SCI论文(www.lunwensci.com)
摘要:在使用腔镜手术机器人手术过程中, 在手术器械钳端及腕部之间放置六维微型力/力矩传感器能够将手术器械与组织间的交 互作用力反馈给医生, 但目前缺少针对六维微型力/力矩传感器的静态标定平台。为满足六维微型力/力矩传感器的静态标定要求, 设计了一种基于砝码施力的六维微型力/力矩传感器静态标定平台并制作原理样机。给出了结构设计、规划了6 个方向上的加载方 式并分析了一类误差和二类误差, 分析结果表明: 六维微型力/力矩静态标定平台能够分别对传感器 6 个方向稳定施加最大 10 N 及 150 N·mm 的力/力矩, Ⅰ 类误差不大于 1.307% 、 Ⅱ类误差不大于 1.85%, 满足六维微型力/力矩传感器静态标定的要求。
Design of Static Calibration Platform for Six-dimensional Miniature Force/Torque Sensor
Zhuo Yue, Li Keqiang, Fu Hang, Sun Xuezhuang, Li Lei, Li Kun
(School of Mechanical and Electronic Engineering, Shandong Jianzhu University, Jinan 250101. China)
Abstract: In the process of using endoscopic surgical robots for surgery, placing a six dimensional miniature force/moment sensor between the forceps clamp end and the wrist can provide feedback on the interaction force between the surgical instrument and the tissue to the doctor . Currently there is a lack of static calibration platforms for six dimensional miniature force/moment sensors . To meet the static calibration requirements of six dimensional miniature force/moment sensors, this paper designed a static calibration platform for six dimensional miniature force/moment sensors based on force applied by weight and made a prototype . The structure of the platform was designed, the loading mode in six directions was planned, and the type I error and type II error were analyzed. The results show that the six dimensional micro force/torque static calibration platform can stably apply a maximum force/moment of 10 N and 150 N ·mm in six directions of the sensor, with Class I errors not exceeding 1.307% and Class II errors not exceeding 1.85%, meeting the requirements for static calibration of six dimensional micro force/ torque sensors.
Key words: endoscopic surgery robot; six-dimensional miniature force/moment sensor; static calibration platform; mechanical structure design; error analysis
0 引言
