件; F 为静态加载在模型上不考虑随时 间变化的力, 且不包含诸如质量 、阻尼等的惯性影响。
式 ( 2 ) 反映了底盘架在静载荷下形变与力的关系。
由于 ANSYS Workbench 有限元软件的 “Static Struc‐ ture” 静力学分析模块能够完成几乎所有静力学分析任 务, 可用于求解结构在静载荷作用下的位移响应 (包括 位移 、应变等) 和内力响应 (包括内力 、应力等)。 本文 采用“Static Structure”静力学分析模块求取底盘架的刚 度 、强度和安全系数等性能指标。
2.2 底盘架模型网格设计
为提高有限元分析质量, 选择四面体结构类型网格, 以应力变动幅度 5% 作为网格无关解分析依据进行判断, 并利用正交品质法对网格质量进行检查, 最后确定合适 的尺寸 。通过应力预求解和对比, 进行网格无关性分析, 本研究选取网格单元边长为 2.0 mm 。经过正交质量评 估, 网格平均质量评分为 0.64. 网格质量评价高 。底盘 架网格模型包括 307 642 个节点和 162 406 个单元, 总质 量为 2.60 kg。
2.3 边界条件及载荷施加
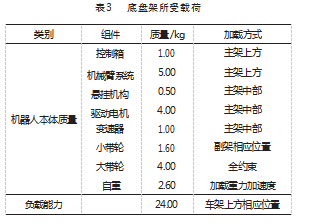
选取机器人在垂直状态 、满负载的工况环境下对底 盘架进行分析, 此时底盘架受力情况最大 。底盘架在工作过程中所受到的载荷主要是车架自重, 机械臂作业系 统 、驱动系统 、传动系统等重力, 以及机器本体的负载, 具体所受载荷分布情况[14- 15]见表 3 。根据底盘架各种载荷 的大小, 在相应的位置以均布或集中载荷形式加载到相 应位置面, 其中车架重力通过设置 9.80 m/s2 加速度重力 场环境来处理。
为模拟底盘架实际工况和提高计算精准度, 须合理 施加约束 。底盘架通过左右两侧主动永磁轮支撑, 并能 够使机器人在任意姿态下安全吸附行走, 因此将主动永 磁轮安装孔处的轴承约束设为车架的全约束边界条件, 从而使底盘架与主动永磁轮之间没有相对移动, 进行固 定约束。
2.4 结果与分析
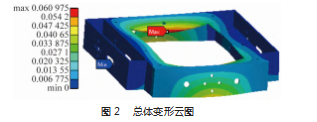
( 1 ) 底盘架总变形情况
经过运算求解, 得到底盘架的总位移变形结果如图 2 所示 。可见, 最大变形位于主架内部前后上沿的中间 位置, 较大变形发生在下方位, 变形呈对称分布, 最大 变形量为 0.060 975 mm 。 以“变形量小于所设计的整体 长度的 1/1 000”作为刚度性能的判断依据, 最大变形量 远小于判断值 0.42 mm, 可知底盘架最大变形很小, 满 足刚度要求。
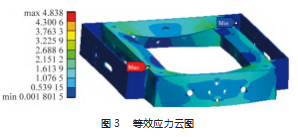
( 2 ) 底盘架应力情况
底盘架等效应力结果见图 3. 可知, 最大应力位置 在主架与副架连接处, 较大应力位置在主动永磁轮安装 孔和主架中空部位各转角处 。最大应力值为 4.838 MPa, 远小于所选材料的许用应力, 在最大许可范围以内, 能 够安全工作。
由静力学分析结果可知, 底盘架受力较为均匀, 未 产生较大应力和变形 。针对出现的应力集中现象, 在底 盘架的设计制造过程中应注意加强相应位置的强度, 如 采取机加工工艺处理 、优化结构等措施解决。
3 模态分析
3.1 理论分析及求解方法
基于式 ( 1 ) 动力学基本方程, 当底盘架结构为自由 振动并忽略结构阻尼时, 即 F(t) = 0 和 C = 0. 式 ( 1 ) 动 力方程可简化为无阻尼自由振动方程:
