SCI论文(www.lunwensci.com)
摘要: 借助 Unity3D 虚拟现实开发平台设计并开发了一套工业机器人的虚拟仿真教学实验系统。以某款六轴工业机器人 KR16 R1610 为研究对象, 运用 SolidWorks 与 3DsMax 软件完成了工业机器人的三维建模及动画制作, 运用 Photoshop 软件对模型进行贴图 制作和 UI 界面设计, 使用博图V16 软件完成机器人控制程序代码, 利用C#语言实现 PLC 与Unity3D 软件的通信与数据交换, 最终 在 Unity3D 平台中完成并发布工业机器人仿真实验教学系统。该系统提供工业机器人在智能制造产线中的工作原理以及工业机器人 的结构组成等教学内容, 实现了工业机器人教学的虚拟可视化。系统具备 PC 端人机交互功能, 亦可通过博图软件编写的 PLC 程序 控制仿真机器人动作, 能够极大地提高学生动手编程能力和实验兴趣, 提高实验效率, 改变传统实验教学方式。
关键词:工业机器人,虚拟现实,虚拟仿真,实验教学
Unity3D Based Industrial Robot Virtual Simulation Teaching Experiment System
Zhang Conglin, Wang Quanjing, Chen Qingkui
(School of Mechanical and Electrical Engineering, Shandong Jianzhu University, Jinan 250100. China)
Abstract: A virtual simulation teaching experiment system of industrial robot was designed and developed with the Unity3D virtual reality development platform. This paper took a six axis industrial robot KR16 R1610 as the research object, completed the 3D modeling and animation of the industrial robot with SolidWorks and 3DSMax software, mapped the model with Photoshop and designed the UI interface, completed the robot control program code with Botu V16 software, and realized the communication and data exchange between PLC and Unity3D software with C# language, Finally, the simulation experiment teaching system of industrial robot was completed and released in Unity3D platform. This system provides teaching contents includes the working principle of industrial robot in intelligent manufacturing line and the structure of industrial robot, and realizes the virtual visualization of industrial robot teaching . The system possesses human-computer interaction function, and can also import PLC programs from the Botu software to control the robot’s movement, which can greatly improve the students’programming ability and experimental interest, improve the experimental efficiency, and change the traditional experimental teaching method.
