SCI论文(www.lunwensci.com)
摘要:目前铁路货车转向架检修作业时,减振装置(枕簧与斜楔)需要人工进行拆卸,劳动强度大、耗时长且危险,制约了检修线的工作效率。为推进铁路运维设备自动化智能化转型,基于转向架的拆装步骤以及结构特征,研发了一种转向架斜楔固定机器人,可自动穿过摇枕孔实现对斜楔的固定,代替了人工作业,并设计了机器视觉定位系统,完成转向架上两个摇枕孔的检测定位。用YOLOv3网络作为摇枕孔检测定位的模型,在自定义数据集上对网络模型进行训练,利用训练好的目标检测模型对转向架摇枕孔进行实时定位,实现对机器人的引导控制。在转向架智能拆装实验平台上进行了摇枕孔的定位试验,试验结果表明该方法能够高效、可靠实现摇枕孔的自动定位,对于不同型号转向架,形状不规则的摇枕孔都具有较强的鲁棒性。
关键词:摇枕孔;智能拆装机器人;视觉定位系统;YOLOv3
Design and Research of Vision Positioning System for Wedge Fixed Robot
Sang Yonggang,Ren Shuai
(Baotou Vehicle Maintenance Branch of Guoneng Railway Equipment Co.,Ltd.,Baotou,Inner Mongolia 014060,China)Abstract:At present,during the maintenance of railway freight car bogies,the vibration damping device(pillow spring and wedge)needs to be manually disassembled,which is labor-intensive,time-consuming and dangerous.These factors restrict the working efficiency of the maintenance line.Therefore,to promote the automation and intelligent transformation of railway operation and maintenance equipment,based on the disassembly and assembly steps and structural characteristics of the bogie,a bogie wedge fixing robot is developed,which can automatically pass through the bolster hole to fix the wedge and replace manual work,and a machine vision positioning system is designed to the detect and position the two bolster holes on the bogie.The YOLOv3 network is used as the bolster hole detection and positioning model,the network model is trained on the custom data set,and the trained target detection model is used to locate the bogie bolster hole in real time to realize the servo control of the robot.The positioning test of the bolster