SCI论文(www.lunwensci.com)
摘要:针对跳跃机器人腿部运动控制的稳定性较低的问题,基于模糊PID设计了机器人腿部运动控制系统。以蚱蜢的腿部机构为生物原型,设计了仿蚱蜢机器人腿部弹跳机构模型,分析其运动学和动力学特性,开展ADAMS和MATLAB联合仿真,采用模糊PID对联合仿真系统进行控制,确定了仿蚱蜢机器人控制系统的设计可靠性。结果显示,基于模糊PID的控制方法在仿蚱蜢机器人的跳跃运动中有较好的控制效果,既提高了稳定性,也符合蚱蜢的跳跃机理,同时控制系统的操作也简便。
关键词:跳跃机器人,模糊PID,联合仿真,控制系统
Joint Simulation of Grasshopper Robot based on ADAMS and MATLAB
Xiong Yonggang1,Chen Pengtao1,Wang Yanwei1,Zhang Rui2
(1.College of Mechanical Engineering,Hunan University of Technology,Zhuzhou,Hunan 412007,China;2.Beijing Iron Man Technology Co.,Ltd.,Beijing 100089,China)
Abstract:Aiming at the problem of low stability of leg motion control of jumping robot,a robot leg motion control system based on fuzzy PID was designed.Taking the grasshopper leg mechanism as the biological prototype,the grasshopper-like robot leg bounce mechanism model was designed,and its kinematics and dynamics characteristics were analyzed.The joint simulation of ADAMS and MATLAB was carried out.The fuzzy PID was used to control the joint simulation system,and the design reliability of the grasshopper-like robot control system was verified.The results show that the control method based on fuzzy PID has good control effect in the jumping motion of grasshopper-like robot,which not only improves the stability,but also conforms to the jumping mechanism of grasshopper,and the operation of the control system is also simple.
Key words:jumping robot;fuzzy PID;joint simulation;control system
0引言
为了适应环境、越障、躲避危险,生物往往会采用高爆发高能量的跳跃运动。跳跃的主要过程包括起跳过程、腾空过程和着陆过程。蝗虫、叩头虫、青蛙和袋鼠等动物的跳跃大多为弹跳式。机器人在移动过程中,其运动常常被地形地势所约束,尤其是当地形障碍较大或者障碍物远超机器人大小的时候。如果将动物的跳跃能力应用在机器人身上,它们便能在不同的自然环境中实现更加灵活的运动,运动形式也将更加多变。近年来,随着人工智能技术的发展,跳跃机器人已经成为机械研究的热门领域之一,跳跃机器人在未来可以运用到野外探测、星球探索等领域[1-2]。
