SCI论文(www.lunwensci.com)
摘要 :推拿是一种治疗和预防疾病的保健方法, 也被叫做中医按摩 。它对于保健和治疗都有很好的效果, 是传统中医治疗必不可 少的部分 。跟随技术进步的脚步, 按摩机器人的研究和开发也取得了一定进展, 越来越多的国内外学者和科研机构热衷于研究中 医按摩机器人 。 中医按摩机器人也呈现出与机器视觉 、大数据分析相结合, 按摩路径规划等多方面发展的特点 。但仍存在诸如按 摩效果不理想, 手法单一, 不够智能化等缺点 。未来的中医按摩机器人应在更加深入地分析传统中医按摩理论的基础上, 呈现出 结合软体机器人技术, 和新型多传感器信息融合以及融合现代智能机器人技术等多种发展方向的趋势 。针对按摩机器人的控制方 法, 介绍了其发展概况, 国内外现有的控制方法, 近 10 年来的发展特点, 目前存在的问题以及未来的发展前景和趋势。
关键词: 中医按摩,机器人,发展动向,现存问题,发展方向和趋势
Research Progress on Intelligent Control Method of Massage Robot
Yang Tengda, Li Minglin ※, Chen Zhigui, Zou Wenhao
(Fuzhou University, College of Mechanical Engineering and Automation, Fuzhou 350108. China)
Abstract: Tuina, a health care method for treating and preventing diseases, is also called TCM massage. It has a good effect on both health care and treatment, and is an indispensable part of traditional Chinese medicine treatment . Following the footsteps of technological progress, the research and development of massage robots have also made certain progress, and more and more scholars and scientific research institutions at home and abroad are keen to study traditional Chinese medicine massage robots . TCM massage robots also show the characteristics of multi-faceted development such as combining with machine vision , combining with big data analysis, and massage path planning. However, there are still shortcomings such as unsatisfactory massage effect, single technique, and lack of intelligence. The future TCM massage robot should present a trend of combining soft robot technology, new multi-sensor information fusion and integration of modern intelligent robot technology on the basis of more in-depth analysis of traditional Chinese medicine massage theory . The control method of massage robot, the overview of its development, the existing control methods at home and abroad, the development characteristics of the past decade, the current problems and future development prospects and trends were introduced .