M%"+K%=0 ( 3 )
假定作简谐振动, 取其解为如下形式:
% = Xsin ( ωt+θ) ( 4 )
式中: % 、X 为 n 维矢量, 通常 X 被称为振幅矢量。
将式 ( 4 ) 代入式 ( 3 ), 整理后可得振动特征方程:
( K-ωi2 M) Xi=0 ( 5 )
式中: ωi2 为方程的特征值, ωi 为结构固有圆频率; 特征 向量 Xi 为相应固有频率对应的振型, 表示第 i 阶模态或 振型。
使用 ANSYS Workbench 有限元软件的“Modal”模态 分析模块, 基于静力学的有限元模型, 边界约束条件与 静力学分析相同, 对底盘架结构进行模态分析求解, 获 得底盘架各阶固有频率和振型, 以确定该结构的固有振 动特性。
3.2 结果与分析
为寻找主要的振型形式和提高模态求解精度, 以模 型参与求解的“有效质量与总质量的比值 0.8”为评估标 准[8] 。经运算对比分析, 第 48 阶模态结果的“Y DIREC‐ TION” 和 “ROT Y DIRECTION” 比 值 系 数 分 别 为 0.912396 和 0.918711. 已超过 0.8. 满足评估条件, 得出 底盘架的主要振型形式在 Y轴方向和绕 Y轴旋转方向。
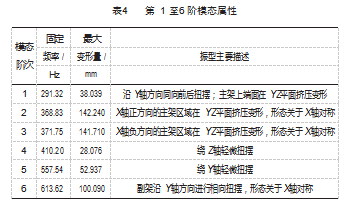
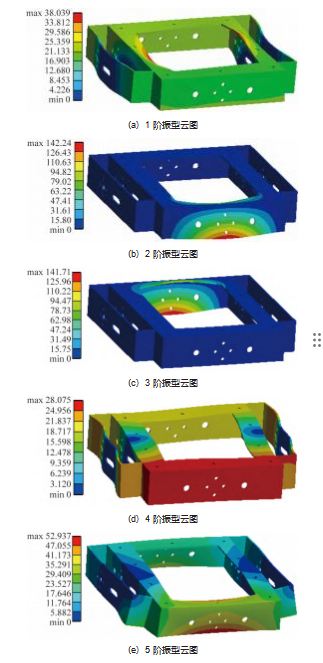
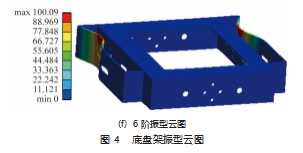
由振动理论可知, 连续体结构具有无限阶固有频率, 工程实践应用中多以低阶固有频率作为衡量结构动力学 特性的重要指标 。 同时考虑到本节模态分析是作为谐响 应分析的数据参考, 因此提取前 6 阶的模态结果进行研 究, 结果如表 4 、图 4 所示 。明显得知, 底盘架结构前 6 阶的固有频率分布在 291.32 ~ 613.62 Hz 之间, 固有频率 在第 2 阶和第 5 阶处有发生突变现象, 其他阶之间的固有 频率相对平缓变动 。结构主要在 Y 轴方向扭摆, 表征了主要振型的形式 。第 1 阶振型固定频率在整个结构中最 低, 变形量幅度最小, 表明了底盘架结构的抗振能力强。
4 谐响应分析
4.1 理论分析及求解方法
谐响应分析是分析结构在不同频率的简谐载荷作用 下的系统动态响应, 其目的是确保结构能够经受住不同 频率的载荷, 并且分析结构的共振响应, 以避免共振的 发生。
由于机器人自身部件装配间隙 、 电机运转等因素 的存在, 底盘架有可能会承受多个不同频率和相位的 简谐载荷作用 。考察底盘架结构在外部激励下的动态 响应, 有效预测和评估底盘架结构的持续动力特性, 显得尤为重要。
根据式 ( 1 ), 当底盘架结构承受的外载荷为简谐载 荷时, 即外力矢量 F(t) 和位移 % 为简谐矩阵时, 设外载 荷频率为 ω, 式 ( 1 ) 经过欧拉转化后, 联立可得谐响应 分析的运动方程[16]:
( -ω2M + iωC +K)(%1+i%2 ) = F1+iF2 ( 6 )
式中: F1 、F2 分别为 F 的实部和虚部; %1 、%2 分别为 % 的 实部和虚部; i 为单位复数 。求解式 ( 6 ) 可得到底盘架 系统谐响应的位移变化量。
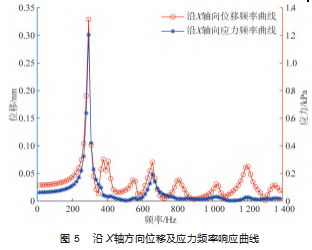