hole is carried out on the bogie intelligent disassembly test platform.The results show that the method can realize automatic positioning of the bolster hole efficiently and reliably.For different types of bogies,or irregular shape of the bolster hole,the method shows good robustness.
Key words:bolster hole;intelligent disassembly robot;visual positioning system;YOLOv3
0引言
铁路货车作为铁路提高运输效率的关键运输设备,长期负载行驶在铁路上,需要定期检修来保证车辆的良好运行状态。而转向架直接决定了车辆的稳定性,其检修工作是整个车辆段检修的重要一环。转K2、转K6转向架是我国铁路货车主要装配的转向架,转向架上均有2个摇枕工艺孔和斜楔。检修运维是整个铁路运输过程中的重要一环,而枕簧或斜楔在货车运输过程中如果产生了损伤或者破裂,会对车辆运输的安全造成极大隐患,因此转向架检修是其中的重点,检修时需要将转向架结构分离,将枕簧和斜楔块先后取出并进行后续的损伤检测、更换维护[1]。
目前,当枕簧和斜楔检修完成,对转向架的减振装置进行安装时,通常采用人工搬动的方式取放枕簧斜楔,但是枕簧斜楔的质量都很大,搬运吃力,劳动强度非常大,效率低下,同时容易出现因为手滑、脱力而导致安装过程中出现危险情况。目前市场上成熟的产品较少,相关研究成果不多,文献[2]的专利设计了一整套有关转向架减振装置的系统,其中包括枕簧拆装机械手、斜楔拆装和中转机器人,在斜楔安装时需要一直保持顶升状态直到固定,容易发生干涉。
摇枕孔识别插入的关键技术之一是在复杂工况下实现摇枕孔中心的识别定位,涉及到机器视觉和机器学习技术。随着深度学习技术的不断发展,各种基于深度学习的目标检测算法被提出,以应用比较广泛的目标检测算法为例,可以大致分为两类:(1)two-stage目标检测算法,例如Fast R-CNN、Faster R-CNN,Mask R-CNN[3]等,通常分两个阶段计算,精确度较高,但效率相对低下[4];(2)one-stage目标检测算法,例如YOLO、SSD等,是端到端的目标检测算法,检测速度相对较快,适合在实时检测中使用[5-8]。
基于上述背景,设计自动化、信息化的流程手段,利用智能化设备和算法,实现转向架减振装置的无人拆装是当前车辆段检修车间的亟须解决的问题。论文以转向架的摇枕工艺孔为对象,利用视觉伺服和目标检测相关技术算法,控制机器人代替人工穿过摇枕孔对斜楔进行固定,方便后续的枕簧拆装。本文首先介绍了转向架斜楔固定机器人总体方案,然后介绍了各关键组成模块,最后重点介绍了视觉定位系统的设计以及定位性能试验与验证。
1总体设计方案
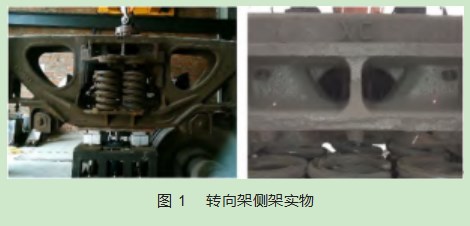
转向架是支撑轨道车辆车体,通过安装减振装置得到良好减振性能的重要部件,对轨道车辆的动力学性能、牵引性能和安全性能起着决定性作用。不同型号的转向架内枕簧数量、摇枕孔定位尺寸均存在差异。以K2转向架为例,每一侧架内部排列有8个枕簧,摇枕顶部空间对称安装有两个斜楔,在斜楔对应位置的摇枕平面有两个摇枕工艺孔。侧架实物如图1所示。
由图1可知,转向架拆卸需要先将两边侧架抬起,使斜楔侧边孔与摇枕工艺孔的位置对齐,进而将斜楔与摇枕的相对位置进行固定,再将侧架落回初始位置,取出枕簧,所有枕簧全部取出后,从摇枕下方空间取出斜楔。安装过程与之类似。
