SCI论文(www.lunwensci.com)
摘要:为了了解柔性部件对机械运动的影响, 也为了在机械结构设计过程中减少设计误差, 保证机械设计作品的可行性和有效性。 基于 ADAMS 软件, 创建平面四连杆机构虚拟模型, 并对其进行运动学仿真分析 。从影响机械运动的关键参数着手, 即: 仿真分析 位移 、速度 、角速度 、角加速度 、各点作用力与力矩变化特性曲线, 用特性曲线描述出平面四连杆的运动趋势, 同时通过对比仿 真数据与理论数据, 得出其理论值与仿真值相差不大, 表明利用 ADAMS 软件对平面四连杆机构进行仿真分析可以验证平面四连杆 机构的运动可行性 。这对于解决机械结构设计过程中出现的机械机构不合理 、不可行等问题具有重要的作用, 同时也在一定程度 上了解了各部件在运动过程中的瞬时状态, 增强对机械结构的分析能力, 提高了设计效率。
关键词 :ADAMS,平面四连杆机构,运动学仿真,实体建模
Kinematics Simulation Analysis of Planar Four-bar Mechanism Based on ADAMS
Fu Xin1. Guo Dajiang2. Lin Shunhong2. Zhang Hua1. Yu Heng1. Chen Hua1. Yang Yuanfang1.
Dai Yuanmeng1. Li Yiman1
( 1. School of Electrical and Electronic Engineering, Chongqing Vocational and Technical University of Mechatronics, Chongqing 402760.
China; 2. College of Mechanical and Power Engineering, Chongqing University of Science and Technology, Chongqing 401331. China)
Abstract: In order to understand the influence of flexible parts on mechanical movement, and reduce design error in the process of mechanical structure design, ensure the feasibility and effectiveness of mechanical design works, a virtual model of planar four-bar mechanism was created based on ADAMS software, and the kinematics simulation analysis of the model was carried out . Start with the key parameters that affect the mechanical motion, namely: the characteristic curves of displacement, velocity, angular velocity, angular acceleration, force and torque at each point were simulated and analyzed. The characteristic curves were used to describe the movement trend of the plane four-link . At the same time, by comparing the simulation data with the theoretical data, it was concluded that the theoretical value and the simulation value were not different. The results show that the motion feasibility of the planar four-bar mechanism can be verified by using ADAMS software to simulate the planar four-bar mechanism. It plays an important role in solving the problems of unreasonable and infeasible mechanical mechanism in the process of mechanical structure design. At the same time, it also understands the instantaneous state of each component in the process of movement to a certain extent, enhances the analysis ability of mechanical structure and improves the design efficiency .