针对跳跃机器人的设计与控制问题,研究人员提出了许多不同的结构形式和控制方法。庞云天等人提出基于PID的关节角度控制策略,在SLIP模型的基础上规划关节轨迹,研究单腿跳跃系统的控制,实现了单腿跳跃机器人的稳定控制[3]。北京工业大学的左国玉等人设计了仿袋鼠机器人的系统,创建了基于等效控制法的滑模控制器来对机器人的起跳阶段进行控制,建立了双质量SLIP模型对跳跃阶段进行运动分析[4]。郑彬等人通过对机器人的整体结构和控制模块进行分析,设计了伺服电机控制系统,实现了机器人的姿态控制[5]。伊朗Shiraz大学的Amin Khakpour Komarsofla[6]等设计了平面单腿跳跃机器人新型机构,通过滑模控制器来保证系统的稳定响应。日本横滨国立大学的Barkan Ugurlu[7]等提出了一种运动控制框架以实现传统固有刚性腿式机器人的敏捷和鲁棒运动行为,该控制器利用轨迹发生器合成参考质心轨迹和力的输入,再利用伺服控制器和导纳控制块评估关节水平的力和位置误差,使机器人在受到干扰时保持平衡。
本文针对仿蚱蜢机器人的跳跃控制问题,首先对仿蚱蜢腿部结构模型进行运动学和动力学分析,再建立数学模型[8-9],然后利用ADAMS的控制模块和MATALB/Simulink进行了联合仿真[10-11],控制系统通过模糊PID控制进行反馈调节[12-13],结果表明,基于模糊PID的仿真控制系统得到的参数数据波动更稳定,通过对控制系统进行闭环反馈调节,利用模糊PID控制器对每个关节进行调节控制,实现了系统稳定性的提高。
1蚱蜢跳跃机构模型的建立和分析
1.1蚱蜢腿部机构与运动机理
在大自然中,与其他的仿生对象对比,蚱蜢跳跃性能更加出色,翅膀能在空中调整姿态,落地的缓冲性能也较好,因此选择蚱蜢作为本文的研究对象。蚱蜢跳跃的过程分为起跳阶段、腾空阶段、落地阶段,其中蚱蜢后腿肌肉的伸缩为蚱蜢的起跳和落地提供能量。蚱蜢的后腿分为跗足、胫节、腿节3部分,3个关节分别为跗关节、膝关节、髋关节。蚱蜢的跗关节连接的是跗足和胫节,跗足在蚱蜢的运动过程中有稳定和支撑躯体的作用,蚱蜢的膝关节连接的是胫节和腿节,膝关节通过腿节上肌肉的伸缩使胫节跟着转动,蚱蜢的髋关节连接的是腿节和躯体,躯体通过后腿的爆发达到跳跃的能力。蚱蜢后腿的结构如图1所示。
1.2运动学模型
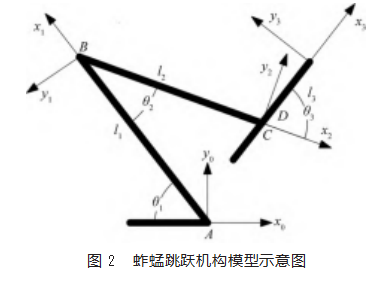
根据蚱蜢的起跳方式对蚱蜢后腿的结构模型进行简化,建立运动学模型图如图2所示。以跗关节点A为基坐标系x0-y0的原点,膝关节点B为膝坐标系x 1-y 1的原点,髋关节点C为髋坐标系x2-y2的原点,D为躯体的质心。其中l1、l2、l3分别为胫节、腿节、躯体的长度;θ1、θ2、θ3分别为跗关节、膝关节、髋关节的角度。根据图2的模型写出腿部各关节的D-H参数表,如表1所示。
2跳跃机构的动力学分析
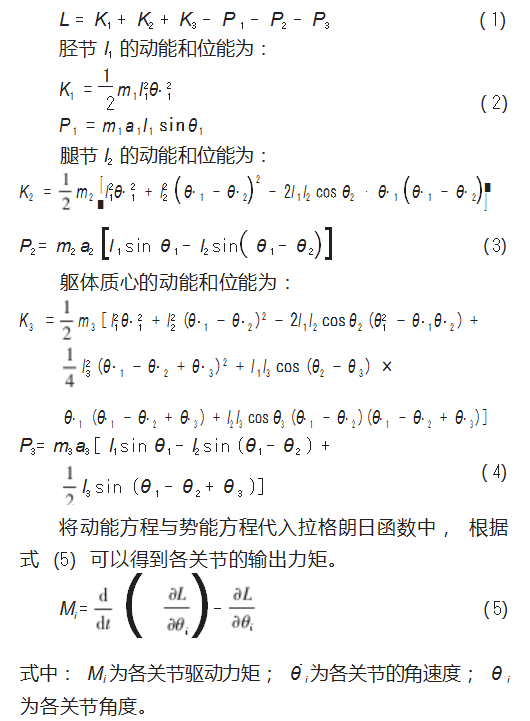
对于模型跳跃阶段的动力学分析,可以用拉格朗日方程分析,最后求出各关节的输出力矩。
假设m1~m3分别为胫节、腿节、躯体的连杆质量,a1~a3为各连杆的加速度,K1~K3为各连杆的动能,P1~P3为各连杆的重力势能,最后得到的拉格朗日函数表达式如式(1)所示。
3 ADAMS和MATLAB联合仿真
3.1虚拟模型的建立
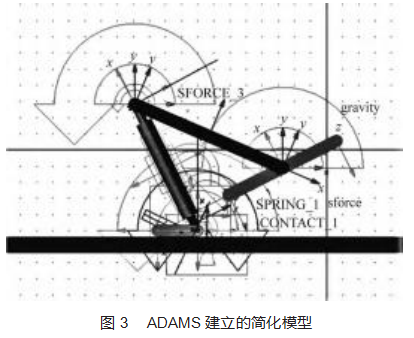
在ADAMS中建立仿蚱蜢机器人简化模型,添加约束、驱动力、接触力,最后建成的模型如图3所示。在模型建好后,定义状态变量,输入变量为跗关节力矩、膝关节力矩、髋关节力矩(liju1,liju2,liju3),输出变量为关节角θ1、θ2、θ3(jiao1,jiao2,jiao3)。对于机械系统端口的建立,在ADAMS中建立好每个状态变量后,将力矩、角度等数据关联到对应的状态变量中。通过ADAMS/CONTROLS模块可以将机器人的虚拟样机机械系统转化为MATLAB/Simulink中子系统模块,根据模型的输入输出状态变量,在建立子系统模块时选择对应的输入输出信号。