根据转向架的结构特点和检修拆装需求,转向架斜楔固定机器人应满足以下几点目标。
(1)机器人能够独立完成斜楔固定工作,避免了人工接触,防止了可能存在的安全隐患。
(2)机器人能够做到自动识别摇枕孔,并在PLC、工控机等控制器协同控制下完成作业。
(3)机器人能够检测出转向架的型号。
(4)机器人结构能够做到为取装簧预留足够的工作空间。
针对以上要求,利用机械原理、机械设计和机器人学等技术设计出转向架斜楔固定机器人的总体结构方案,如图2所示。
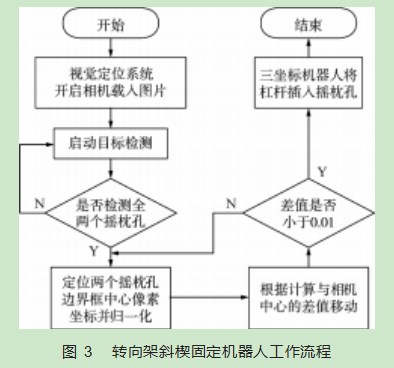
由图2可知,本文提出的智能运维设备由立柱、三坐标步进电动模组和斜楔固定机构组成,装备的工作流程介绍如图3所示。
(1)三坐标伺服电动缸带动斜楔固定机构到达初始点位待机。
(2)PLC发出信号控制视觉定位系统开始定位识别摇枕孔的图像坐标,在判断识别到两个摇枕孔后,将图像坐标进行归一化处理。
(3)分别计算两个摇枕孔中心的归一化坐标与相机视场中心的差值,反馈给PLC进行移动。
(4)将第(2)步和第(3)步迭代运行,直到摇枕孔中心的归一化坐标与相机视场中心的差值小于0.01后,得到并反馈两个摇枕孔世界坐标精确值,由PLC控制三坐标机器人接近侧架,随后精定位将气缸卡爪插入摇枕孔。
2主要组成模块
2.1三坐标步进电动模组
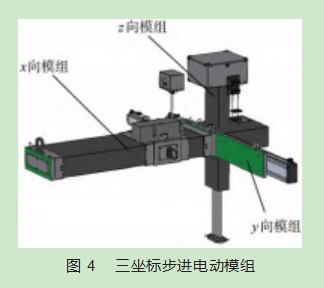
因拆装枕簧的过程中转向架斜楔固定机器人需要与用于取装枕簧的六轴机器人配合,为防止斜楔固定机器人与六轴机器人在工作过程中发生干涉,需要机器人的工作范围与六轴机器人尽量错开,同时需要机器人能以合适的姿态到达摇枕孔的位置,因此选择了直角三坐标形式的机器人,xyz三个方向均通过步进电机与滚珠丝杠实现精确控制[9],并加上了限位开关保护安全,三坐标步进电动模组如图4所示。
2.2斜楔固定机构
以斜楔固定机器人的工作需求为考虑,设计了两个对称的气缸卡爪,如图5所示。
由图可知,气缸卡爪由气缸、L形杠杆和滚珠丝杠等组成,在三坐标步进电动模组实现初步粗定位后,进行杠杆位置的精定位。气缸卡爪的工作流程如下[10]。
(1)两边L形杠杆在步进电机和滚珠丝杠的调整下,根据视觉系统反馈数据对齐摇枕孔。
(2)杠杆前进插入后,气缸下翘,在循环动作两次后顶起斜楔,完成固定。
3视觉系统设计
本文采用机器视觉方法实现摇枕孔的自动定位,通过定位机构带动相机对摇枕孔进行拍照,利用YOLOv3目标检测算法对照片进行定位模型训练,获取摇枕孔的准确位置。
3.1 YOLOv3算法
YOLO算法是一种采用回归策略的端到端目标检测算法。该算法舍弃了生成候选框,通过仅“看一眼”就可以获得回归位置信息和类别信息。YOLO算法的实现原理是:假设将一幅图像划分为S×S个网格,如果检测目标的中心落在网格中,则需要对检测目标所在的具体位置进行估计[11]。
如今,YOLO算法经过一系列提升,在保留了原有优点的基础上,进行了一系列的创新优化[12]。
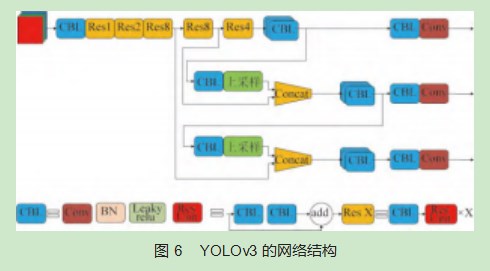
YOLOv3使用一个新的网络来执行特征提取。新网络是YOLOv2、Darknet-19中使用的网络和残差网络之间的混合方法。这一网络使用连续的3×3和1×1卷积层,但现在也有一些快捷连接,并且明显更大。这个新网络比Darknet19强大得多,但仍然比ResNet-101或ResNet-152更有效。Darknet-53的性能与最先进的分类器相当,但浮点运算更少,速度更快。Darknet-53比ResNet-101好,快1.5倍。Darknet-53的性能与ResNet-152相似,速度快2倍。Darknet-53还实现了每秒最高测量浮点运算。这意味着网络结构更好地利用了GPU,使其评估效率更高。而这主要是因为ResNet的层太多并且效率不高[13]。