在谐响应分析中, 底盘架中的所有节点都以相同频 率 、不同相位进行运动 。从整个机架分析, 底盘架同时 搭载着驱动电机 、行走机构及机械臂旋转盘等部件, 其 受到驱动电机的振动影响最大 。以驱动电机轴承安装位 置节点为观察点, 分别采集位置节点在 X 轴 、Y轴 、Z 轴 3 个方向的位移及应力响应数据, 分别如图 5~7 所示。
4.2 结果与分析
由图 5 可知: X 轴方向, 外激振频率值在 294 Hz 附 近 出 现 最 大 振 幅 和 最 大 应 力, 位 移 最 大 峰 值 为 3.29× 10-7 mm, 最大应力为 1.204×10-3 MPa 。此时外激振频率 值与模态分析的第 1 阶固有频率值 291.32 Hz 非常接近。
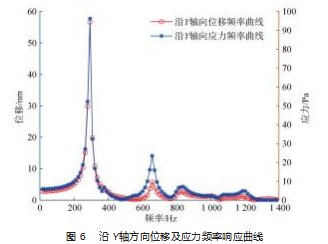
由图 6 可知: Y轴方向, 在外激振力作用下, 位移和 应力变化趋势基本一致, 外激振频率值在 294 Hz 附近出 现最大振幅和最大应力, 位移最大峰值为 5.67×10-5 mm, 最大应力为 9.6171×10-5 MPa。
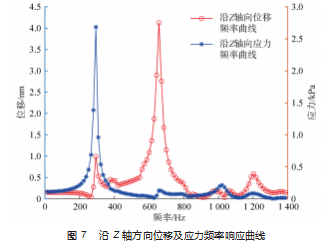
由图 7 可知: Z 轴方向, 外激振频率值在 294 Hz 附 近出现最大应力峰值, 在 658 Hz 附近出现最大振幅峰 值; 位 移 最 大 峰 值 为 4. 123 8×10-6 mm; 最 大 应 力 为 2.684 4×10-3 MPa 。此时外激振频率值接近模态分析的第 1 阶和第 8 阶固有频率值。
从上述的分析结果可知, 当外激振频率值在 294 Hz、 658 Hz 附近时位移达到峰值状态, 表明该激励频率下存 在发生共振的危险, 在电机选型时应着重考虑 。 Y 轴 方向在各频段的振幅值最大, 是因为与模态分析时结 构的主要振型形式在 Y 轴方向和绕 Y 旋转方向的判断 结论一致。
XYZ 三个方向最大动应力峰值均出现在 294 Hz 附近, 但最大应力值为 2.684 4×10-3 MPa, 远小于底盘架材 质的屈服强度, 说明结构的动强度性能较好, 不容易产 生疲劳损坏 。采集最大振幅时外激振频率值 294 Hz 状态 下的整个底盘架结构的形变数据, 整个结构体最大变形 量为 7.288 6×10-5 mm, 远小于 0.42 mm 刚度性能判断标 准, 可见其动刚度性能良好 。因此整个底盘架结构设计 合理, 性能稳定且不容易被破坏。
5 结束语
利用 SolidWorks 软件建立钢质壁面作业机器人底盘 架的三维实体模型, 通过 ANSYS Workbench 有限元软件 对底盘架结构进行静力学分析, 计算结果最大变形量为 0.060 975 mm, 最大应力值为 4.838 MPa, 结果表明底盘 架的刚度与强度特性均在材料所能承受范围内, 证明其 能满足在最大负载环境下的安全使用需要。
通过模态分析及谐响应分析, 得到机器人底盘架结 构的前六阶固有频率及位移频率响应, 对指导避免共振 的问题有重要意义; 同时, 模态分析得出的相应振型云 图及结构的主要振型形式, 为提高结构的刚度性能提供 了参考价值。
研究结果表明了底盘架结构设计的合理性和准确性, 良好的静动态特性使得其机械特性得以保证, 同时为机 器人驱动电机选型 、机械臂装置设计提供理论依据, 为 机器人后续设计提供参考。
参考文献:
[1] 辛加旭 . 钢制壁面作业机器人结构设计及优化研究[D]. 青岛: 山东科技大学,2020.
