SCI论文(www.lunwensci.com)
摘要:为确保某旋翼飞行无人平台上拟安装的多杆机械臂的承载能力和振动特性满足要求, 基于 ANSYS 软件对机械臂应力、变形 以及固有振动频率、振型等进行静力学分析和预应力模态分析。结合机械臂实际使用场景, 选取地面探高、空中俯视以及极限 45° 前倾 3 种不同位姿工况分别进行仿真计算, 同时考虑机械臂末端可能搭载不同任务载荷, 研究了末端载荷质量对强度和模态的影 响规律。静力学分析结果表明: 空中俯视位姿工况机械臂应力较另两种位姿工况要大很多, 最大应力为 111.37 MPa, 位于机械臂 小臂靠近中关节位置, 末端变形量最大为 4.59 mm, 在设计指标允许范围之内。模态分析结果表明: 机械臂振动频率与位姿及末端 负载质量有关, 不同位姿工况时机械臂固有振动频率不同, 且随着末端负载质量增加, 各阶次固有振动频率呈下降趋势, 前 4 阶 固有振动频率处于旋翼高速运转产生的激振频率区间, 实际使用时机械臂有可能发生共振现象, 建议提高旋翼工作转速, 从而避 免共振发生。
Research on Strength and Vibration Characteristics of a Rotorcraft UAV Manipulator Based on ANSYS
Si Dongya, Yu Kaiping, Chen Xiangchun, Yan Jun
(Department of Mechanical Engineering, Army Academy of Artillery and Air Defense, Hefei 230031. China)
Abstract: In order to ensure that the bearing capacity and vibration characteristics of the multi-link manipulator to be installed on a rotorcraft flying platform meet the requirements, static analysis and prestress modal analysis of the stress, deformation, natural vibration frequency and vibration mode of the manipulator are carried out based on ANSYS. Combined with the actual application scenario of the manipulator, three different position and posture conditions are selected for simulation respectively, namely ground probing height, aerial overlooking and limit 45° forward tilt. Meanwhile, considering different task loads may be carried on the end of the manipulator, the influence law of the end load weight on the strength and mode is studied. The results of statics analysis show that the stress of the manipulator under the aerial overlooking pose condition is much larger than the other two pose conditions, the maximum stress value is 111.37 MPa, which is located near the middle joint of the forearm of the manipulator, and the maximum end deformation is 4.59 mm, which is within the allowable range of the design index. The modal analysis results show that the vibration frequency of the manipulator is related to the pose and the end load weight, the natural vibration frequency