在MATLAB/Simulink中打开ADAMS导出的机械子系统模型,生成ADAMS_SUB子模块,子模块的组成如图4所示。在Simulink中搭建控制系统框架模型,利用模块端口连接机械系统和控制系统,建立完整的反馈系统。在进行ADAMS和MATLAB的联合仿真时,需要连接状态空间和接口变量,才能在不同的时间点上通过IPU进行实时实验数据信息的交互。
3.2联合仿真系统设计
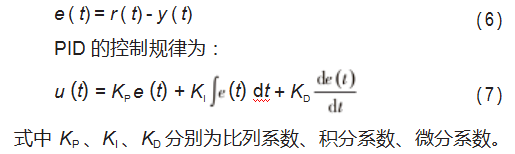
因PID控制结构简单,容易调整,在控制系统最为常用。传统PID算法是一种线性控制算法,系统的输入输出分别为r(t)、y(t),系统的偏差e(t)表达式为:
传统的PID控制系统容易出现过度调整现象,系统的动态响应很难满足要求。本文将模糊控制器与PID控制相结合,即能加快控制器的调整速度,同时也能对控制器进行精确控制。用于调整参数的模糊控制器采用二输入三输出的形式。模糊PID控制器的原理框图如图5所示。
在模糊推理过程中,误差e和误差率ec作为控制器的输入量。根据控制策略选择隶属函数,确定输入变量误差e和误差率ec的模糊子集为{NB、NM、NS、O、PS、PM、PB},分别表示‘负大、负中、负小、零、正小、正中、正大’,最后形成的隶属函数如图6所示。
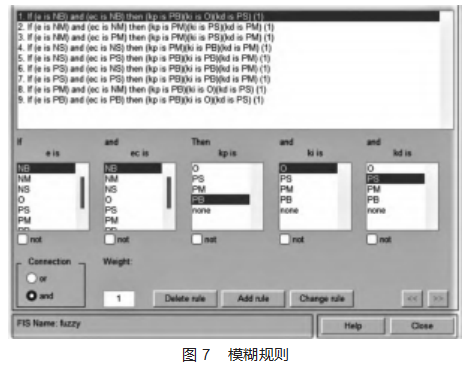
根据控制系统的设计,选择合适的模糊规则表来确定输出变量。图7为MATLAB中设置的模糊规则,输入变量根据图中的9条模糊规则去调整参数。模糊规则是将人的经验和知识以模糊语言的形式表现出来,专家的经验和知识则以规定的形式表现出来。模糊规则的表达方式通常为“If条件then结果”,该表达形式的模糊规则在极大程度上符合人们以自然语言描述知识的习惯。模糊PID的控制效果是由模糊规则确定的,因此选择合适的模糊规则非常重要。输出的3个参数修正值是由模糊PID制定的模糊规则来控制的,所以PID控制器可以通过调整参数来确定系统响应程度,既可以提高系统的动态性,鲁棒性也会变得更好。
输入变量在经过模糊推理化后,通过模糊规则表可以得到比例系数增量ΔKP,积分系数增量ΔKI,微分系数增量ΔKD,最终经过更正后的参数值为:
式中KP0、KI0、KD0均为PID设定的初值。设置跗关节的PID参数初始值为KP0=0.1,KI0=0.05,KD0=0.1;设置膝关节的PID参数初始值为KP0=0.75,KI0=0.65,KD0=0.001;设置髋关节的PID参数初始值为KP0=0.8,KI0=0.9,KD0=0.02。
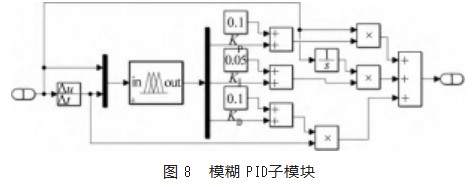
在MATLAB/Simulink中创建模糊PID的子模块,如图8所示。误差e和误差率ec作为模糊控制器的输入变量,输出变量为ΔKP、ΔKI、ΔKD。
通过ADAMS和MATLAB之间的接口将AMAMS中的输入数据经过模糊PID控制调节后,再输入关节力矩,最后在MATLAB中用控制算法进行调节。仿蚱蜢机器人的运动控制采用模糊PID控制,把机器人的非线性关联系统转化为线性多变量关联系统,每个关节采用单独的模糊PID控制器,再利用反馈信号调节偏差信号。之后将ADAMS中导入的机器人子系统导入到MATLAB的控制系统中,以每个关节的角度为反馈,形成一种闭环式仿真系统。联合仿真系统原理如图9所示。
在MATLAB/Sinulink中进行联合仿真。首先在MAT⁃LAB中找到ADAMS导出的机械系统文件,在编辑器上输入adams_sys,系统会在Simulink中自动生成一个系统模块,再对参数进行修改,然后将模糊PID控制器导入到系统中,之后与各个模块进行连接,完成联合仿真系统的建立,建立的联合仿真模块如图10所示。
3.3联合仿真结果
通过调整PID的比例系数、积分系数、微分系数,得到控制后的角度变化如图11所示。从图中可以看出:跗关节的角度变化最小,膝关节的角度变化最大;跗关节在起跳时角度减小,在腾空时角度保持不变,在落地阶段角度增大到起始角度;膝关节的角度在跳跃的最高点达到最大,之后逐渐减小,在落地时回到原始角度。模型跳跃过程的角度变化与蚱蜢的实际跳跃过程相似,符合仿蚱蜢机器人的跳跃机理。仿真后的角度从起跳到落地阶段是一个完整的变化过程,说明在落地阶段模型是处于稳定状态的。