Key words: ADAMS; planar four-bar mechanism; kinematic simulation; entity modeling
0 引言
平面四连杆机构是一种常见的重要机构之一, 常用 于机械领域中的各重要组成部分, 如: 应用于机床 、工 业机器人 、多足机器人 、汽车设计 、液压支护装置 、缝 纫机 、雨刮器等[1-4] 。 四连杆机构在添加驱动后一般均能 按照自定的运动规律运动, 能得到其运动规律的曲线图, 有利于后期优化轨迹 。常用平面四连杆机构通常包括 4 个位置的角度, 分别为极位夹角 、摆角 、压力角 、传动 角 。通过使用 ADAMS 多体动力学仿真软件分析四连杆 机构的运动特性, 能够根据角度值 、位移 、速度 、加速 度以及作用点上的力与力矩, 对其运动特性的分析更加 直观 、准确与高效率 。可为后期的成套机械装备的设计与开发提供有力的条件[5]。
ADAMS 运动学仿真分析, 主要由虚拟样机技术发展 而来 。20 世纪 80 年代开始, 虚拟样机技术得到快速发 展, 计算机技术被赋予了新的概念 。于是, 国内外学者 集中于虚拟样机技术 (Virtual Prototyping, VP ) 的研究。 虚拟样机技术主要是将先进的建模/仿真技术 、现代信息 技术 、先进设计制造技术和现代管理技术进行融合, 并 在复杂产品的生命周期上进行体现和涉及, 从而达到优 化和综合管理产品的目的[6]。
ADAMS 运动学仿真技术作为虚拟样机技术的一种, 因其综合性强, 能实现建模 、求解 、可视化技术一体化 而被广泛应用 。该仿真软件使用交互式图形环境和零件库 、约束库 、力库, 创建完全参数化的机械系统几何模 型, 运用拉格朗日方程方法进行参数求解, 通过建立系 统动力学方程, 对产品机械系统机械动力学分析, 并输 出相应的运动特性曲线, 根据相应的特性曲线就可以对 产品的运行特性进行相应的分析和优化[7] 。该软件的运 用范围广, 可对产品进行多方面的分析, 如: 对机械系 统性能的预测、运动范围、碰撞检测、峰值载荷以及计算 有限元的输入载荷等 。该仿真软件可以直接建模后仿真; 也可通过常用的三维软件 (如: UG、Pro/E、Inventor、 SolidWorks 等) 建立三维模型, 然后再导入 ADAMS 软件 中添加约束和驱动等, 即可完成仿真分析[8-9]。
林国进等[10]基于 ADAMS 运动学仿真软件, 探索了 计算机仿真实验与实验室实验的差别, 得出仿真分析的 准确性较高 。物理实验可以在一定程度上锻炼学生的动 手能力, 但实验误差大, 过程复杂, 对实验设备要求 高, 而利用仿真分析, 则可以在很大程度上弥补其弊 端 。任晓路[11]在探索 ADAMS 运动学仿真过程中, 也表 明该分析软件在辅助教学过程中, 具有较好的应用价 值 。两者结论具有一致性 。邱海飞[12]在探究四连杆打纬 机构中, 利用 ADAMS 运动学仿真, 实现了对整个设计 系统的柔性化设计, 并提出了改进该机构动态特性的方 法 。王兴东等[13]在分析柔性构件及铰接间隙对整个机构 的影响中, 采用 ADAMS 运动学仿真分析, 验证了其仿 真结果的准确性, 同时也确当了连杆与机构之间的关联 性 。任泽凯[14]基于 MATLAB 和 ADAMS 两种软件对四连 杆进行仿真分析, 结果表明: ADAMS 仿真可靠性和准 确性高。
综上分析可知, ADAMS 仿真应用广泛, 其仿真结果 可靠性和准确性较高, 对于机械结构的设计和优化具有 重要作用 。而大部分学者对于 ADAMS 仿真的应用主要 根据设计者需要进行相应仿真, 而对于四连杆各个角度、 位移 、速度方面的力与力矩的分析相对薄弱, 因此, 本 文基于 ADAMS 仿真软件, 开展四连杆机构的运动学仿 真分析, 探究其仿真结果与实验结果异同, 进而得出 ADAMS 仿真对机械结构设计的影响。
1 平面四连杆机构仿真实例与理论计算
1.1 平面四连杆仿真实例
在机械原理课程中, 平面四连杆机构的设计尤为重 要 。能够熟练的分析常用连杆机构的运动特性即各重要 角度 、位移, 速度 、作用力 、力矩特性曲线等, 可为机 械创新设计类课程打下良好的基础, 更有利于机械类课 程的学习与提升[15- 16]。
在机械原理课程实验中, 涉及到平面四连杆的运动 学仿真分析实验 。要求学生通过 ADAMS 软件完成自主 建模 、添加约束 、添加驱动 、仿真 、优化设计参数等一系列操作完成四连杆机构的运动学仿真分析, 分析得出 四连杆机构的极位夹角 、传动角 、摆角, 速度 、加速度 等运动特性曲线 。在机械创新实验室中通常采用半圆仪 或量角器完成各个角度的测量, 其测量过程繁琐。
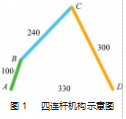
