SCI论文(www.lunwensci.com)
摘要:针对特种车辆在行驶过程中车身稳定性要求,设计了一种基于模糊PID的电液位置伺服控制系统作为车辆主动悬架的伺服作动器。根据电液位置伺服系统的物理结构和工作特点,推导出系统各个环节的传递函数。利用MATLAB/Simulink仿真分析系统的动态响应与信号跟踪能力,分析闭环系统负载变化时的单位阶跃响应曲线、不同频率下的正弦波输入输出曲线。结果表明,基于PID和模糊PID控制的电液位置系统的单位阶跃响应最大超调量分别为19.5%和0,调节时间分别为251 ms和117 ms。当负载质量变化时,基于PID控制的系统的单位阶跃响应存在明显波动,而模糊PID控制的系统的单位阶跃响应基本没有变化。当分别输入不同频率的正弦波信号时,模糊PID控制的系统的跟踪性能和稳态误差都明显优于PID的控制效果。因此,模糊PID控制下的电液位置伺服系统实现了不同负载质量下的位置控制输出以及不同频率下系统的跟踪性能,满足系统的稳定性与快速性要求。
关键词:模糊PID;液压;位置控制
Modeling and Simulation of Electro-hydraulic Position Servo System Based on Fuzzy PID
Hu Kun,Li Sichao,Lu Yuanhao,Ai Xuezhong
(College of Information and Control Engineering,Jilin University of Chemical Technology,Jilin,Jilin 132000,China)
Abstract:A fuzzy PID based electro-hydraulic position servo control system was designed as a servo actuator for the active vehicle suspension to meet the requirements of the heavy vehicle stability during driving.Based on the physical structure and working characteristics of the electro-hydraulic position servo actuator,the transfer functions of each link of the system were derived.Using MATLAB/Simulink to simulate and analyze the dynamic response and signal tracking ability of the system,the unit step response curve when