of the manipulator is different under different pose conditions; with the increase of the end load mass, the natural vibration frequency of each order shows a downward trend; the first four order natural vibration frequencies are in the range of vibration frequency generated by the high-speed operation of the rotor, so the manipulator may have resonance phenomenon in actual use . It is suggested to increase the rotor working speed to avoid resonance.
Key words: multi-link manipulator; rigid-flexible coupling; position and pose; pre-stressed mode; inherent frequency
0 引言
旋翼飞行机械臂是由旋翼无人机 (多旋翼无人机或无人直升机) 和多连杆机械臂组成的新型飞行机器人系统, 它结合了旋翼无人机的机动飞行、定点悬停和机械 臂灵活作业的特性[1], 在未来战场中具有广泛的应用前景, 例如, 机械臂末端可搭载侦察引导载荷、激光雷达等, 使无人机具备空地全方位侦察引导打击能力, 搭载不同任务载荷还能完成危险环境中战场救护、排爆、设施设备维护等任务。
旋翼飞行机械臂的研究工作虽然在近几年刚刚兴起,但却吸引了大量国内外相关领域的学者, 国内外对旋翼飞行机械臂的研究工作涵盖了旋翼飞行机械臂系统设 计[2-5]、动力学建模[6-8]、运动控制[9- 13] 以及应用场景探 索[14] 等, 逐渐成为飞行机器人领域的研究热点问题。受限于无人机升力及其搭载载荷能力, 飞行机械臂通常要具备自重轻、负载自重比大、强度高等特性, 机械臂轻量化设计问题也越来越受到重视, 如胡永丽等[15]采用复 合材料来作为无人机载仿生双臂机器人的臂杆材料。
本文机械臂主体结构 (大臂和小臂) 拟采用轻质碳 纤维管作为臂杆材料。基于有限元分析软件 ANSYS 对该 机械臂进行多工况的静力学和模态分析, 结合机械臂实 际使用场景, 选取地面探高、空中俯视以及极限 45°前 倾 3 种不同位姿工况分别进行仿真计算, 同时考虑机械 臂末端可能搭载不同任务载荷, 研究末端载荷对强度和 模态的影响规律, 以确保该机械臂的承载能力和振动特 性满足要求。
1 机械臂结构设计
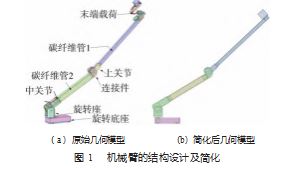
在进行机械臂的结构设计时, 以负载自重比大、自 重轻、高输出功率和大工作空间等为设计目标, 通过综 合计算比较, 将其设计为三关节型 (RRR) 构型。该构 型 3 个连杆分别称为机体 (旋转座)、大臂 (碳纤维管 2) 和小臂 (碳纤维管 1), 3 个关节分别为底座关节、中关 节和下关节, 均为旋转关节。利用 SolidWorks 软件建立 该机械臂三维几何模型, 如图 1 ( a ) 所示。侦察引导载 荷可安装于机械臂桅杆顶端, 机械臂末端可达工作空间 为 45°~135°, 活动空间大。
机械臂零部件多、结构复杂, 会造成后续网格划分 困难, 影响求解效率, 因此, 采用 ANSYS 前处理模块 SCDM 进行几何模型简化, 精简非关键结构, 保留末端 载荷、碳纤维管 1、下关节、连接件、碳纤维管 2、中关 节、旋转座、旋转底座等关重件, 如图 1 (b) 所示。机 械臂搭载的任务载荷安装于机械臂桅杆顶端 (碳纤维管 1 末端), 结构分析时对不同任务载荷进行质量等效处 理, 即在体积一定的情况下, 通过改变材料密度来改变 负载质量。
2 机械臂静力学分析
机械臂静力学分析的目的就是在产品物理样机实际 加工制造之前, 通过有限元数值模拟仿真的方法, 对结 构的承载能力进行分析, 确保机械臂关键结构在不同工 作状态 (位姿) 下其实际最大应力值低于材料的结构强 度。同时, 机械臂在工作过程中自身变形量对整体结构 的动态特性和定位精度也有很大的影响, 为防止局部失稳, 须确保机械臂不发生大的弯曲变形[9]。该机械臂在 静止状态下主要承载的是自身重力载荷, 搭载不同质量 的任务载荷, 机械臂结构的应力场和变形量也会不同。 通过 ANSYS 静力学分析得出不同位姿工况下的机械臂最 大应力和最大变形量, 以此来验证其结构是否可靠。