Key words: industrial robot; virtual reality; virtual simulation experiment
引言
自 2015 年以来, 随着“工业 4.0”、“中国制造 2025” 等概念的相继提出、自动化技术发展以及工业机器人技 术不断创新, 市场对于工业机器人需求量逐年攀升。面 对工业机器人规模空前增长, 企业对其高端人才求贤若 渴, 各大高校也纷纷开设工业机器人实验课程。由于工 业机器人涉及多学科多领域, 理论知识较为复杂和抽象 等原因, 导致学习门槛较高, 学生入门难。此外, 由于 市面上工业机器人种类繁多, 一些主流机器人在操作和 使用方面也存在许多的差异[1], 同时一套完整的工业机 器人价格昂贵, 后期对其保养与维护成本又较高, 且学 生在操作时很难保证自身安全,“一机多人”的窘状, 也 难以保证让每一位实训着参与其中, 所以传统的实训教 学模式已经无法满足高校对工业机器人高端人才的培养需求, 研究新型的教学模式显得尤为重要[2-4]。
Unity3D 作为当下最主流的虚拟开发平台, 其内部强 大的物理引擎与友善的开发环境是其他软件不可比拟的。 康国坡等[5]采用 Unity3D 软件开发了一套形象逼真、交互 功能强的虚拟仿真实验平台用于智能制造的相关课程实 训教学。李皓杰等[6] 利用 Unity3D 软件开发了多部件的虚 拟装配, 实现视角自由切换功能, 用于装载机认知和拆 装教学与实训。
基 于 Unity3D 的 优 势, 本 文 借 助 SolidWorks 、3Ds⁃ Max 、Photoshop、博图等软件, 以 KUKA 六自由度机器 人 KR16 R1610 为例, 开发了一个可交互的、沉浸式的工 业机器人虚拟仿真实验平台。在此实验系统中, 实验者 可以实现对机器人的一键拆卸与安装, 学习机器人的组 成结构与工作原理; 可对机器人自由编写运动控制代码,掌握 PLC编程的前后逻辑关系, 提高学生学习效率。
1 仿真实验系统的总体设计
1.1 仿真实验系统的目的与任务
工业机器人虚拟仿真教学实验系统以实际加工生产 过程为基础, 结合虚拟现实技术的交互性、沉浸式和概 念性功能, 在 PC端为实验者提供一个虚拟仿真实验操作 平台。在构建 3D 场景时, 使用 Unity3D 软件开发物理模 型, 产生文本、图像、声音等, 映射成系统所需要的数 据文件[5]。该系统的开发主要包括 4个模块: 系统介绍模 块; 设备认知模块; 仿真实验模块; 自测考核模块。通 过完整的虚拟制造流程: 毛坯下料、车床加工、零件清 洗烘干、零件组装、零件入库等环节, 来达到工业机器 人的实验教学的效果。总体结构如图 1所示。
1.2 仿真实验系统的功能介绍
该虚拟仿真试验系统依托于山东建筑大学智能制造 产线, 1 ∶ 1 真实还原从毛坯下料到标准件入库的工业机 器人仿真过程, 实验者可以通过键盘鼠标来实现与实验 系统的交互。系统用以文字提示、有声视频、动画展示 的方式对工业机器人仿真过程及其组成结构进行了详细 讲解。
在设备认知模块, 实验者可以将鼠标光标放置任意 一设备或者零件模型上, 即可出现高亮效果来显示名称, 来加深对设备结构的认识和理解; 通过拖拽鼠标可实现 对模型的拆卸与安装; 在仿真实验模块中, 实验者可在 PC端实时监测机器人运动位姿, 通过点击鼠标、键盘可 实现在场景内的漫游行走。
实 验 系 统 将 以 PLC 编程软件博图与 Unity 通过虚拟 联 调 的 方 式 结 合 起 来,学生可以根据需要在博图软件中自由编程来实现对工 业 机 器 人 动 作 的 控 制 。PLC部分程序如图 2所示。
1.3 仿真实验系统开发流程