[2] 曾红,魏旭东,冯帆 . 钢板爬壁机器人三角架组合体结构优化 设计[J]. 哈尔滨理工大学学报,2019.24(1):23-28.
[3] 彭上乾 . 垂直攀爬机器人设计与研究[D]. 唐山 : 华北理工大 学,2020.
[4] 王东辉, 张仕海,胡子宇,等 . 海上平台外壁面爬壁除锈机器人 结构设计[J]. 机电工程技术,2021.50(11):54-58.
[5] 朱国柱,郑佳鹏,林佳翰,等 . 基于 ANSYS 的导盲机器人底盘有 限元分析[J]. 机床与液压,2020.48(10):104- 108.
[6] 成大先 ,机械设计手册:单行本 . 机械振动 · 机架设计[M]. 6 版 . 北京: 化学工业出版社, 2017.
[7] 梁攀攀, 吕云朋,石建奎,等 . 随机振动耐久疲劳损伤等效及严 酷度比较研究[J]. 装备制造技术,2022(9):95-99.
[8] 杨东宇,孙振国,姜萍,等 . 基于 ROS 的爬壁机器人控制系统设 计[J]. 机电工程技术,2021.50(8):26-28.
[9] 侯丽嫚 . 矿用液压支架立柱结构特性分析[J]. 机电工程技术, 2020.49(4):190- 192.
[10] 张文辉, 闻志, 游张平,等 . RP 型刚柔机械臂螺栓结合部等效 建 模 及 结 构 特 性 分 析 [J]. 中 国 工 程 机 械 学 报 , 2022. 20(3): 205-210.
[11] 周炬, 苏金英 . ANSYS Workbench 有限元分析实例详解(动力 学)[M]. 北京: 人民邮电出版社, 2019.
[12] 刘习军, 贾启芬, 张素侠 . 振动理论及工程应用[M]. 北京:机 械工业出版社, 2018.
[13] 王新,彭上乾 . 基于 ANSYS 的垂直攀爬机器人结构特性分析 [J]. 机械工程与自动化,2019(6):97-98.
[14] 王水金,茹煜, 陶振洋,等 . 基于 ANSYS Workbench 的高地隙喷 雾机底盘系统的设计及有限元分析[J]. 中国农机化学报 , 2019.40(10):64-71.
[15] 杨天玲, 朱道林, 张海波,等 . 基于 ANSYS 的自动扶梯桁架结构分析及实验研究[J]. 机电工程,2021.38(12):1641- 1646.
[16] 王进,王向坤,扶建辉,等 . 重载机器人横梁结构静动态特性分析与优化[J]. 浙江大学学报(工 学版),2021.55(1):124- 134.
[17] 石凯飞 . 轻型拖车车架设计和静动力学仿真研究[J]. 自动化 仪表,2022.43(8):35-39.
[18] 黄辉,尹华拓, 罗信伟,等 . 承轨台与道床板相对高差对轨道 结构静力学特性影响[J]. 机械设计与制造工程 ,2022.51(7): 24-28.
[19] 赵亚运,李方犁 . 非惯性系下质点动力学问题的研究[J]. 广西 物理,2020.41(4):44-46.
第一作者简介 :梁康养 ( 1981— ), 男, 学士, 实验师, 研究 领域为机械结构动力学特性、结构优化设计, 已发表论文3 篇。 ※通讯作者简介:严 谨 ( 1974— ), 男, 博士, 教授, 博士 生导师, 研究领域为船舶与海洋工程结构动力特性, 已发表论 文 43 篇。
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/65117.html