the load of the closed-loop system changes,and the sine wave input and output curve at different frequencies,were obtained and analyzed.The results show that the maximum overshoot of unit step response of the electro-hydraulic position system based on PID and fuzzy PID control is 19.5%and 0 respectively,and the adjustment time is 251 ms and 117 ms respectively.When the load quality changes,the unit step response of the system based on PID control fluctuates significantly,while the unit step response of the system based on fuzzy PID control basically remains unchanged.When inputting sine wave signals of different frequencies separately,the tracking performance and steady-state error of the fuzzy PID control system are significantly better than the control effect of PID.Therefore,the electro-hydraulic position servo system under fuzzy PID control achieves position control output under different load masses and tracking performance of the system at different frequencies,and meets the stability and speed requirements of the system.
Key words:fuzzy-PID;hydraulic pressure;position control
0引言
电液位置伺服系统具有响应速度快,器件结构紧凑,输出功率大等优点,很适合作为特种车辆主动悬架的伺服作动器。为了保证电液位置伺服系统以最佳性能工作,国内外学者针对该系统提出了多种控制算法。吴凌华等[1]提出了降阶自抗扰控制策略,仿真结果表明,该策略可大幅度降低系统的超调量并有效的削弱观测器滞后问题,但是系统单位阶跃响应的上升速度没有明显改善。王云飞等[2]将双干扰观测器引入到电液位置伺服系统中,并采用反步法来设计控制器,仿真结果表明,与PID控制器相比,该策略使系统的位置跟踪精度得到大幅提高,但是没有对系统的稳定性作进一步的分析。蔡改贫等[3]改进了PSO算法,并使用模型自适应算法控制电液位置伺服系统,仿真结果表明,系统的响应速度和跟踪精度均得到不同程度的增加。刘丽珍等[4]提出自抗扰控制策略,用以处理电液比例位置系统的干扰问题,仿真结果表明,该策略不仅提高了系统的抗干扰能力,而且减小了系统的误差。郭庆贺等[5]将内模控制算法引入到负载质量变化的电液伺服位置系统中,仿真结果表明,当负载质量变化时,和PID算法相比,该算法使系统的单位阶跃响应更快速且无超调的达到稳态,正弦输入下的跟踪性能更稳定。吉鑫浩等[6]针对电液位置伺服控制系统提出了滑模反步控制算法,研究表明,滑模反步算法可以抑制非匹配干扰并且系统的跟踪性能也有明显提升。Yuqi Fan等[7]为了提高电液位置系统的抗干扰能力,提出了天牛须算法与PID相结合的控制策略,实验结果表明,当采用不同干扰信号时,该策略能明显提高系统的性能。Li Jianying等[8]建立了采用模糊智能控制策略的电液力控制系统的数学模型,通过仿真和实验结果对比,该策略控制下的电液力控制系统的数学模型是正确的。Peng Xiongbin等[9]针对大型望远镜的电液位置伺服控制系统,提出了一种鲁棒闭环设计,实验结果表明,该控制器实现了鲁棒稳定性和参考跟踪性能。龚正阳等[10]针对参数摄动和非线性的系统提出了迭代学习控制策略,仿真结果表明,系统对输入信号的跟踪能力得到明显改善。
特种车辆的主动悬架需要电液位置伺服系统响应速度快,稳定性强。基于其稳定性的要求,本文采用模糊PID控制算法,以调节时间短且稳态误差小为目标,设计一种电液位置伺服系统,并利用MATLAB/Simulink进行仿真与结果验证。
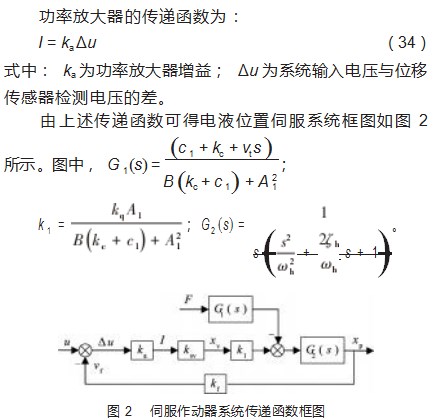
1电液位置伺服系统建模
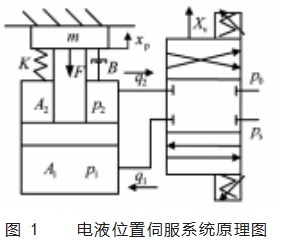
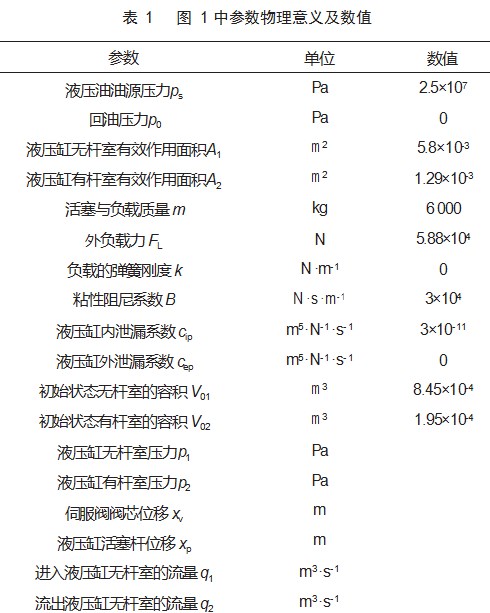
电液位置伺服系统原理图如图1所示[11]。为简化计算,假定液压油油源压力ps为固定值,回油压力忽略不计;液压缸外泄漏系数cep=0;不考虑液体的压缩性;不考虑管道对系统的动态影响;负载为非弹性负载。
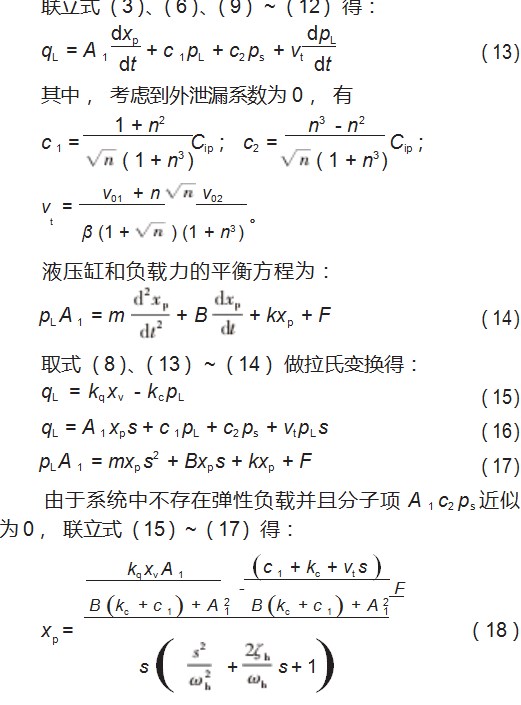
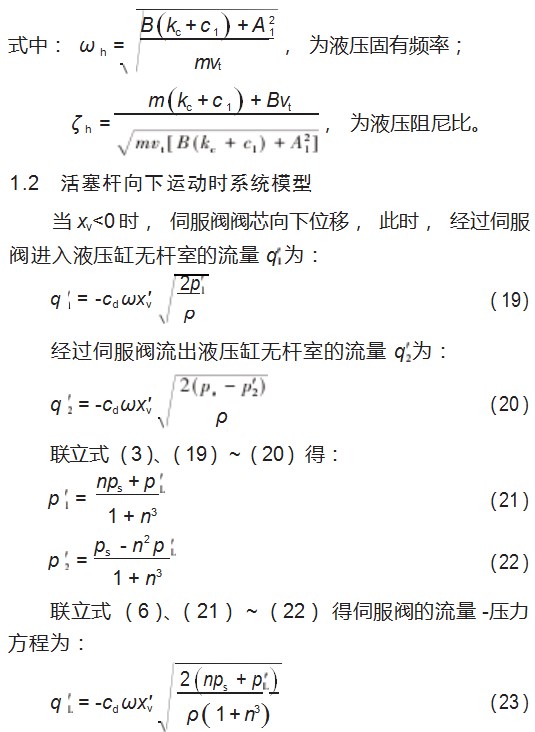
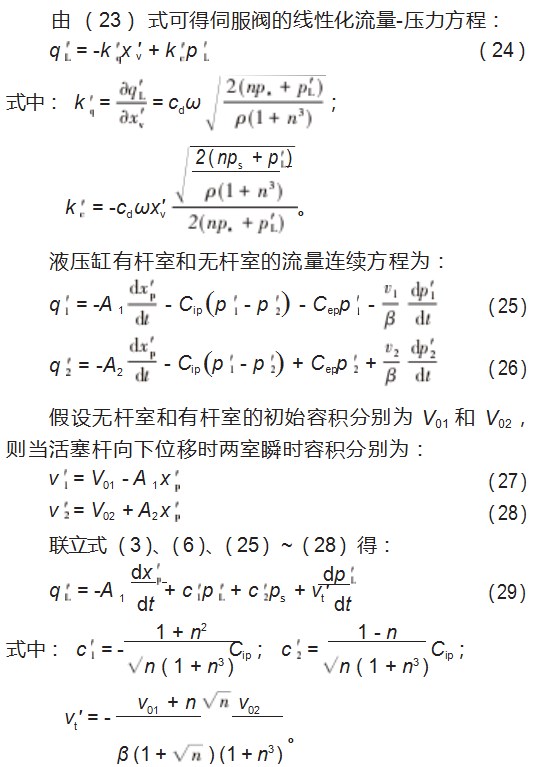