医生将微创手术器械通过鞘套插入患者体内开展手 术, 但由于手术器械缺少力检测功能以及自身自由度的 限制, 医生无法准确感知器械末端与患者组织的交互作 用力, 力反馈受到影响。主从式微创手术机器人系统旨 在解决这一问题, 但目前在临床上还很难实现。为实现 力检测与力反馈, 六维微型力/力矩传感器的应用变成了 解决问题的关键。微创手术的精密性对传感器的静态特 性指标提出了非常严格的要求, 需要通过标定平台对传 感器进行标定。最常用的是基于最小二乘法计算标定矩 阵从而实现维间解耦。目前国内缺少符合该要求的标定 装置, 因此设计一台针对手术器械进行标定的平台至关 重要[1]。
R Haslinge[2]等设计了一台用于标定光纤传感器的装置, 连接砝码的细绳借助加载杆将力施加于传感器, 通 过合理使用加载杆, 可以施加不同方向的力和力矩, 但 平台可调节性较差。张晓辉[3]研究了一种六维力传感器 静态标定装置, 采用了滑轮砝码结构, 加载法码的精度 为 100 g 且方便 6 个方向正反方向的加载, 但其结构较 小, 不适用于腔镜手术机器人力感知手术器械的整体标 定。蔡大军[4]研究了一款重型并联六维力传感器的静态 标定装置, 通过六维力测量台将砝码产生的拉力施加到 六维力传感器上, 但结构过大精度较低。贾振元[5]设计 了压电式六维力/力矩传感器标定实验台, 该实验台的机 械加载装置可以产生最大力值为 200 kN 的力源, 因此该 标定平台可满足大量程的标定, 但加载方式单一, 无法 保证微小量程。孙永军[6-7]设计了六维力/力矩传感器的 静态标定系统, 该系统主要由试验台基座、试验台、加载系统、通信系统、计算机等组成, 但结构过大, 不适 用于微型化传感器。郑红梅[8-9]设计并制造了腕力传感器 的标定装置, 实验台由工作台、横梁、各个方向的支架 等组成, 工作台的水平度可通过工作台支脚上的调整螺 栓和螺母进行调整以保证标定力施加方向的准确性。俞 阿龙[10- 11]研究了一种腕力传感器的静态标定装置, 该标 定装置包括实验台基座、分度盘、加载系统, 力源式加 载方式最大可以产生 200 kN 的力, 但不适于六维微型力/ 力矩传感器的标定。付立悦[12- 13]设计了一款针对六维力 传感器的静态标定装置, 此装置基于龙门架结构通过设 置回转工作台以及定滑轮对六维传感器进行静态标定, 但不满足六维微型力/力矩传感器的测量精度。王宣银[14] 设计了一款用于六维力/力矩传感器的多功能加载装置, 通过十字加载坐标架以及支撑框架通过绳索将砝码力加 载到传感器上, 结构稳定, 但加载量程过大, 不适用于 微型力/力矩传感器的静态标定。王娜君[15] 和廖连杰[16]分 别研究了一种六维力/力矩传感器静态标定实验的加载方 法和装置, 力的大小可通过测力环读出, 但该方法精度 较低。因此, 目前国内外多数设计的标定平台的加载系 统采用砝码施力。
本文提出了用于标定腔镜手术机器人力感知手术器 械中的六维微型力/力矩传感器的静态标定平台, 该标定 平台采用夹紧装置将手术器械固定在标定平台上, 在手 术器械顶部固定加载帽, 加载帽上设有中心加载杆和径 向加载孔, 并在标定平台上设置绕线的滑轮杆, 悬挂砝 码的细线另一端系在加载杆或径向加载孔中, 实现力/力 矩的加载, 并对标定平台进行误差分析, 对该标定实验 的合理性进行验证。本文完成了传感器静态标定平台的结构设计、三维建模、误差分析、原理样机的加工。
1 六维微型力/力矩传感器标定平台结构设计
六维微型力/力矩传感器标定平台由主工作台、加载 系统、基座、调整装置和夹紧装置等组成。
1.1 静态标定平台设计要求
标定平台应能够对待标定的传感器施加 3 个方向的 力和力矩; 传感器在 x 、y 、z 方向上的力和力矩监测范围 要达到 10 N 和 150 N ·mm, 因此在此范围内进行标定, 并尽可能覆盖此范围; 由于制造、装配等原因, 紧固后 的传感器实验轴可能发生倾斜, 应能保证实验轴与标定 平台主工作台的垂直度, 从而保证力施加方向的准确性; 标定平台主工作台的高度应能够调节以适应不同长度的 传感器。
1.2 结构设计
标定平台由主工作台、调整装置、夹紧装置、加载 系统和基座等组成。
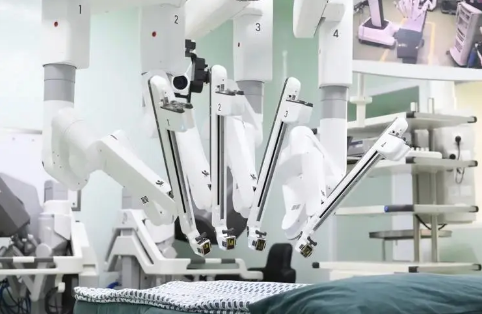
主工作台结构如图 1 所示, 在主工作台上设有 8 个安装槽, 主工作台的一侧设有与升降杆滑动配合的燕尾槽。 主工作台表面粗糙度轮廓的算术平均偏差值为 6.3 μm, 与其他零件配合的地方其表面粗糙度轮廓的算术平均偏 差值为 3.2 μm, 以保证装配精度。