各关节力矩曲线图如图12所示。从图中可以看出,模糊PID控制的关节力矩波动与无控制的关节力矩相比,数据较为稳定、冲击力更小、力矩变化范围也比较小。由图中的结果可以看出该控制方案具有可行性,在模糊PID控制器下,可以通过调节参数来控制仿蚱蜢机器人的跳跃运动。说明基于模糊PID的控制系统既可以提高系统的稳定性,对于控制系统操作也较为简便。
4结束语
针对跳跃机器人的跳跃控制不稳定的问题,设计了基于模糊PID的的机器人控制系统。本文以蚱蜢腿部的简易结构模型为基础,首先在ADAMS中创建虚拟模型,通过ADAMS和MATLAB/Simulink联合仿真创建了控制系统,之后加入模糊PID控制模块,建立了仿蚱蜢机器人控制系统。本研究结果表明,在加入模糊PID控制之后,仿蚱蜢机器人在跳跃过程中变得更稳定,解决了跳跃机器人腿部运动控制稳定性较低的问题。在提高系统稳定性的同时,系统的操作也更为简便。
无控制的ADAMS和MATLAB联合仿真力矩波动范围较大,峰值较高,容易出现跳跃不稳定的情况。而基于模糊PID的控制系统可以在机器人跳跃过程中使各个关节的驱动力矩呈现周期性的波动,不会出现剧烈震动或突变等情况,整体运行稳定。联合仿真技术为仿蚱蜢机器人的运动控制提供了一个新途径,对于以后的仿生蚱蜢机器人的控制系统建立提供了技术支撑。
参考文献:
[1]莫小娟,葛文杰,赵东来,等.微小型跳跃机器人研究现状综述[J].机械工程学报,2019,55(15):109-123.
[2]Wu Dianhao,Jiang Jingang,Yu Xiaoyang,et al.Hopping robot:current status and future perspectives[J].Recent Patents on Me⁃chanical Engineering,2021,14(4):440-455.
[3]庞云天.基于STM32的单腿跳跃机器人控制系统研究[D].杭州:浙江大学,2017.
[4]刘旭.仿袋鼠机器人运动稳定性控制研究[D].北京:北京工业大学,2017.
[5]郑彬.某跳跃机器人的整体结构及其控制模块分析[D].南京:南京理工大学,2017.
[6]Khakpour Komarsofla Amin,Azadi Yazdi Ehsan,Eghtesad Mo⁃hammad.Dynamic modeling and control of a novel one-legged hopping robot[J].Robotica,2021,39(9):1692-1710.
[7]Ugurlu Barkan,Sariyildiz Emre,Kawasaki Takao,et al.Agile and stable running locomotion control for an untethered and one-legged hopping robot[J].Autonomous Robots,2021,45(6):805-819.
[8]陈子明,卢杰,邓朋,等.基于弹尾虫运动机制的平衡轮式跳跃机器人的设计[J].机械工程学报,2020,56(17):20-28.
[9]熊勇刚,成威,龚琦,等.仿蚱蜢跳跃机器人腿部结构设计与性能分析[J].湖南工业大学学报,2021,35(1):48-55.
[10]秦云翔,李冠奎,欧冬梅.基于ADAMS和MATLAB的两轮机器人平衡仿真研究[J].信息与电脑(理论版),2021,33(7):176-179.
[11]杨晓玉,富荣昌,王文远.基于ADAMS和MATLAB的双足机器人运动轨迹规划和控制的联合仿真[J].煤矿机械,2022,43(1):6-9.
[12]魏庆生.四足机器人设计与运动控制仿真研究[D].哈尔滨:哈尔滨工业大学,2020.
[13]马子涵.四足机器人机体姿态及运动控制算法仿真研究[D].西安:中国科学院大学(中国科学院西安光学精密机械研究所),2020.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/59136.html