2.1 位姿工况选取
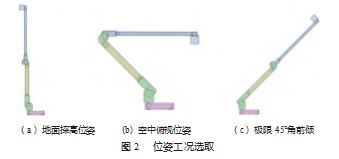
根据机械臂本体结构和控制驱动系统规定的技术指 标要求, 机械臂底座关节可旋转 360°, 下关节可控制大 臂完成 0°~135°运动, 其中 45°~135°为工作空间, 中关节 可以控制小臂在 0°~90°内运动。因此, 机械臂极限位姿 选取以下 3 种典型工况: 地面探高、空中俯视、极限 45° 角前倾, 如图 2 所示。
利 用 ANSYS 的 静 力 学 结 构 分 析 模 块 ( static struc ⁃ ture) 对以上 3 种位姿工况下的应力和变形情况分别进行 计算求解, 并结合材料性能对其进行强度校核。
2.2 有限元建模
( 1 ) 网格划分。因需要重点关注两个细长碳纤维杆 即机械臂大臂和小臂的承载能力, 静力学分析时采用刚 柔耦合的方法, 除了两杆之外的其他部件都做刚体处理, 刚体不考虑变形, 不用划分网格, 这样可以极大地提高 分析效率。两个碳纤维杆形状规则, 故采用六面体网格 进行划分, 单元尺寸为 2 mm。
( 2) 接触定义。静力学分析时机械臂在不同位姿工 况各构件之间保持相对静止, 构件之间可以简化为绑定 接触 (Bonded)。
( 3) 载荷及约束。静力学分析施加的载荷主要为机 械臂自身重力 (沿-Y方向), 旋转底座与 GROUND 之间 施加固定约束 (fixed support)。
2.3 仿真分析结果
2.3.1 应力分析
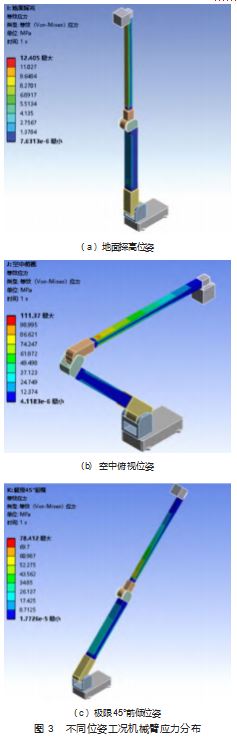
图 3 所示为静力学刚柔耦合分析结果。由图可知, 不同位姿工况, 机械臂应力分布明显不同, 主要体现在: ( 1) 地面探高位姿时, 机械臂处于竖直状态, 大臂和小 臂主要承受压应力, 最大应力仅为 12.4 MPa, 末端载荷 集中在机械臂末端左侧位置, 因而机械臂左侧应力值高 于另一侧, 沿臂杆长度方向应力分布较均匀; ( 2) 空中 俯视位姿时小臂处于水平状态, 机械臂应力最大值为111.37 MPa, 位于机械臂小臂靠近中关节位置; 应力分 布方面, 沿机械臂臂杆长度方向, 靠近中关节处应力值 明显高于其他位置; 同时, 机械臂上表面主要承受拉应 力, 下表面主要承受压应力, 机械臂上、下表面的应力 高于中间位置; ( 3) 极限 45°前倾位姿工况, 机械臂应 力介于前两种位姿之间, 应力最大值为 78.4 MPa。
综上所述, 2 种位姿工况下应力最大的为空中俯视 位姿工况, 最大值为 111.37 MPa, 但该应力值远小于碳纤维管的抗拉强度和抗压强度, 机械臂的静强度满足设 计要求。
2.3.2 变形量分析
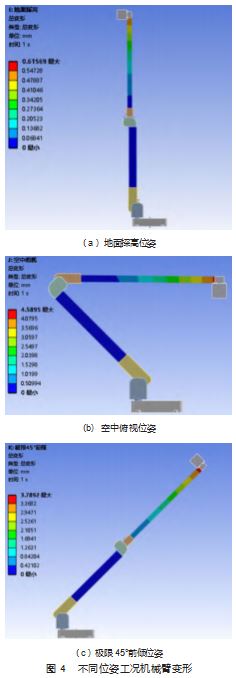
机械臂变形量分布如图 4 所示。由图可知, 地面探 高位姿时, 机械臂处于竖直状态, 末端变形量最大为 0.6 mm ;空中俯视位姿时小臂处于水平状态,机械臂末端 变形量最大为 4.59 mm; 极限45°前倾位姿工况, 机械臂 机械臂末端变形量介于前两种位姿之间, 最大为3.79 mm。
以上 3 种位姿工况下末端变形量最大的为空中俯视 位姿工况, 变形量最大为 4.59 mm, 总体变形量相对较 小, 能够满足设计要求。
2.3.3 末端负载对机械臂应力和变形量的影响
针对应力大小和变形量均最大的空中俯视位姿进行 进一步分析。通过改变机械臂末端简化几何体的密度来 改变其质量, 模拟机械臂搭载不同任务载荷的情况。不 同末端负载下应力和变形量对比如表 1 所示。由表可知, 末端搭载不同质量任务载荷时, 机械臂应力以及变形量 随负载质量增加线性增加, 结合碳纤维材料抗拉强度 (约 800 MPa) 进行插值计算, 末端能承受的最大负载质 量约为 168 kg, 但是实际机械臂末端可负载的任务载荷 质量还需考虑四旋翼升力、关节电机输出扭矩以及结构 惯性、变形等限制因素的影响。碳纤维机械臂机械强度 远高于设计任务载荷及自身质量产生的应力, 说明该机 械臂结构强度能够满足要求。
3 机械臂模态分析
模态分析是动力学仿真的基础, 对于提高机械臂整 体的稳定性等具有实际意义。本文通过对机械臂整体结 构及关键部位进行模态分析, 可以用来预测机械臂结构 与外源激励发生相互作用产生共振的可能性, 如无人飞 行平台螺旋桨高速旋转时产生的周期性振动激励, 进而 通过结构的合理设计与操作使用来避免共振。实际工作 中, 机械臂在自身重力作用下存在预应力, 末端搭载不 同质量任务载荷时, 机械臂中预应力大小也不相同, 所 以对其进行模态分析时采用预应力模态分析这种分析 类型。