YOLOv3的网络结构如图6所示。
3.2模型训练
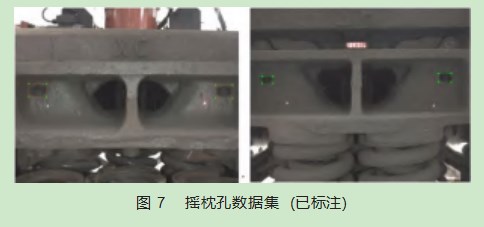
摇枕孔目标检测训练使用自定义的数据集,数据集囊括了不同状态下的摇枕孔图片,包括了不同的光照条件、转向架型号以及拍摄角度等相关因素。利用图片标注工具LabelImg对训练数据集中的图像进行逐一标注,并将标注结果作为YOLOv3模型的训练样本。标注完的摇枕孔数据集样本如图7所示。
相关模型的训练在实验室工作站上进行,工作站主要配置:CPU使用i5-11900,GPU使用GeForce RTX 3070ti,使用10.2版本的CUDA,选择Pytorch作为深度学习框架。将训练所得的目标权重用于视觉伺服过程中输入图像流的目标检测,从而实现实时目标定位的目的。
3.3试验分析
3.3.1算法性能对比
由于检测对象摇枕孔,不同转向架之间摇枕孔形状相似,因此也可以选择使用模板匹配尝试。模板匹配是寻找一个特定目标的方法之一,将一张模板图像匹配在源图像最相似的位置,在OpenCV中通过matchTemplate()函数实现,共有6种匹配模式。这种算法的优点是在固定条件下,能够简单快速地识别目标,局限性是只能进行平行移动,若匹配目标的明暗、位姿或大小发生了改变变化,该算法便无法达到匹配效果[14]。
本文方法选择使用YOLOv3算法进行图像平面的粗定位后使用一系列图像处理方法,包括二值化、高斯滤波,最后找出摇枕孔轮廓的最大内切圆,而最大内切圆的圆心坐标也就是摇枕孔的几何中心坐标,实现了精定位[15]。
为了验证不同算法对摇枕孔的适应性,采用模板匹配和YOLOv3两种算法对摇枕孔进行识别与检测。
3.3.2结果分析
试验平台由转向架斜楔固顶机器人、PLC控制系统和转向架等组成,如图8所示。
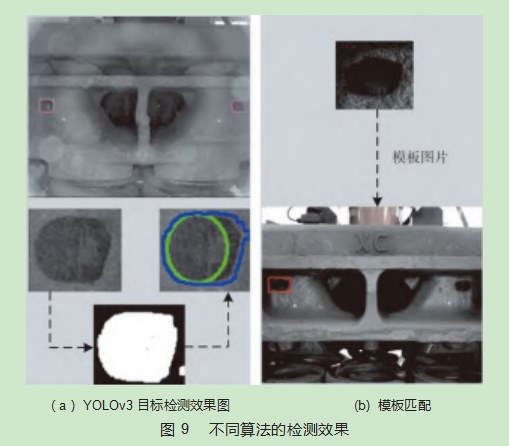
试验时,通过PLC控制三坐标机器人带动相机依次对摇枕孔拍照。以K6转向架作为样本。为了展示不同算法的特点与优势,进行了YOLOv3算法和模板匹配特征提取算法的对比,观察相同条件下摇枕孔检测的效果,结果如图9所示。以5副转向架作为试验对象设置了4组对比实验,每组进行了5批,其中每批进行50次的重复试验。为了定量不同检测方法的实际性能,选取合适的、具有代表性的评估指标具有重要意义。
由图9(a)可知,本文提出的基于YOLOv3的精处理算法不仅能够实现对两孔的完全检测,还能实现对摇枕孔几何中心的精确定位,兼具了稳定性以及准确性。
由图9(b)可知,模板匹配对于摇枕孔特征识别的鲁棒性不足。由于转向架在行车吊装控制下可能存在一定的偏转误差导致工业CMOS相机与两个摇枕孔的距离不相同,模板匹配算法也会由于图像中目标大小不同导致特征匹配失败,或者由于摇枕孔铸造或使用过程中的磨损造成孔的大小形状与模板图片不同,容易出现误检现象。
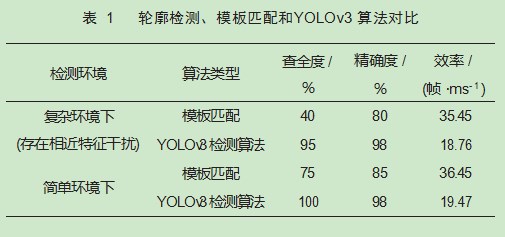
考虑到摇枕孔检测定位具体应用场景下模型进行落地部署时主要受限于硬件设备的低算力、低内存以及较高的检测定位推理效率等要求,本文选取查全度、精确度以及每帧推理耗时3项指标来进行性能评估对比,如表1所示。从表可以看出无论是在复杂环境下还是简单环境下,基于YOLOv3的精处理算法在查全度、精确度以及效率上都有着巨大的优势,而模板匹配受背景其他近似特征影响大容易误检漏检,精确度也存在不足。
4结束语
本文基于铁路货车转向架检修作业时,减振装置(枕簧与斜楔)人工进行拆卸时,劳动强度大且危险,同时效率也相对低下等问题,设计研发了一种转向架斜楔固定机器人,能够自动对摇枕孔位置进行识别与定位。
转向架斜楔固定机器人由立柱、三坐标步进电动模组和斜楔固定机构组成,具有自动化程度高、灵活以及适应能力强等特点。