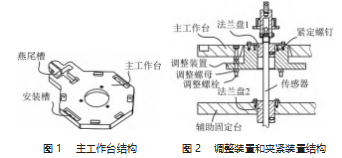
调整装置和夹紧装置结构如图 2 所示, 调整装置与 主工作台通过调整螺栓连接, 通过调节调整螺母改变传 感器的空间位置, 修正实验轴与主工作台的垂直度。夹 紧装置包括法兰盘 1、法兰盘 2 和辅助固定台, 传感器由 法兰盘 1 和法兰盘 2 中的紧定螺钉来固定。辅助固定台可 防止传感器晃动, 实现多点固定。
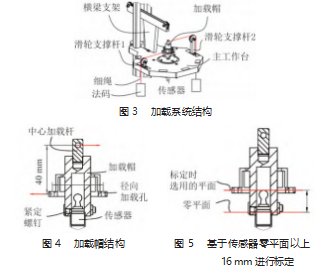
加载系统如图 3 所示, 包括定向滑轮杆、横梁支架、 滑轮、加载帽以及细绳、砝码等。加载帽上设有中心加 载杆和径向加载孔, 其结构如图 4 所示, 加载帽内部由 紧定螺钉固定在传感器上。加载帽力臂长度为 40 mm。 细绳连接校准的砝码, 通过滑轮定向到中心加载杆或径 向加载孔中, 通过在一个或多个引脚上安装砝码, 可以 施加不同的力和力矩载荷。标定时所选用的平面是基于 传感器零平面以上 16 mm, 如图 5 所示, 在此平面进行 砝码的加载和卸载。
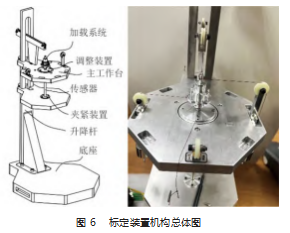
基座包括底座和升降杆, 升降杆与上述主工作台的 燕尾槽滑动配合, 可根据传感器的尺寸对主工作台的高 度位置进行调节。根据本节所述机构, 将标定装置的各 个部分进行集成, 图 6 所示为标定装置机构。
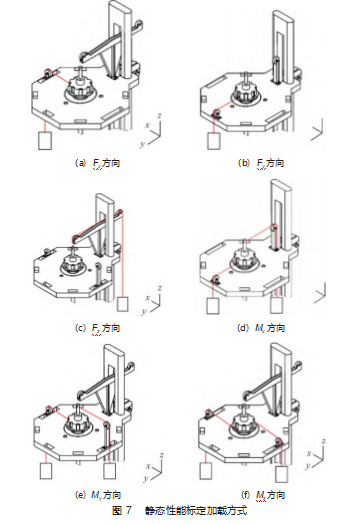
1.3 静态标定加载方式
在对正方向进行标定时, 如图 7 (a) 所示, 此时, 滑轮支撑杆 1 位于如图位置的安装槽中, 尼龙绳由加载 帽的径向加载孔引出, 绕过滑轮支撑杆 1 上的滑轮, 悬 挂一定质量的砝码。当需要对负方向施加力时, 将滑轮 支撑杆 1 置于相对的安装槽中即可。
在对正方向进行标定时, 如图 7 (b) 所示, 此时, 滑轮支撑杆 1 位于如图位置的安装槽中, 尼龙绳由加载 帽的径向加载孔引出, 绕过滑轮支撑杆 1 上的滑轮, 悬 挂一定质量的砝码。当需要对负方向施加力时, 将滑轮 支撑杆 1 置于相对的安装槽中即可。
在对正方向进行标定时, 如图 7 (c) 所示, 尼龙绳 由加载帽中心加载杆的孔中引出, 绕过横梁支架上的两 个滑轮, 悬挂一定质量的砝码。当需要对负方向施加力 时, 只需将砝码加在加载帽上即可。
在对正方向进行力矩标定时, 如图 7 (d) 所示, 将 滑轮支撑杆 1、滑轮支撑杆 2 分别置于主工作台如图位置 的安装槽中, 借助滑轮支撑杆 1 和滑轮支撑杆 2 使两个滑 轮之间出现高度差, 产生力臂, 细线分别绕过两个滑轮 悬挂相同质量的砝码。若要对负方向进行标定, 只需要 调换两个支撑杆的位置即可。
在对正方向进行力矩标定时, 如图 7 (e) 所示, 将 滑轮支撑杆 1、滑轮支撑杆 2 分别置于主工作台如图位置 的安装槽中, 借助滑轮支撑杆 1 和滑轮支撑杆 2 使两个滑 轮之间出现高度差, 产生力臂, 细线分别绕过两个滑轮 悬挂相同质量的砝码。若要对负方向进行标定, 只需要 调换两个支撑杆的位置即可。
在对正方向进行力矩标定时, 如图 7 (f) 所示, 将 两滑轮支撑杆 1 置于主工作台如图位置的安装槽中, 两 个需受力的径向加载孔连线垂直于 x 轴, 力臂就是两个 受力的径向加载孔之间的距离, 细线分别绕过两个滑轮 悬挂相同质量的砝码。若要对负方向进行标定, 只需将 两滑轮支撑杆 1 分别固定在当前安装槽的另一侧。
2 标定平台误差分析
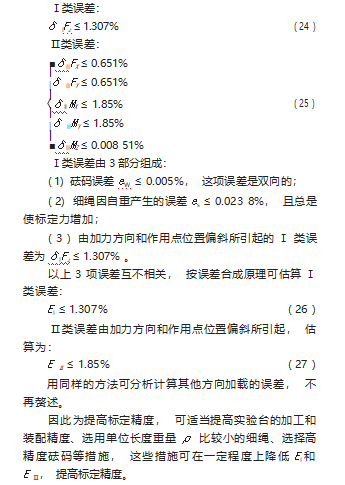
2.1 砝码误差
误差分析采用双钩砝码加力, 其质量相对误差为:
eW ≤ 0.005% ( 1 )
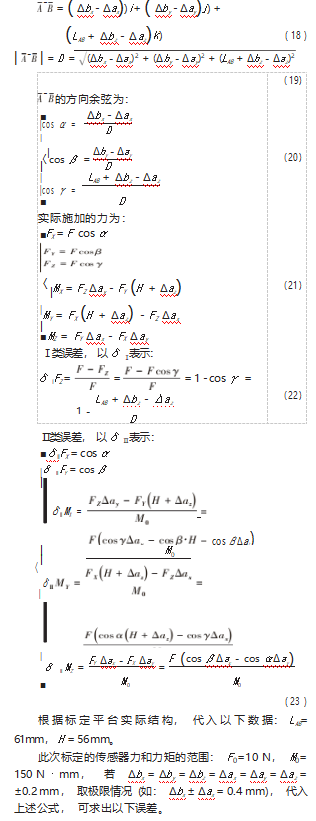
2.2 绳索自重引起的误差
悬挂砝码的细绳分为 5 段, 各段长分别为 LAB 、LBC、 LCD 、LDE 、LEF, 如图 8 所示, 设单位长度的细绳重为 ρ, N/mm, 以下分段分析。
3 结束语