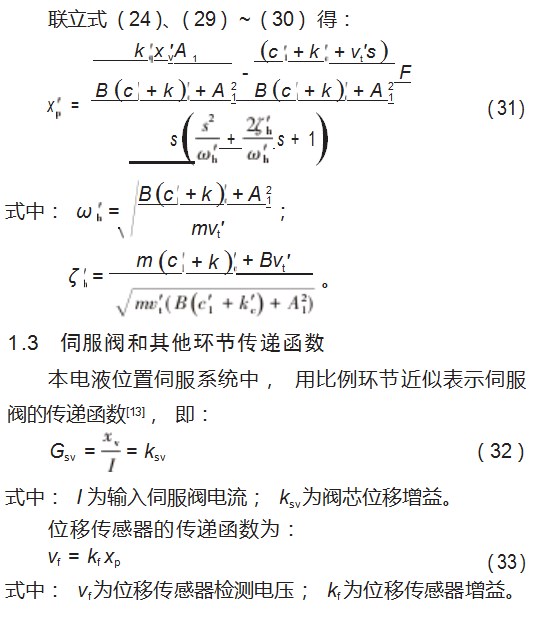
1.1活塞杆向上运动时系统模型
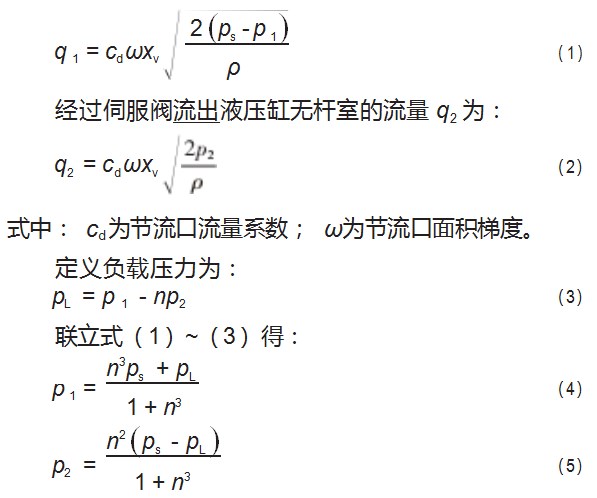
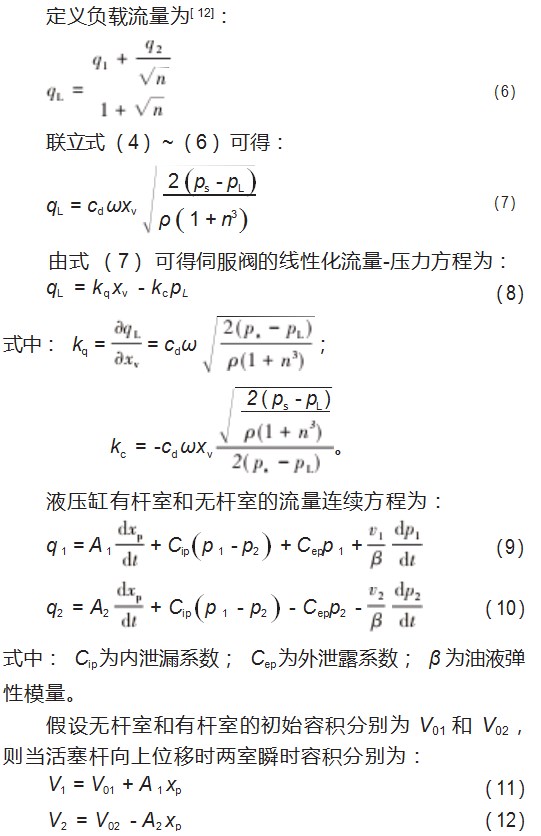
当xv>0时,伺服阀阀芯向上位移,此时,经过伺服阀进入液压缸无杆室的流量q1为:
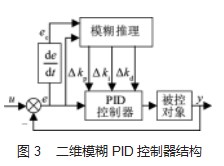
2模糊PID控制器设计二维模糊PID控制器
如图3所示[14]。在电液位置伺服系统中,模糊控制器以活塞杆位移偏差及其变化率ec为输入,以Δkp,Δki,Δkd为输出,被控对象为电液位置伺服系统模型。
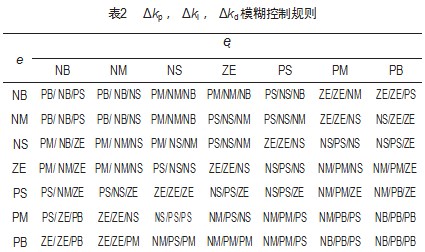
活塞杆位移误差e的取值范围为±0.05 m,误差变化率ec的取值范围为±8 m/s。输入误差、误差变化率及输出的模糊论域取为{-6,-4,-2,0,2,4,6},接着用模糊子集{NB,NM,NS,ZE,PS,PM,PB}来表示。根据电液位置伺服系统的特点,选取输入输出的隶属度函数为三角形函数。在设计模糊控制规则时,首先考虑液压缸活塞杆能够以最快的速度到达指定位置,以满足电液位置伺服系统快速性的要求;其次,要保证系统的超调量尽量小,从而避免系统出现抖动。Δkp,Δki,Δkd的模糊控制规则如表2所示[15]。本文采用Centroid法进行解模糊,可由MATLAB直接得出清晰化输出。
3仿真结果与分析
为了检验模糊PID控制器的控制效果,分析系统的动态响应与信号跟踪能力,利用MATLAB/Simulink对系统进行仿真,系统仿真模型如图4所示。在t=0 s时,输入单位阶跃信号,系统的单位阶跃响应和稳态误差分别如图5~6所示。
由图5~6可知,基于PID控制时,系统输出位移最大超调量为19.5%,以动态响应曲线衰减到与稳态值的差小于2%计算,系统在251 ms时到达稳态,系统的稳态误差为2.14×10-3 V。基于模糊PID控制时,系统输出位移最大超调量为0,系统在117 ms时到达稳态,系统的稳态误差为2.1×10-5 V。由此可知,基于模糊PID控制的电液伺服位置系统明显优于普通PID的控制效果。
当负载质量发生变化时,由式(19)可知,系统的液压固有频率和液压阻尼比也会变化。因此,研究不同负载质量下的系统动态响应很有必要。图7~8分别为基于PID和模糊PID控制时,质量分别为m、1.2m和0.8m时的单位阶跃响应曲线。
由图7可知,当负载质量为1.2m时,基于PID控制的系统输出位移最大超调量为23.7%,到达稳定状态的时间为255 ms。当负载质量为0.8m时,基于PID控制的系统输出位移最大超调量为13.9%,到达稳定状态的时间为199 ms。由图8可知,当负载质量变为0.8m和1.2m时,基于模糊PID控制的系统输出位移最大超调量均为0,到达稳定状态的时间均为117 ms。由以上分析可知,当负载质量变化时,基于模糊PID控制的系统不论在超调量还是调节时间都明显优于普通PID的控制效果。