Key words: traditional Chinese medicine massage; robot; development trend; existing problems; future development direction and trend
0 引言
按摩是一种预防和治疗疾病的医学方法 。它对于保 健和治疗都有很好的效果, 是传统中医治疗必不可少的 部分 。按摩是指医师在患者患处或特定穴位施用特殊手 法, 通过物理作用使得指定区域产生生理反应, 疏通经 络, 平衡人体机能, 达成治疗疾病的效用 。 中医按摩是 外治, 它能达到扶伤止痛, 祛邪扶正等疗效 。 中医按摩 可以增强人体的抵抗能力, 可作为一种普遍应用的保健 方法[1]。
基于中医按摩手法, 融入人工智能 、智能感知还有 机器人技术和现代康复医学, 产生了按摩机器人, 按摩 机器人能帮助或取代按摩医师进行常规按摩手法的动作, 还能用其精确的力/位置反馈控制让按摩手法更加规范 化, 按摩治疗效用更稳定 。近些年来, 国内外很多学者和科研机构都热衷于研究中医按摩机器人, 使其变成了 医疗保健研究领域的热点之一 。但是, 无论是在国内还 是国外, 中医按摩机器人的研究和应用只是处于起步阶 段, 还没有直接的技术标准可供引用[2-4]。
本文针对按摩机器人的控制方法, 介绍了其发展概述, 国内外现有的控制方法, 近十年来的发展特点, 目 前存在的问题以及未来的发展前景和趋势。
1 按摩机器人控制方法发展概述
近年来, 中国 、 日本 、美国和其他国家的多所高校、 机构和企业对按摩机器人产生了浓厚的兴趣[5]。
早在 1996 年, 日本 Masao Kume 等[6]就设计了具有 4 个自由度的机械治疗单元 ( MTU ), 它通过使用双循环控 制策略, 完成对肩部的按摩动作, 验证了开发智能按摩 机器人的可行性。
2003 年, 美国圣何塞州立大学也有学者[7] 对机器人 按摩理疗方面展开了相关研究 。他们通过 PUMA562 机器 人平台, 成功实现机器人在患者背部腰部的俯卧位进行 按摩的实验。
2003 年, 日本丰桥科技大学[8]基于位置控制和力控制, 提出了一种按摩运动控制系统 。通过对人类专家的 指尖力量数据进行测量, 然后对机械臂进行位置控制和 力控制, 复现人类专家的按摩手法 。通过仿真和实验, 证明了所提出的控制系统的有效性。
2003 年至 2007 年, 日本丰桥科技大学和日本岐阜工 业学院[9]开展了四指 、13 个关节的人形多指按摩机器人 研究 。本研究首次提出了一种基于人体按摩部位粘弹性 的按摩力设计方法, 为个性化按摩研究开辟了道路。
2004 年以来, 我国江苏大学和集美大学马吕忠教 授[10]开展了基于中医推拿理论的推拿机器人研究 。他们 设计了原理样机, 他们的研究重点是按摩机器人的机械 结构和按摩轨迹的研究。
自 2007 年起, 日本早稻田大学与朝日大学齿科研究 所共同开发了面部康复机器人“WAO”。该项目控制系 统由按摩路径发生器 、虚拟柔顺计算器和逆运动学计算 器组成 。对人脸进行扫描, 得到头部模型, 然后根据模 型分析结果和阻抗控制技术对患者进行面部按摩[11- 13]。
2007 年, 在机械工程系智能控制与机器人实验室, 韩国吉尔吉斯国立大学设计了两个人形按摩机器人的概 念模型[14]。
自 2008 年以来, 我国山东建筑大学卢守银[15]对于 “退行性腰痛中医中医推拿机器人”展开了研究, 和山东 康泰实业有限公司合作开发 JZMR I 、II 中医推拿人平台 和龙门式机构按摩机器人, 他们还尝试探索中医推拿研 究的专家系统。