其次, 也可通过理论的方法推导计算各角度值 。实 验 中 各 杆 长 尺 寸 如 下: AB 杆 100 mm 、BC 杆 240 mm、 CD 杆 300 mm 、DA 杆 330 mm, 如图 1 所示 。其中极位夹 角 θ 即为原动件 AB 杆与连架杆 BC 杆两次共线时所形成 的夹角之差; 摆角 φ 即为AB 杆与 BC 杆两次共线时 CD 杆所在位置的夹角; 压力角 α 是 指不计算摩擦力的情况下, 受 力方向和运动方向所夹的锐 角; 传动角 ( γ ) 是指压力角 的余角, 通常用来描述机械机 构的传动性能, 取值范围一般 在 0°~90°, 如图 2 所示。
1.2 平面四连杆理论计算
平面四连杆杆长定律为最长杆与最短杆之和小于等 于其余两杆之和, 即为: 最长杆长度+最短杆长度≤其余 两杆长度之和 。即: AD+ AB=430≤BC+CD =540; 因此该 四连杆满足四连杆杆长定律。
极位夹角 θ 与摆杆 CD 摆角结合三角形勾股定理得出 计算公式:
θ min (C 1 AD) = arccos
θ max (C2 AD) = arccos
得: θ min (C 1 AD) = 53. 174 8°;
θ max (C2 AD) = 65.375 7°。
即极位夹角:
θ = θ max (C2 AD) - θ min (C 1 AD) = 12.200 9° φ max (C2 DA) = arccos φ min (C 1 DA) = arccos 得: φ max (C2 DA) = 65. 120 76°;φ min (C 1 DA) = 25.10178°。
即摆杆 CD 摆角:
φ = φmax (C2 DA) - φ min (C 1 DA) = 40.018 9°
通过以上推导计算得极位夹角的理论计算值为 θ = 12.200 9°, 摆杆 CD 摆角的理论计算值为 φ=40.018 9°。
2 平面四连杆机构运动学仿真
2.1 ADAMS运动学仿真分析
根据四连杆机构的平面图, 在 ADAMS 软件中建立 三维模型。
第一步: 设置工作环境 。将 setting 中 x 和 y 的间距调 为 10 mm 的工作网格 。该操作有利于后期建模时准确的 捕捉定位。
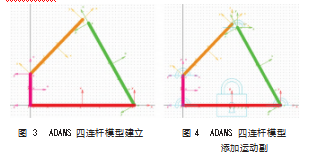
第二步: 建立几何模型 。在主工具栏 Bodies 下选择 Link单元, 分别建立四连杆机构AB=100 mm, BC=240 mm, CD=300 mm, DA=330 mm, 四 连 杆 机 构 建 立 好 后 点 击 wireframe, 使线框图显示为实体模型 。如图 3所示。第三步: 添加运动副约束 。该平面四连杆机构, 各 连接均为低副连接, 且均为转动副连接 。在主工具栏 commector 下 选 择 create a Revolute joint, 及 分 别 为 AB、 BC 、CD 、DA 相互连接处创建旋转副, 其中 BC 与 CD 转 动副连接处选择两个体两个点, 其余转动副连接选择两 个体一个点, 且将 DA 杆定义为机架与大地创建固定连接 约束 。如图 4所示。
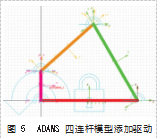
第 四 步: 添 加 驱 动 。在四连杆机构, 曲 柄AB 为主动件, 通过匀 速转动提供动力; 从动 件为摇杆 CD, 进行变速 往 返 摆 动; 连 杆 BC 在 平面中作复合运动 。 即 该四连杆机构原动件为AB 杆, 只有在 AB 杆上添加旋转驱动时, 整个四连杆机 构才能运动 。在主工具栏 Motions 下选择Rotational joint Motion 为 AB 杆与 DA 杆连接处添加旋转驱动, 并在 joint Motion 中设置 Function (time) 为 1d*time, 然后保存模 型 。如图 5所示。
第五步: 机构运动学仿真分析 。在主工具栏中选择 Simulation 下 的 Run an interactive, 并 设 置 结 束 时 间 为 360 s, 步长为 360 步, 点击运行, 仿真中可以通过改变 时间与步长来改变四连杆机构的转动速度。
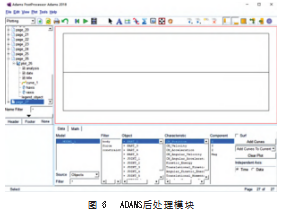
第六步: 后处理 。在 ADAMS后处理模块 Postproces⁃ sor 中可进行数据的显示与分析, 其得到的数据表格与数 据曲线图有利于分析机构设计的合理性 。在主工具栏中 选择 Results下的 Postprocessor进入 ADAMS后处理界面如 图 6所示。
2.2 仿真数据与理论计算结果对比分析
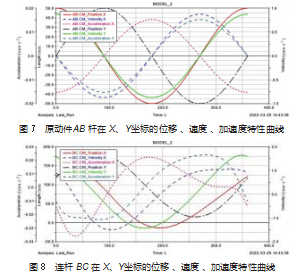
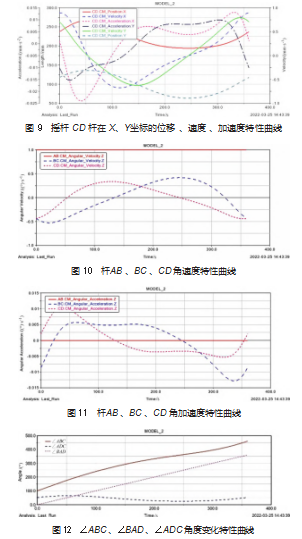
ADAMS 后处理有足够强大的测量功能 。通过 AD⁃ AMS 后处理可以测量位移 、速度 、角速度 、角加速度、 各点作用力与力矩变化特性曲线等 。如图 7~11所示 。通 过运动特性曲线图可以清晰地看出各运动学参数的变化 趋势与变化范围, 有利于判断机构设计的合理性。