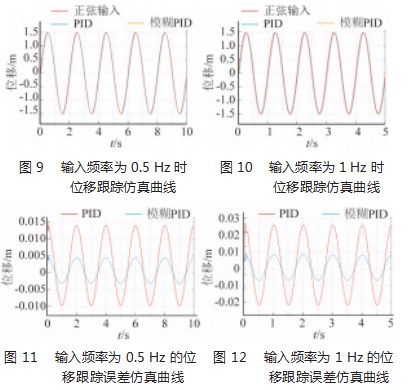
在t=0 s时,分别输入频率为0.5 Hz和1 Hz,幅值为0.15 m的正弦波信号,系统的位移跟踪曲线如图9~10所示,位移跟踪误差曲线如图11~12所示。
由图9可知,当输入频率为0.5 Hz正弦信号时,基于PID和模糊PID控制的电液位置伺服系统位移在幅值和频率均能跟随输入信号。但由图11可知,基于PID控制的系统位移跟踪误差范围为-9.63×10-3~1.4×10-2 m,基于模糊PID控制的系统的位移跟踪误差为-3.14×10-3~4.52×10-3 m。由图10可知,当输入频率为1 Hz正弦信号时,基于PID控制的系统位移跟踪在相位上出现了滞后,而基于模糊PID控制的系统位移仍可以较好地跟踪输入信号。由图12可知,基于PID控制的系统位移跟踪误差范围为-2.14×10-2~2.58×10-2 m,基于模糊PID控制的系统位移跟踪误差为-6.88×10-3~8.3×10-3 m。由以上分析可知,在系统位移跟踪和位移跟踪误差方面,和普通PID控制效果对比,模糊PID控制效果明显占优。
4结束语
本文针对特种车辆对伺服作动器的要求,将模糊PID控制算法运用到电液位置伺服系统中。仿真结果表明,当系统输入单位阶跃响应时,和普通PID控制效果对比,模糊PID控制下的系统无超调,调节时间短且稳态误差小。当负载质量变化时,基于模糊PID控制的电液位置伺服系统的单位阶跃响应基本不受影响,而普通PID控制的电液位置伺服系统的单位阶跃响应有明显变化。当输入不同频率的正弦信号时,基于模糊PID控制的电液位置伺服系统具有更好的位移跟踪能力,且位移跟踪误差明显小于普通PID的控制效果。研究结果说明,本文设计的模糊PID控制算法电液位置伺服控制系统明显优于采用普通PID算法的电液位置伺服控制系统。
参考文献:
[1]吴凌华,神英淇,王静,等.电液位置伺服系统降阶自抗扰控制[J].机床与液压,2022,50(15):175-180.
[2]王云飞,赵继云,曹超.基于双干扰观测器的非对称缸电液系统位置控制[J].中南大学学报(自然科学版),2021,52(11):3864-3871.
[3]蔡改贫,曾常熙,周小云,等.基于改进PSO算法的电液位置伺服系统MRAC跟踪控制[J].液压与气动,2021,45(10):177-183.
[4]刘丽贞,赵治月,周鹏远,等.基于自抗扰控制的电液比例位置同步控制仿真研究[J].机床与液压,2021,49(10):146-150.
[5]郭庆贺,赵丁选,赵小龙,等.基于内模控制的主动悬挂电液伺服作动器位置控制研究[J].农业机械学报,2020,51(12):394-404.