3.1 不同位姿工况机械臂预应力模态分析
提取机械臂处于不同位姿时的前 6 阶模态进行对比, 得到不同阶次的固有振动频率和振型, 如表 2 所示。
已知该无人飞行平台螺旋桨的最大转速为4 450 r/min, 作为激励源, 其振动频率最大约为 75 Hz。对照不同位姿 时机械臂不同阶次的固有振动频率可以发现, 前 4 阶模态时机械臂固有振动频率有可能与激励源振频一致, 从 而容易产生共振。因此, 当该旋翼无人机低于最大转速 (即 4 450 r/min) 运行时, 其旋翼转速需要避开共振频 率, 以免因振幅过大而失稳。
通过计算同样得到了机械臂不同位姿时前 6 阶振型, 限于篇幅不再详细列出。通过振型图可以看出, 该机械 臂前 3 阶振型均以弯曲变形为主, 第 4 阶振型出现了扭转 的情况, 后续振型多为弯扭复合, 小臂根部及中部弯曲 幅度较大, 结构设计时需要重点关注。
3.2 末端负载对预应力模态的影响
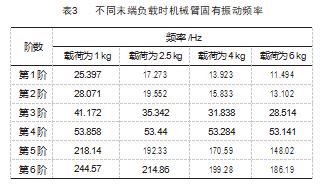
实际使用时机械臂末端也有可能搭载不同质量的任 务载荷,下面分析计算不同末端负载对预应力模态的影响 规律。以空中俯视位姿工况为例, 计算 4 种不同末端负载 下的机械臂预应力下的固有振动频率, 结果如表 3 所示。
从振动频率上看, 随着末端负载质量增加, 各阶次 固有振动频率呈现下降趋势, 说明末端负载质量改变, 机械臂内部应力也随之发生变化, 应力对刚度产生影响 进而导致固有频率的变化, 前 4 阶固有振动频率仍然均 在激励源振频范围之内, 容易产生共振, 5 阶及以上振 动频率高于旋翼产生的激振频率, 不会产生共振现象。
4 结束语
本文基于 ANSYS 软件对某旋翼飞行多杆机械臂在不 同位姿工况和搭载不同任务载荷时的强度和振动特性进 行了仿真分析, 得到了其应力、变形量以及固有振动频 率、振型载荷特性。刚柔耦合静力学分析结果表明: 机 械臂不同位姿工况下, 其应力和变形量分布也不同, 当 机械臂处于空中俯视位姿时应力和变形量均最大, 分别 为 111.37 MPa 、4.59 mm, 应力低于材料抗拉强度极限, 机械臂承载能力满足要求。模态分析分析结果表明: 不 同位姿时机械臂各阶次固有振动频率均随着末端负载质 量增加而呈下降趋势, 当旋翼低于最大转速运行时, 有 可能与机械臂产生共振而失稳, 使用时需注意避开。
参考文献:
[1] 刘超, 张广玉, 熊安斌 . 旋翼飞行机械臂研究综述[J]. 高技术通讯,2020.30(7):735-747.
[2] 周祖鹏, 睢志成,莫小章,等 . 带机械臂的旋翼无人飞行系统实 验平台设计与实现[J]. 现代电子技术,2022.45(6):119- 124.
[3] 苏华勇, 李海艳 . 机械臂系统的动力学建模与分析[J]. 机电工 程技术,2020.49(7):120- 122.
[4] 高军 , 邬江 . 无人机排爆机械臂的设计与实现[J]. 科技传播 , 2018.10(22):164- 165.
[5] 何慰,方勇纯, 梁潇,等 . 一种两自由度飞行机械臂系统的设计 与实现[J]. 航空学报,2021. 42(2):264-274.
[6] 卫欢 . 带机械臂的四旋翼无人机动力学建模与控制方法研究 [D]. 桂林:桂林电子科技大学,2021.
[7] 丁力, 吴洪涛,李兴成,等 . 旋翼飞行机器人的结构设计与动力 学建模研究[J]. 组合机床与自动化加工技术,2018(9):4-7.
[8] 熊靖丰,胡士强 . 带单关节机械臂四旋翼无人机的建模与控制 [J]. 计算机仿真,2020.37(5):65-70.
[9] 帅俊 . 面向飞行机械臂的无人机悬停控制研究[D]. 哈尔滨:哈 尔滨工业大学,2021.
[10] 荆琦 . 旋翼飞行机械臂抓取控制研究[D]. 绵阳 : 西南科技大学,2020.
[11] 陈宝,周祖鹏,卫欢,等 . 基于专家 PID 的带臂四旋翼无人机控 制方法[J]. 计算机应用, 2022.42(8):2637-2642.
[12] 康骥南 . 面向旋翼飞行机械臂的自抗扰控制方法研究[D]. 天 津:天津大学,2019.
[13] 曹章 . 双机械臂旋翼飞行器目标识别与抓取方法研究[D]. 湖 南大学,2020.
[14] 周前飞,丁树庆,王会方,等 . 基于旋翼飞行机械臂的在役大型 金属结构智能检测系统研究[J]. 机电工程技术,2018.47(11): 107- 111.
[15] 胡永丽 . 无人机载仿生双臂机器人设计及运动学、动力学 研究[D]. 哈尔滨:哈尔滨工业大学,2019.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/64859.html