2008 年以来, 我国北京航空航天大学 、长春工业大 学 、哈尔滨工程大学和江苏大学[16]联合开发了中医推拿 机器人, 机械臂有 4 个自由度, 可以完成 5 种中式按摩手 法 。可实现稳定的按摩力输出。
2009 年至 2010 年, 我国台湾大学[17- 18]提出了基于分 析肌电信息的多指机械手阻抗控制方法 。记录按摩时的 前臂肌电图, 根据人的感觉和按摩力之间的关系, 得到 了机器手在按摩时的合适输入命令范围 。最后实现了使 用多指机械手的有效且舒适的按摩。
2010 年, 我国山东建筑大学[19]将模糊控制策略应用 到按摩机器人的力度控制, 通过仿真对比不同控制器表 明: 模糊逻辑控制器在处理外界干扰的快速性和灵敏性 上明显优于 PID 控制器和原始 ( PD ) 控制器, 实现了预 期的工作性能。
2010 年, 以色列的 DreamBots[20]推出了具有倾斜传感 器技术的“WheeMe”按摩机器人, 该机器人可以检测身体在运动过程中的姿势 。按摩过程, 并根据身体姿势调 整控制策略, 使按摩机器人不会从身体上掉下来, 减少 按摩力。
可以发现, 10 年前对于按摩机器人的控制系统的研 究不多, 且大部分集中于力控制和机械臂的位姿控制, 但是仅凭这两个控制是难以做到完全复现按摩手法和实 现按摩效果的, 所以 10 年前的控制系统还是有较大的局 限性和不足的。
2 近 10 年按摩机器人控制方法发展方向
目前国内外关于按摩机器人的控制方法有很多, 实 现方法也多种多样, 本节将介绍国内外近 10 年来按摩机 器人控制方法发展方向。
2.1 机器视觉
近些年来机器视觉发展迅速, 有许多高校和研究机 构将机器视觉这项技术与按摩机器人相结合, 来推动按 摩机器人的进一步发展。
在 2014 年, 我国台湾大学[21]就提出使用点云数据为 机器人按摩应用生成人体轨迹。基于最先进的人体姿势识 别技术, 其开发了一种方法来建立相机和人体之间的关系 并生成指定的按摩轨迹。假设可以检测人体姿势并标记人 体的每个部位, 其使用 RANSAC 算法估计正面和矢状面, 并通过计算点云的最小惯性矩来对其进行细化 。实验结 果表明该方法为按摩轨迹生成提供了一种有用的方法。
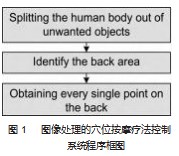
2018 年, 越南胡志明市科技教育大学[22]提出了利用 图像处理的穴位按摩疗法。其描述了使用图像处理的穴位 按摩疗法的研究, 并从图像数据中提取信息以控制自动化 机器或机器人按摩 。通过摄像头对扫描图像进行点提取 后, 将按摩理疗轨迹送至主控计算机进行智能控制, 按摩 线将被映射以支持按摩过程 。如图 1 所示 。该方法不仅适 合 每 个 人, 节 省 时 间,而且易于数据检索, 不依赖专业专家 。本研究基于实际需求, 实际应用非常广泛 。此外, 它将解决专家的耗时问题。此外, 随着自动化发展,按 摩 治 疗 的 质 量 更 高,并且过程将是连续的。
2019 年, 我国清华大学[23]提出了中医按摩机器人视 觉反馈系统 。示教或离线编程的方式在一般按摩机器人 中被广泛使用, 大大降低了机器人的灵活性 。人体一旦 移动, 定位不准确, 无法进行穴位的实时检测识别 。考 虑到腧穴体积小 、信息复杂, 该系统采用二维码进行腧 穴识别, QR 码以 1 cm×1 cm 的尺寸打印在 A4 纸上, 并 通过相机捕获 。至于识别, 设计了一种新的穴位定位二 维码, 具有 CRC 校验功能, 提出了一种新的二维码检测识别算法 。该系统设计了相机标定算法和距离测量模型, 将检测到的识别结果转换为世界坐标系 。测试中水平距离测 量 误 差 控 制 在 ±0.8mm 以内, 深度测量误差控制在±1.7 mm 以内。实验验证了算法的有效性 。如图 2 所示。
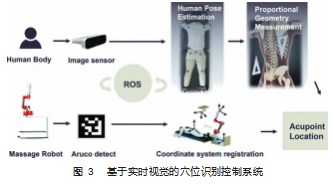