本文介绍了一款用于腔镜手术机器人的六维微型力/ 力矩传感器静态标定的标定平台, 并证明了其结构的稳 定性及可行性。六维微型力/力矩传感器静态标定平台能 够 在 6 个 方 向 上 对 六 维 微 型 力/力 矩 传 感 器 进 行 FX, FY, FZ , MX, MY, MZ 力/力矩的静态标定。根据六维微型 力/力矩传感器的结构尺寸设计并制造了满足要求的六维 微型力/力矩传感器标定平台, 该标定平台采用夹紧装置 将传感器固定, 设计了用来传递各个方向力的加载帽, 该平台还设有调平装置, 可调整传感器与标定平台的垂 直度。给出了六维微型力/力矩传感器静态性能标定加载 的方法, 对标定平台 Fz 方向的加载进行了误差分析, 确 定了 Ⅰ类误差 EI ≤ 1.307% 、 Ⅱ类误差 E Ⅱ ≤ 1.85%。
参考文献
[1] THIELMANN S, SEIBOLD U, HASLINGER R, et al. MICA - a new generation of versatile instruments in robotic surgery[C]// IROS 2010. IEEE International Conference on Intelligent Robots and Systems, October 18-22. 2010. Taipei, China. New York: IEEE, 2010.
[2] HASLINGER R, LEYENDECKER P, SEIBOLD U. A fiberoptic force-torque-sensor for minimally invasive robotic surgery[C]// 2013 IEEE International Conference on Robotics and Automa⁃ tion, May 06-10. 2013. Karlsruhe, Germany. New York: IEEE, 2013.
[3] 张晓辉 . 机器人六维力传感器静态标定研究[J]. 自动化与仪 表,2004(3): 88-90.
[4] 蔡大军,姚建涛,李颖康,等 . 重载并联六维力传感器及静态标 定[J]. 计量学报,2021. 42(8): 1026-1033.
[5] 贾振元,李映君,张军,等 . 并联式轴用压电六维力/力矩传感器 [J]. 机械工程学报,2010. 46(11): 62-68.
[6] 孙永军 . 空间机械臂六维力/力矩传感器及其在线标定的研究 [D]. 哈尔滨: 哈尔滨工业大学, 2016.
[7] SUN Y, LIU Y, HONG L. Temperature compensation for six-di⁃ mension force/torque sensor based on radial basis function neu ⁃ ral network[C]// 2014 IEEE International Conference on Informa⁃ tion and Automation (ICIA), July 28-30. 2014. Hailar, China. New York: IEEE, 2014.
[8] 郑红梅 . 机器人多维腕力传感器静、动态性能标定系统的研 究[D]. 合肥: 合肥工业大学, 2007.
[9] 郑红梅, 刘正士, 郑传荣,等 . 机器人六维腕力传感器标定试验台误差分析与研究[J]. 计量学报,2005(4): 333-336.
[10] 俞阿龙 . 基于仿生算法的机器人腕力传感器动态特性及相 关技术研究[D]. 南京: 东南大学, 2005.
[11] 俞阿龙,黄惟一 . 加速度传感器的动态性能校正技术[J]. 测控 技术, 2004(7): 5-7.
[12] 付立悦 . 多维力传感器的静动态性能研究[D]. 南京:东南大 学, 2021.
[13] 付立悦,宋爱国 . 六维力传感器静态标定系统误差分析[J]. 计 量学报,2019. 40(2): 295-299.
[14] 王宣银 ,尹瑞多 . 基于 Stewart 机构的六维力/力矩传感器[J]. 机械工程学报, 2008. 44(12): 118-122.
[15]王娜君, 袁俊哲 . 六维力/力矩传感器加载定度方法和装置的 研究[C]//中国金属切削研究会第四届全国学术年会会议论 文集, 南京: 中国高校金属切削研究会, 1991.
[16]廖连杰,桑勇,郭联龙,等 .基于 STM32 的电动 6-DOF加载系统 设计[J].机电工程技术,2023.52(1):26-29.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/63312.html