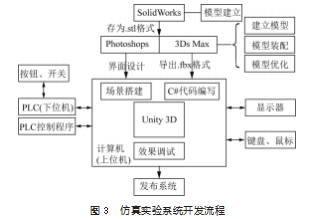
仿真实验系统的开发主要是以 Unity3D 虚拟平台为 载体, 以博图软件与西门子 S7 系列 PLC 和PLCSIM Ad⁃ vanced媒介, 使用 SolidWorks 与 3Ds max建模软件来进行前期建模; 利用 Photoshop 来对贴纸进行美化和界面设 计; 运用 Flash软件制作二维动画; 最终将上述内容导入 Unity3D 中进行模型整合、场景搭建、脚本设置、效果调 试等操作, 选择 Visual Studio 为程序编写工具, 使用 C# 编程语言实现人机交互的功能, 最后则是对整个系统进 行整合发布[6]。系统开发流程如图 3所示。
2 仿真实验系统的关键技术
仿真实验系统涉及的主要关键技术包括三维建模、 动画制作、碰撞检测、 UI设计、 PLC 与 Unity3D 的通信 等。下面将对上述关键技术在系统中的应用进行阐述。
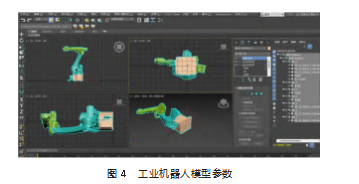
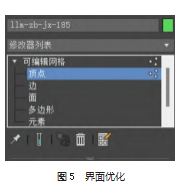
( 1) 三维建模与动画制作: 主要以 Solid Works 与 3Ds Max 两款软件建模。简易模型如滑动地轨、机器人 等使用前者进行建模, 场景以及曲面较多的模型则使用 后者进行建模。将 SolidWorks 制作的模型导入 3Ds Max 软件中进行模型优化, 主要包含材质贴图与模型减面等, 并且采用 3Ds max 中的动画功能制作简易动画并对其进 行分帧, 方便后期在 Unity3D 中直接调用[7]。对较为复 杂的模型, 通过 3Ds max 进行减面处理。以机器人为 例, 图 4~5 为模型减面后的参数, 优化后的模型面数为 49 860. 顶点数为 26 441.经过研究比较, 优化后的模型参数为优化前的1/2至1/3, 减小存储体积的同时, 大大减小了后期 Unity3D开发平台的数据处理量。在不改变原有视觉效果表现的前提条件下, 对于一 些曲面较多且较为复杂模型, 为了减小整个模型所占内内存的体积, 将使用贴图 操 作 表 达 模 型 的 内容[8] 。 在 3Ds max 软 件中, 通过录制关键帧的方式对模型进行动画制作 。 基 本 的 操 作 过 程:选中目标模型; 点击下方自动关键帧按钮; 点击上方菜单栏十字按钮; 鼠标拖动模型到下一位置; 再次点击自动关键帧按钮”; 完成动画制作。
( 2) 碰撞检测: 碰撞检测是开发设计过程最基础的 环节, 关系着实验者的真实体验。在仿真实验系统中包 含了大量的车间厂房、桌椅门窗、设备零部件等。当任 意零部件发生交互时, 肯定会发生模型之间的相互作用。 所谓碰撞检测即是检测模型是否发生了干涉碰撞, 主要 运用的算法包括空间剖分法和层次包围盒法 [9-10]。两种 方式在检测原理和使用范围存在一定的差异性, 本系统 采用的是层次包围盒检测方式。该方法的基本原理是在 模型表面构建一层包围盒, 通过检测包围盒是否发生碰 撞和相交来检测模型之间的干涉。此系统内碰撞检测实 现的主要方法: ①给车间房屋建筑、厂房添加静态碰撞 器, 以避免模型在拆分安装或者场景漫游过程中发生穿 墙等现象[11]; ②在实验模式中对冲压设备进行手动拆分 或者组装时, 需在 Unity3D 开发平台中使用 C#编写碰撞 检测代码。当检测到拆卸工具与目标模型接触后, 便执 行代码使工具无法继续向前, 只能改变方向[12]。
( 3) UI 设计: 在所有虚拟仿真实验系统中, 一个良好的 UI 界面能够给实验者带来较好的交互感与沉浸感。在此仿真试验系统中, 包括“实验须知”、“设备认知”、“仿真实验”、“自测考核” 4个场景, 因此实验者在操作时需要在不同的场景之间进行切换。 UI 界面的功能开发可直接调用 Unity3D 开发平台中的UGUI 模块, 如图 6所示, 配合 C#代码来完成对系统内所有组 件的控制。通过此组件, 实验者可以点击鼠标来实现交 互性学习[13-14]。