2021 年, 我国上海交通大学[24]提出了一种新型的基于实时视觉的中医按摩机器人穴位估计 。该方 法具有如下优点: ( 1 ) 全自动操作; (2 ) 适应性强; (3 ) 定位结果准确 。首先, 基于 SSTN (对称空间变换网络) 的深度学习可以稳定高效地获取人体关节 。其次, 比例 几何测量以骨关节为度量, 解构穴位与关节的几何关系, 得到穴位的精确二维估计 。最后结合坐标系配准方法和 深度信息完成了穴位的 3D 估计 。与传统方法相比, 此方 法可以完全脱离人工辅助, 对不同姿势、衣服和身体的人 有很好的适应性 。研究表明, 穴位精度平均可以达到 2.36 cm, 实时性能可以达到 14 fps 。如图 3 所示。
并且关于机器视觉与按摩机器人结合已经不只是停 留在理论阶段, 许多企业已经申请了相关的专利。
在 2018 年, 美的集团股份有限公司就申请了一项专 利《使用机器视觉的按摩机器》, 此专利通过提供一种使 用机器视觉以定位用于按摩的治疗部位的按摩机器人来 克服现有技术的局限性 。在该方法中, 按摩机器人包括 一个或多个机械手臂 、图像传感器以及控制系统 。图像 传感器采集用户的图像 。控制系统包括图像处理模块和 运动控制器 。图像处理模块对图像进行处理以在用户身 上定位治疗部位 。运动控制器控制机械手臂在所识别的 治疗部位上执行按摩程序 。突破了现有技术的局限, 通 过机器视觉定位, 确定按摩的治疗部位[25]。
2019 年, 武汉市的海沁医疗科技有限公司通过机械 手 、PC 机 、控制器 、视觉传感器 、驱动器等配合, 开发了能针对使用者背部不同的穴位进行按摩的系统, 申报 了专利 《一种基于视觉定位的按摩机器人穴位跟踪系 统》 [26] 。与现有技术相比, 本发明的有益效果是: 一种 基于视觉定位的按摩机器人穴位跟踪系统, 通过 PC 机和 控制器的配合, 通过驱动器和机械手的配合, PC 机通过 控制器控制驱动器进行工作, 机械手在驱动器的驱动下 能够完成按摩的动作, 通过图像采集装置和视觉传感器 的配合, 图像采集装置能够随着机械手一起移动, 摄像 机将使用者的背部拍摄下来, 在视觉传感器的传输下将 图像的信息传输给 PC 机, PC 机根据反馈回来的图像信 息做出相应的指令, 再次使控制器控制驱动器进行工作, 改变机械手的位置, 针对使用者背部不同的穴位进行按摩。
2.2 大数据
随着大数据时代的到来, 按摩机器人也正在向着大 数据的方向不断发展, 按摩机器人逐渐能够通过大数据 分析, 处理不同体型 、年龄 、症状等的患者。
在 2016 年, 我国山东建筑大学提出了中医按摩机器 人专家控制系统[27], 中医按摩机器人专家控制系统主要 是根据患者提供的基本信息, 通过适当的推理规则, 决 策出适合该患者的治疗方案, 同时结合传感器信息以及 上位机输入指令对按摩推拿过程进行实时控制 。本专家 控制系统主要由专家知识库 、动态数据库 、实时推理机、 人机交互 、信息获取 、执行机构等部分组成 。实验结果 证明了专家控制系统的可行性和可靠性。
在 2019 年, 深圳市司沃康科技有限公司申请了一项 专利《基于大数据的智能按摩系统》。 此控制系统提供一 种基于大数据的智能按摩系统, 能够根据用户的体型, 找准穴位进行针对性的按摩, 使得按摩效果更好, 用户 更加舒适[28] 。本发明的基于大数据的智能按摩系统中, 通过智能调节机构的设置, 使得在用户使用所述智能按 摩系统时, 能够对用户的提醒进行识别, 并根据用户的 体型而依据人体数据库中存储的最接近的体型数据, 控 制按摩头的移动, 然后针对用户的穴位进行按摩, 避免 了现有按摩系统按摩头位置固定, 不仅针对用户进行准 确的穴位按摩的弊端, 使得用户体感更加舒适, 且针对 穴位的准确按摩不仅使得用户得到放松, 还能对疾病起 到辅助治疗的治疗效果。
2.3 路径规划
近些年来, 也有不少高校和研究机构将目光放在了 按摩机器人的按摩路径控制上。
在 2016 年, 中国沈阳自动化研究所提出了基于中医 推拿疗法的足部按摩机器人轨迹规划, 介绍了一种足部 按摩机器人, 它再现了中国按摩专家的技术 。足部按摩 机器人的按摩过程主要包括从一个穴位转移到另一个穴 位, 并以按摩疗法确定的按摩手法对特定穴位进行按摩。通过轨迹规划算法生成一组序列点 。当机器人按摩特定 穴位时, 定位机构与进给机构配合 。仿真结果表明, 当 机器人从一个点转移到另一个点或机器人以指定的方法 按摩穴位时, 该算法可以有效地规划轨迹[29]。