基于YOLOv3算法在自定义数据集上进行训练,结果所得权重用于摇枕孔的精确定位。试验结果表明,与模板匹配算法相比,基于YOLOv3的摇枕孔检测模型具有检测精度高、鲁棒性好、体积小和速度快等优点,能有效解决摇枕孔的自动定位问题,从而辅助实现斜楔的智能拆装。
参考文献:
[1]李书杰.铁路货车转向架弹簧拆卸系统的设计与分析[D].北京:北京交通大学,2021.
[2]邵绪勇,唐晓文,王昌华,等.一种转向架枕簧智能拆装装置:中国:CN214558900U[P].2021-11-02.
[3]GIRSHICK R,Fast R-CNN[C]//Proceedings of the IEEE Interna⁃tional Conference on Computer Vision.New York:IEEE,2015:1440-1448.
[4]GIRSHICK R,DONAHUE J,DARRELL T,et al.Rich feature hi⁃erarchies for accurate object detection and semantic segmenta⁃tion[C]//Proceedings of the IEEE Conference on Computer Vi⁃sion and Pattern Recognition.New York:IEEE,2014:580-587.
[5]REDMON J,DIVVALA S,GIRSHICK R,et al.You Only Look Once:Unified,Real-Time Object Detection[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recogni⁃tion.New York:IEEE,2016:779-788.
[6]罗元,王薄宇,陈旭.基于深度学习的目标检测技术的研究综述[J].半导体光电,2020,41(1):1-10.
[7]陈科圻,朱志亮,邓小明,等.多尺度目标检测的深度学习研究综述[J].软件学报,2021,32(4):1201-1227.
[8]王正旭,王秋力.基于YOLOv3的前车行驶状态识别与预警技术研究[J].机电工程技术,2022,51(12):73-77.
[9]姜帅,刘瀛,胡俊宏,等.基于PLC的直角坐标机械手系统设计[J].工业仪表与自动化装置,2021(2):17-20.
[10]王建军.搬运机械手仿真设计和制作[J].机械设计与制造,2012(9):146-148.
[11]REDMON J,FARHADI A.YOLO9000:better,faster,stronger[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition.New York:IEEE,2017:7263-7271.
[12]REDMOND J,FARHADI A.YOLOv3:An incremental improve⁃ment[J].arXiv preprint arVix:1804.02767,2018.
[13]许冠,詹金峰.基于YOLOv3改进的手势检测算法[J].机电工程技术,2021,50(6):1-5.
[14]黎松,平西建,丁益洪.开放源代码的计算机视觉类库OpenCv的应用[J].计算机应用与软件,2005(8):134-136.
[15]秦小文,温志芳,乔维维.基于OpenCV的图像处理[J].电子测试,2011(7):39-41.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网! 文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/65005.html