AB 杆与 BC 杆两次共线时形成的夹角, 通过仿真得到, AB 杆与 BC 杆呈 180°和 360°时, 通过查找 ADAMS后 处 理 Postprocessor 模 块 中 图 12 所 示 的∠ABC 、 ∠BAD、∠ADC 角度的变化特性曲线对应的 table数据表可得, 当 ∠ABC1=179.7523° 时 ∠C1AD=53° 、 ∠ADC1=65.1206°, 当 ∠BAD=359.709°时∠C2AD =245° 、∠ADC2=25.102°, 即极 位夹角 θ 与摆角 φ 分别如下:
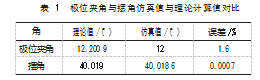
θ=∠C1AD-∠C2AD-180° =245°-53°-180°=12° φ=∠C1DA-∠C2DA=65.1206°-25.102°=40.0186°其理论计算值与仿真值对比如表 1所示 。通过表中 所示的极位夹角与摆角仿真值与理论计算值对比, 可以 发现其误差值非常小 。其极位夹角与摆角的误差主要是 由于在 ADAMS 软件中仿真时设定的步数所决定, 若取 值步数越多, 则产生的误差越小 。 因此 ADAMS 多体运动学仿真软件, 应用到机构运动学分析, 其仿真精度较 高, 能够较真实地反映机构的运动特性。
3 结束语
通过运用 ADAMS运动学仿真软件, 对平面四连杆机 构位移、速度、角速度、角加速度、各点作用力与力矩变 化的运动特性进行分析, 发现其仿真分析结果与理论计算 值相比其误差较小, 通过仿真分析能够真实地反映其运动 学的关键参数, 有利于机构设计合理性的验证, 并通过仿 真运动学可以更直观地观察其运动过程, 使整个连杆机构 设计中更加动态化、直观化、方便化和精准化, 提高了机 构设计的准确度与设计效率 。ADAMS运动学仿真软件引 用到工程上有利于缩短产品研发周期, 为产品的设计与制 造提供了一个可视化仿真环境, 降低开发成本与时间, 提 高了产品的质量 。将 ADAMS多体动力学仿真软件引用到 辅助教学上, 有利于学生对机构运动原理的掌握, 其对 常用连杆机构运动学的分析教学起到了重要的作用。
参考文献:
[1] 栾建举,杜茂华 . 基于 ADAMS 的机械四连杆机构运动仿真分 析[J]. 软件,2020. 41(2): 162-165.
[2] 张久雷 . 基于 Adams 的六足直立式步行机器人运动仿真分析 [J]. 机械传动,2020. 44(8): 147-152.
[3] 万丽荣,李哲,杨扬,等 . 结构参数和外载荷形式对放顶煤液压 支架的综合影响分析[J]. 矿山机械, 2020. 48(9): 13-17.
[4] 周凯红,张学谦,郭玉田 .基于 ADAMS和 ANSYS 的空间四杆引 纬机构优化研究[J].机电工程,2021.38(3):383-387.
[5] 王新海,陈志华 . 基于 ADAMS 的平面四连杆机构仿真分析[J]. 机械工程师,2018(6): 17-19.
[6] 余龙,秦东晨,武红霞,等 . 基于 Pro/E 和 ADAMS 的液压支架虚 拟样机建模与仿真研究[J]. 煤矿机械,2009.30(11):36-38.
[7] 叶天之,姚黎明 . 基于 ADAMS/CAR 的多连杆悬架系统运动分 析[J]. 制造业自动化,2019. 41(5): 106-110.
[8] 林国进,李华伟,冯超 . 基于 ADAMS 的平面四连杆机构仿真研 究[J]. 机电一体化,2011.17(8): 21-24.
[9] 王敏,何义川,王序俭,等 . 基于ADAMS的分流式平地残膜回收机四 连杆摇臂机构的研究[J]. 甘肃农业大学学报,2013.48(2): 135-138.
[10] 林国进,李华伟,冯超 . 基于 ADAMS 的平面四连杆机构仿真 研究[J]. 机电一体化,2011(8):21-24.
[11] 任晓路 . 基于 ADAMS 的四连杆机构运动学分析[J]. 机械管 理开发, 2018. 33(11): 117-119.
[12] 邱海飞 . 基于 ADAMS 的四连杆打纬机构动态设计与仿真 [J]. 机械传动,2011.36(7):52-55.
[13] 王兴东,陈波,孔建益,等 . 考虑柔性构件的含间隙机构动力学 分析[J]. 组合机床与自动化加工技术,2018(11):8-11.
[14] 任泽凯 . 基于 MATLAB 和 ADAMS 的四连杆机构运动仿真 [J]. 装备机械,2016(3):55-58.
[15] 叶天之,姚黎明 . 基于 ADAMS/CAR 的多连杆悬架系统运动 分析[J]. 制造业自动化,2019.41(5):106-110.
[16] 闫思江,李凡国 . 变杆长参数化四杆机构的运动学仿真[J]. 机 械传动,2011.35(12):46-48.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/56517.html