2018 年, 我国西北工业大学提出了一种便携式人体 背部按摩机器人的设计和路径规划。为了实现按摩区域的 全覆盖, 需要按摩机器人在整个区域内按照轨迹运动。根 据设计目标, 所提出的按摩机器人需要完成敲击路径和滚 动 (揉捏) 路径。敲击路径是通过电磁感应使用按摩头的 按摩路径, 滚动 (揉捏) 路径是两个驱动轮的运动路径。 为进一步增加区域覆盖范围, 该方法在传统 boustrophedon 路径规划算法的基础上, 提出了一种高效的全覆盖路径 规划算法 。如图 4 所示 。程序启动时首先使用改进的 boustrophedon 路径规划算法 。算法可以标记所有过去的 区域 。如果前面遇到边沿或障碍物, 则采用缩回法 。否 则, 使用 BFS 算法搜索附近的未占用区域, 直到标记所有 规划区域 。此外, 一旦传统的 boustrophedon 算法与第一 覆盖路径重叠, 就会使用改进的 boustrophedon 算法[30]。
2.4 机器学习
随着人工智能时代的到来, 按摩机器人和机器学习 相结合也是大势所趋。
2017 年, 我国山东建筑大学提出了遗传算法优化 BP 神经网络在中医按摩机器人中的应用 。其为了提高中医 按摩机器人穴位寻找行为规划的精度, 提出了一种基于 遗传算法优化 BP 神经网络的中医按摩机器人穴位坐标预 测方法, 利用遗传算法优化 BP 神经网络分为: BP 神经 网络的结构确定 、遗传算法优化出最佳权值和國值 、BP 神经网络训练与预测 。其中, BP 神经网络结构确定是根 据输人输出参数个数来确定 BP 神经网络结构, 继而确 定遗传个体的长度 。使用遗传算法优化 BP 神经网络的 权值和國值, 每个个体需要通过适应度系数数来计算出 个体的适应度值, 遗传算法通过选择 、交叉和变异计算 出最优适应度值对应的个体 。利用遗传算法弥补 BP 神经 网络的缺陷, 提高神经网络的预测精度, 保证了中医按 摩机器人对患者做出精确的按摩治疗行为决策 。并对上 述方法进行了实现与仿真, 结果表明, 该方法对中医按 摩机器人寻找患者穴位坐标具有较好的精度和较高的预 测准确性[31]。
2020 年, 中国北京中科院提出了基于深度卷积神经 网络的穴位检测, 将人体关键点检测方法应用于穴位检 测, 并提出使用卷积姿势机 ( CPM ) 进行穴位检测, 因 为它在学习局部和空间特征方面具有良好的性能 。通过 采集人体图像构建穴位检测数据集 。其所提出方法的框 架, 包括特征提取器 、多级网络结构和损失函数 。人体 的原始图像和标记图像被输入到网络中 。在训练期间, 预测的热图由网络生成 。预测热图和地面实况热图之间 的损失是基于反向传播的损失函数计算的 。当模型收敛 时, 可以将测试图像输入网络以得到预测的热图 。最后, 在热图上找到响应值最大的点, 得到坐标作为穴位的位 置 。此外, 还提出了穴位检测的评价指标, 并进行了实 验 。实验结果达到了预期效果[32]。
在 2022 年, 我国华南理工大学提出了一种皮肤特征 不确定的机器人按摩智能控制系统[33] 。首先, 引入皮肤 动力学模型 ( SDM ) 来描述人体上的力变形作为力控制 的前馈 。然后, 粒子群优化 ( PSO ) 方法与基于图的知 识迁移学习 ( GKT ) 相结合 。经过研究, 这将有效地识 别个性化的皮肤参数 。最后, 设计了一种自整定阻抗控 制策略, 以适应在实际应用中存在皮肤动力学 、系统延 迟和信号噪声的不确定性 。将 GKT 集成到 PSO 识别算法 中, 设计了一种自适应阻抗控制算法 。因此, 机器人可 以了解其周围环境的纹理和生物属性, 并调整其规划活 动, 以便在机器人与人之间的动态接触期间进行稳定且 准确的力跟踪控制 。根据实验数据验证 PSO 和 GKT 的组 合提高了鉴定结果的准确性和收敛性 。如图 5 所示。
2.5 发展特点