[6]吉鑫浩,汪成文,陈帅,等.阀控电液位置伺服系统滑模反步控制方法[J].中南大学学报(自然科学版),2020,51(6):1518-1525.
[7]FAN Yuqi,SHAO Junpeng,SUN Guitao.Optimized PID control‐ler based on beetle antennae search algorithm for electro-hydrau‐lic position servo control system[J].Sensors,2019,19(12):2727.
[8]LI Jianying,YANG Tianye,WANG Yanwei,et al.Research on electro-hydraulic force servo control system based on adaptive neural network control strategy[J].Applied Mechanics and Mate‐rials,2013,2748(427-429):1163-1166..
[9]PENG Xiongbin,GONG Guofang,YANG Huayong,et al.Quantita‐tive feedback controller design and test for an electro-hydraulic position control system in a large-scale reflecting telescope[J].Frontiers of Information Technology&Electronic Engineering,2017,18(10):190-200.
[10]龚正阳,王立新,刘福才.电液比例系统位置伺服迭代学习控制[J].机床与液压,2020,48(23):81-87.
[11]李波,芮光超,方磊,等.电液力伺服系统自适应抗扰控制研究[J].液压与气动,2019(12):57-62.
[12]袁立鹏,赵克定,李海金.阀控液压缸统一流量方程的分析研究[J].机床与液压,2005(8):97-99.
[13]王春行.液压控制系统[M].北京:机械工业出版社,1995.
[14]马彦,丁浩,牟洪元,等.基于模糊PID算法的动力电池液体冷却策略[J].控制理论与应用,2021,38(5):549-560.
[15]潘乾鹏,周龙,吕宝占,等.越野车半主动悬架的变论域模糊PID控制[J].液压与气动,2022,46(6):82-92.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网! 文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/61513.html