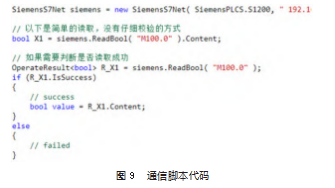
( 4) Unity3D 与博图软件的通信: 为了实现 Unity3D 可以实时、不间断地接收 PLC数据信号, 需要对 Unity3D 与 PLC 进行虚拟联调。首先在博图 V16 中, 借助 PLC⁃ SIM Advanced (虚拟机) 软件仿真 PLC 逻辑控制程序以 及外部通信。首先设置其网卡的 IP地址和子网掩码, 将完成的 PLC程序下载到虚拟机后启动仿真, 如图 7所示, 下载完毕后, 打开博图中 Wincc Runtime Advanced 仿真 可自定义机器人轴转动速度及滑轨移动速度。如图 8 所示。在 Unity3D 中, 使用 HslCommunication插件可实现对 各种主流 PLC数据的读写, 实现 modbus、机器人的各种 协议读写等等。 HslCommunication 是一个工业物联网的 底层架构框架, 专注于底层的技术通信及跨平台, 跨语 言通信功能, 支持快速搭建工业上位机软件、组态软 件、 SCADA软件、工厂 MES 系统。读取 PLC 的数据通过 使用通信脚本实现, 可以选用 Read、ReadBool、Read⁃ Byte 及 ReadString 等方法, 此处以 ReadBool 方法为例展 开介绍。通信脚本代码如图 9所示。在编写通信脚本过程时, 由于上述的通信操作需要 实时性, 对资源的消耗较大, 如果每一帧都实时操作, Unity3D 的 Game 界面将会变得十分卡顿, 因此需要通过协程在一定帧内完成通信工作, 从而避免影响主任务的 进行。协程是通过迭代器来实现功能, 其中最关键的是 yield 的使用, 这是实现协程功能的主要途径, 通过该关 键方法, 可以使得协程的运行暂停、记录下一次启动的 时间与位置等等。迭代器代码如图 10 所示。
3 仿真实训系统的测试
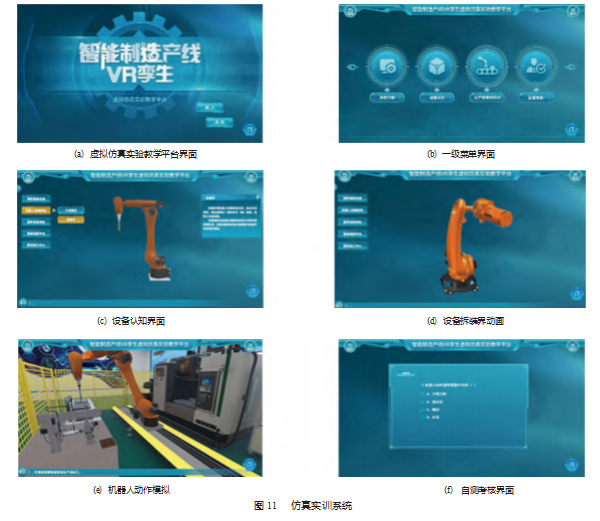
该仿真实训系统是一种桌面式虚拟现实系统, 因此 实训者主要借助 PC 端进行学习操作。如图 11 (a) 所示。
( 1) 在电脑端打开虚拟仿真实验教学系统, 进入初始界面, 如图 11 (b) 所示, 鼠标点击进入后进入实验 系统一级菜单界面。
( 2 ) 鼠标点击设备认知模块, 包括仓储、机器人、 清洗机、加工中心、装配平台等设备, 以机器人为例, 右侧通过文字的形式介绍工业机器人的组成结构, 实现 对机器人的安装与拆卸, 一键爆炸视图等。点击鼠标左 键可 360°自由拖拽模型, 如图 11 (c)、(d) 所示。
( 3) 在生产线实训流程模块中, 在要加工产品位置 输入产品数量, 点击下单按钮, 工业机器人开始动作, 如图 11 (e) 所示。
( 4) 考核测试内容以选择题的形式, 巩固对工业机 器人的理论知识, 如图 11 (f) 所示。
( 5) 仿真实验教学平台界面的右上角左侧为返回按 钮, 点击后返回最初界面, 右上角右侧为退出按钮, 点 击后退出实验平台, 右下角为界面操作按钮, 可对画面 进行全屏操作以及动画声音调节。
4 结束语
在全球疫情的大环境下, 开发工业机器人的虚拟仿 真实验教学系统, 一方面解决了学生在实训过程中场地和资金等条件的限制, 提供了一种真实的虚拟仿真实验 环境, 实现了对工业机器人在产线中的运动仿真, 实现 了虚拟拆卸与安装等, 实训者可以反复操作学习, 降低 教学成本和实验成本; 另一方面应用虚拟现实仿真技术, 采用多种交互方式, 提高了学生兴趣与参与度, 实现了 从被动接受知识到主动学习知识的态度转变, 有助于学 生快速掌握工业机器人领域的相关知识。这种“VR+实 验”的学习模式彻底改变了传统的实训方式, 不仅提高 了教师的授课效率, 而且实现了学生可以不受时间和地 点限制的自主重复学习, 为现代学生提供了实质性的平 台资源和学习保障体验[15- 16]。
参考文献:
[1] 高帆,程思毅, 刘东,等 . 基于 Unity3D 的虚拟工业机器人建模 与运动仿真[J]. 信息记录材料,2020.21(9):12- 13.