从上述文献和专利中可以看出, 按摩机器人控制方法近 10年来发展最大的特点便是与现代机器人技术相结 合, 其中包括了机器学习, 人工智能算法, 机器视觉等。 利用机器视觉技术能够针对不同的患者和姿态来调整按 摩手法, 使得按摩机器人的按摩手法更加精准; 利用机 器学习能够使按摩机器人不再需要人工的辅助; 大数据 算法可以让按摩机器人更加智能化不只局限于机械按摩。 如图 6 所示。
3 目前存在的问题
如今按摩机器人控制方法的研究百花齐放, 但是依 旧存在着一些共同的问题。
( 1 ) 按摩效果不理想, 与实际按摩效果有着较大的 差距 。 目前按摩机器人的按摩手法都较为生硬, 按摩舒 适性差, 目前的控制方法都主要集中于位置精度控制和 力度控制, 但实际的按摩手法比这复杂得多, 与真正的 按摩手法有着较大的差异。
( 2 ) 目前现有的按摩机器人手法都较为单一, 一台 机器人手法只能做到一种或是几种, 相较于实际的人工 中医按摩, 一个按摩技师能完成十几种甚至是几十种的 按摩手法, 这也是按摩机器人难以产业化的原因之一。
( 3 ) 不够智能化, 现有的按摩机器人都较为机械式, 即使现在的控制方法已经有了智能化的趋向, 但是与实 现真正的智能化还差比较大的差距, 做不到通过使用者 实时的感受反馈来及时自主的改变按摩力度和按摩手法; 做不到在按摩的不同治疗阶段变换所需的力度和手法; 以及无法针对不同的人群采取不同的按摩力度和手法 。 这些都是现有的按摩机器人难以做到的。
( 4 ) 实用性不强, 功能单一 。 目前大部分按摩机器 人控制方法功能都较单一, 基本只能实现一两项功能, 实用性有待提高, 功能性有待增加。
4 未来发展方向和趋势
为了能够真正地研究出能代替传统人工中医按摩的 机器人, 且其更具有安全性 、实用性, 以及起到真正的 治疗效果, 中医按摩机器人控制方法未来的发展方向和 趋势应如下。
( 1 ) 更加深入地分析传统中医按摩理论 。传统中医 按摩理论是中华文明上千年历史传承下来的瑰宝 。 中医 按摩属于外治, 它能达到扶伤止痛, 祛邪扶正等疗效 。 中医按摩可以增强人体的抵抗能力, 可作为一种普遍应 用的保健方法 。与传统中医按摩理论更好地融合能够帮 助中医按摩机器人真正做到治疗效果。
( 2 ) 结合软体机器人技术 。软体机器人技术是现在 热门的前沿科研方向, 软体机器人相对于刚体机器人有 诸多好处, 如其使用具有与软生物材料相似的柔顺性材 料的优点包括显着减少机器人系统可能无意造成的伤害, 增加了它们与人类互动的潜力 。软体机器人不同于刚体 的控制, 柔软的材料可以弯曲 、扭曲 、拉伸 、压缩 、扣 合等, 具有较好的弹性, 不局限于平面运动 。这种运动 被视为提供了无限的自由度, 为模拟传统中医按摩手法 提供了更多的可能[34]。
( 3 ) 新型多传感器信息融合 。利用多种新型传感器, 将其信息融合, 及时反馈给控制系统, 使得机器人能够更好地实现传统中医按摩手法 。以及利用新型生物传感 器达到动态监测人体的血压 、血液酸碱度 、血糖浓度等 的效果[35], 使按摩机器人能够根据人体的身体状态更好 地调整按摩力度和按摩手法。
( 4 ) 融合现代智能机器人技术与中医按摩机器人 。 如今现代智能机器人技术随着计算机技术的发展日新月 异 。提出借助于智能感知 、互联网 、云存储等新技术, 将中医药典籍等一切中医知识 、经验转化为数据, 所形 成的中医大数据将为中医智能化提供丰富的经验基础;深 度学习 、人工神经网络和蒙特卡洛搜索树等机器学习技 术将为中医智能化提供可行的技术手段[36] 。将中医按摩 机器人与其技术融合, 使得中医按摩机器人实现智能化 并真正做到代替人力。
5 结束语
现如今中国已进入老龄化社会, 并且处于快速老龄 化阶段, 目前老年腰部和腿部的疼痛是最为严重和普遍 的困扰老年人的主要病痛[37] 。快节奏的生活里, 人们每 天都在不断忙碌, 将会导致人们身心俱疲, 严重的还会 产生各种各样的疾病 。对此, 中医按摩可以减缓机体的 疲劳感, 间接提高了生活质量和工作效率[38] 。 因此中医 按摩机器人的研制将对医疗服务领域和机器人行业有着 深远的影响和划时代的意义。
参考文献:
[1] 谢俊 . 中医推拿机械臂的机构设计及运动仿真[J]. 工程设计学 报,2011. 18(5):344-348.
[2] 高焕兵,鲁守银,王涛,等 . 中医按摩机器人研制与开发[J]. 机器 人,2011.33(5):553-562.
[3] 刘玲云,鲁守银, 张营,等 . 中医按摩机器人专家控制系统的研 究[J]. 计算机测量与控制,2016.24(4):55-57.
[4] 胡磊 . 按摩机器人关键技术研究[D]. 哈尔滨:哈尔滨工程大学, 2015.
[5] Zhang Y,Zhang W. Recent Patents on Chinese Massage Robot[J]. Recent Patents on Engineering,2017. 11(3):156- 161.
[6] M Kume, Y Morita, Y Yamauchi, et al. Development of a mecha⁃ notherapy unit for examining the possibility of an intelligent mas ⁃ sage robot[J].IEEE Intell. Robots Sys., 1996(8): 346-353.
[7] K C Jones, W Du. Development of a massage robot for medical therapy[J]. IEEE/ASME Int. Conf. Adv. Intell. Mechatron., 2003: 1096- 1101.
[8] Panya Minyong,T Miyoshi,K Terashima,et al.Expert massage mo⁃ tion control by multi-fingered robot hand[C]//Proceedings 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems,2003 .
[9] K Mouri, K Terashima, P Minyong, et al. Identification and hybrid impedance control of human skin muscle by multifingered robot hand[J].IEEE Intell. Robots Sys, 2007(12):2895-2900.
[10] L Ma. Based on a new type of parallel mechanism of traditional Chinese medicine massage robot[J]. Chi. Mech. Eng., 2004(15): 1475- 1478.
[11] H Koga, Y Usuda, M Matsuno,et al. Development of oral rehabil⁃ itation robot for massage therapy[J]. IEEE 6th Int. Spec. Topic Conf. JTAB, 2007(12):111- 114.
[12] H Koga,Y Usuda,M Mstsuno,et al. Development of oral rehabili ⁃ tation robot wao- 1r designed to provide various massage tech⁃ niques[J]. IEEE 11th Int. Conf. Rehabil. Robotics, 2009 (8): 457-462.
[13] Ishii Hiroyuki, Koga Hiroki, Obokawa Yuichi, et al. Path genera⁃ tor control system and virtual compliance calculator for maxillo ⁃ facial massage robots[J]. International journal of computer as ⁃ sisted radiology and surgery,2010.5(1).
[14] C Kang, B Lee, I Son, et al. Design of a percussive massage ro ⁃ bot tapping human backs[J].IEEE Int.Conf. Robot Human Inter⁃ act. Commun., 2008(1):962-967.
[15] G Du, S Lu, H Zhang.The Chinese medicine massage robot body acupoints for function design[J]. Report Sci. Technol, 2011(27): 553-562.
[16] Z Wang, Z Pang, B Zhang, et al. Modeling and simulation of the humanoid massage robot armbased on solidworks and ADMAS [J]. 2012(101- 102):635-639.