[2] 魏志丽 . 虚拟工业机器人实验实训室的建设与研究[J]. 自动 化技术与应用,2013.32(8):85-87.
[3] 陈清奎 , 魏鑫鑫 , 何芹 , 等 . 基于"VR+云平台" 的机械类专业 实验教学模式改革与实践[J]. 实验技术与管理,2020.37(7): 1-4.
[4] 王荣校,李全城 . 基于虚拟仿真的工业机器人实训混合教学研 究[J]. 实验室科学,2021.24(6):114- 116.
[5] 康国坡, 张冰洁,吴立华,等 . 基于 OCTOPUZ 的工业机器人工作 站虚拟仿真[J]. 机电工程技术,2023.52(2):265-268.
[6] 李皓杰,李钢,丁浩杰,等 . 装载机虚拟仿真系统的研究[J]. 机电 工程技术,2022.51(9):185- 187.
[7] 陈清奎 . 计算机辅助教学研究[M]. 北京:地质出版社, 2016:114- 175.
[8] 李春 . 中职工业机器人教学中存在的问题及其对策[J]. 中外 交流,2019.26(41):63.
[9] 李静 蓉 , 倪 建 龙 , 陈 锐 奇 , 等 . 基 于 虚 拟 现 实 交 互 的 虚 拟 锻 造工艺实习系统设计叨[J]. 实验室研究与探索 ,2017.36(4): 87-89.
[10] 胡彦超 . 沉浸式机械工程实训车间教学系统的设计与开发 [D]. 济南:山东建筑大学,2021.
[11] 陈星男 . 基于 VR 技术的楚编钟演奏系统中的碰撞检测算法 研究[D]. 武汉:华中师范大学,2020.
[12] 张巧芬,孙建波, 史成军,等,新型轮机仿真平台实操考试自动 评估算法[J]. 哈尔滨工程大学学报,2014(6):725-730.
[13] 秦现磊 . 基于 HTC VIVE 车床 CA6140 虚拟教学系统的研发 [D]. 济南:山东建筑大学,2018.
[14] 张言科 . 应用 AR 技术的数控机床故障诊断与辅助维修系统 研究与开发[D]. 济南:山东建筑大学,2021.
[15] 胡彦超, 陈清奎,魏鑫鑫,等 . 基于虚拟现实技术的机械虚拟智 能车间实训系统[J]. 制造技术与机床,2020(4):16- 19.
[16] 严慧萍 . 虚拟仿真在中职实训教学中的应用研究[D]. 福州:福 建师范大学,2014:21.
[17] 张巧芬,孙建波, 史成军,等 . 新型轮机仿真平台实操考试自动 评估算法[J]. 哈尔滨工程大学学报,2014(6):725-730.
[18] 陈清奎,何芹,李学东,等 . VR 技术与传统教育深度融合—— "VR+"教学模式创新与实践[J]. 中国信息技术教育,2018(23): 83-84.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/63240.html