[17] R C Luo, C C Chang, YiWen Perng. Impedance control on a multi-fingered robot hand based on analyzed electromyographic information for massage applications[C]//2009 IEEE Internation⁃ al Symposium on Industrial Electronics, 2009.
[18] R C Luo, C C Chang. Electromyographic signal integrated robot hand control for massage therapy applications[C]//2010 IEEE/ RSJ International Conference on Intelligent Robots and Sys ⁃ tems, 2010.
[19] 王洪玲, 刘存根 . 基于模糊控制器的按摩机器人的力度控制 [J]. 山东建筑大学学报, 2010(6):5.
[20] Milpitas: Dreambots LTD[Z]. 2015 Available from: http:// wheeme.com/our-method-your-relaxation/
[21] R C Luo, S Y Chen, K C Yeh.Human body trajectory generation using point cloud data for robotics massage applications [C]// 2014 IEEE International Conference on Robotics and Automa⁃ tion (ICRA),2014.
[22] N T Thanh Phong,V HPhat,T C Toai,et al.A Study of Predicting Human Points and Massage Therapy Lines Using Image Pro ⁃ cessing[C]//2018 International Conference on System Science and Engineering (ICSSE), 2018.
[23] K Sun, Q Zhao,Z Yang, et al. Visual Feedback System for Tradi ⁃ tional Chinese Medical Massage Robot[C]//2019 Chinese Con⁃ trol Conference (CCC) ,2019.
[24] W Hu, Q Sheng, X Sheng. A novel realtime vision-based acu ⁃ point estimation for TCM massage robot[C]//27th International Conference on Mechatronics and Machine Vision in Practice(M2VIP),2021.
[25] 顾海松,王冬岩 . 使用机器视觉的按摩机器人: CN111343958 A[P].2020.
[26] 潘晓海 . 一种基于视觉定位的按摩机器人穴位跟踪系统 : CN110882150A[P]. 2020.
[27] 刘玲云 . 中医按摩机器人专家系统的研究[D]. 济南:山东建筑 大学, 2016.
[28] 马志云 . 基于大数据的智能按摩系统 : CN201910172730.2 [P]. 2019.
[29] Lin W,Wang H,Ma D,et al.Trajectory planning for a foot massage robot based on Chinese massage therapy[C]// IEEE International Conference on Cyber Technology in Automation,IEEE,2016.
[30]Wang W,Zhang P,Liang C,et al.Design,path planning improve⁃ ment and test of a portable massage robot on human back[J]. International Journal of Advanced Robotic Systems, 2018. 15(4):1- 11.
[31] 张秋云, 张营, 李臣 . 遗传算法优化 BP 神经网络在中医按摩 机器人中的应用[J]. 应用科技, 2017. 44(2):5.
[32] Sun L,Sun S,Fu Y,et al.Acupoint Detection Based on Deep Con ⁃ volutional Neural Network[C]// 2020 39th Chinese Control Con⁃ ference (CCC). 2020.
[33] Zhai J,Zeng X,Su Z.An intelligent control system for robot mas ⁃ saging with uncertain skin characteristics[J]. Industrial Robot,2022(4):49.
[34] Rus D L,Tolley M T.Design, fabrication and control of soft robots [J].Nature, 2015. 521(7553):467-475.
[35] 佟巍, 张纪梅,佟长青 . 生物传感器在医药领域中的应用研究 [J]. 中国临床康复,2006(5):125- 127.
[36] 黄欣荣,钟平玉, 马纲 . 人工智能与中医智能化[J]. 中医杂志, 2017.58(24):2076-2079.
[37] 匡俐辉 . 中医按摩机器人串联机械臂的设计与研究[D]. 镇江: 江苏大学, 2011.
[38] 任武 , 陈秋冰 , 崔雅静 ,等 . 肢体康复机器人研究现状及进展 [J]. 新乡医学院学报, 2018. 35(8): 743-745.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/56456.html