SCI论文(www.lunwensci.com)
摘要:六足机器人是足式机器人最基本形式之一, 其不仅具有丰富的步态还有时变拓扑的特点, 而这些特性也使它对障碍 、沟渠 等复杂特殊地形具备较好的通过能力与适应性, 被广泛应用于太空探测 、海底资源开发 、灾害现场搜救 、军事侦察等领域, 具有 广泛的应用前景 。 目前对于六足机器人的研究仍然处于起步阶段, 可借鉴的成熟技术较少, 因此有必要针对现有的研究成果进行 较为系统的分析和总结, 为今后六足机器人的深入研究奠定基础 。对国内外六足机器人的研究现状进行了总结和介绍, 针对机体 和单足结构设计 、步态规划 、腿部轨迹规划等多个方面深入总结分析, 并对六足机器人未来的发展以及应用进行了展望。
关键词:六足机器人,避障,步态规划,协调控制
Review on Key Technology of the Hexapod Robot
Chen Siqin1. Li Siyao1 ※, Lu Zhigang1. 2. Guo Zhongyi1. Xie Ziguo1
( 1. Yunnan Aerospace Industry Co., Ltd., Kunming 650217. China; 2. School of Aerospace Engineering, Beijing University of Aeronautics and Astronautics , Beijing 100191. China)
Abstract: Hexapod robot is one of the most basic form foot type robot, it not only has a wealth of gait and the characteristics of time-varying topology, and these characteristics also make its channels of barriers, such as special terrain has better capacity and adaptability. So it is widely used in space exploration, marine resources development, disaster site search and rescue, military reconnaissance and other fields, and it has wide application prospect. The research on hexapod robot is still in its infancy, and there are few mature technologies that can be used for reference. Therefore, it is necessary to systematically analyze and summarize the existing research results , laying a foundation for further research on hexapod robot in the future. The research status of hexapod robots at home and abroad was summarized and introduced, and the body and monopod structure design, gait planning, leg trajectory planning and other aspects of in-depth summary and analysis, and the future development and application of hexapod robots were prospected .
Key words: hexapod robot; obstacle avoidance; gait planning; coordinated control
0 引言
随着科学技术的发展, 有关机器人的研究已经不再 局限于定点环境的应用, 而是逐渐向太空探测 、海底资 源开发 、灾害现场搜救 、军事侦察等领域发展[1-2] 。 由于 需要适应多种不同领域及地势环境, 足式机器人相较于 履带式和轮式机器人的优势日益凸显[3-4]。
不仅能在移动过程中自由选择支撑点, 还能随时进 行自身的姿态调整以保持机身稳定[5], 因此能够在实际 应用中显示出较好的机动性与灵活性[6-8] 。以昆虫作为仿 真对象的足式机器人是足式机器人最基本的形式之一, 根据其腿部的数量可分为单足 、双足 、四足 、六足 、八 足等, 其中六足机器人以较好的稳定性 、灵活性与承载 能力以及相较于八足机器人更为简单的结构, 成为了适 应复杂环境下工作的最优机器人构型[9- 10]。
针对六足机器人, 国内外相关学者在结构仿真 、步 态规划 、足部之间协调控制等方面取得了突破性的研究进展, 也研制出了适应不同工作条件的六足机器人, 初 步实现了六足机器人的仿生运动 。但现阶段, 有关六足 机器人的研制仍存在诸多问题需要攻关, 例如: 现阶段 六足机器人行走过于机械, 并不能完成复杂的仿生运动, 对于地形的适应能力不足等 。为此, 本文在简要介绍六 足机器人研究进展的基础上, 着重调研其关键技术, 旨 在为六足机器人后续研究做相关理论支撑。
1 国内外研究现状
1.1 国外发展现状
20 世纪 60 年代, 国外研究机构开始关注六足机器人 系统开发 。最初为了进行人机交互的研究, 罗马大学 Petternela 等人研发了首款电动六足机器人 。同样诞生于 20 世纪 60 年代初的仿生学 ( Bion-ics), 是生物科学和工 程技术相结合的一门学科, 通过学习 、模仿 、复制和再 造生物系统的结构 、功能 、工作原理等来改进现有的或 创造新的机械 、仪器 、建筑和工艺过程 。现代仿生学已经延伸到很多领域, 机器人学是其主要的结合和应用领域之一, 这方面的研究引起各国相关研究人员和专家的极大兴趣和关注, 取得了大量 可 喜 成 果 和 积 极 进展[11] 。通过模拟自然界中昆虫的行走及转向方式, 美国俄 亥俄州立大学 Robert MC Ghee 等[12]设计出了全球首款仿生 六足机器人 OSU Hexapod 。而基于仿真六足动物的机器人 还有 Tarry[13]系列机器人, Robot[14]系列 、TUM[15- 16]机器人 等, 其中以竹节虫为仿生对象, 科学家们研制出在崎岖地 形下具有综合步行能力的机器人 Hamlet[17] 。如图 1 所示。
随着星球勘探技术的研究深入, 一批以星球探测及 物资输运为目的机器人也相继被科学家们研制诞生 。其 中, 早期的有于 1989 年研制的机器人 Genghis[18]及 1990 年诞生的 AMBLER[19]六足星球探测机器人 。其中 Genghis 也是全球第一个智能化的仿昆虫机器人, 其腿部具有 2 个自由度, 通过足端的 6 个脚力传感器和 2 个触觉传感 器, 该机器人可以实现崎岖路面上的自主学习, 具备一 定的越障能力。
迄今为止较先进的六足机器人为隶属美国太空总署 ( NASA ) 的喷气动力实验室 (JPL) 研制的 ATHLETE 以 及由德国宇航中心 ( DLR ) 在 DLR-HandⅡ基础上改进 的可搭载于大型移动设备的微小型六足机器人 DLR- Crawler 。如图 2 所示 。ATHLETE 主要用于为登月人员进 行物质输运工作, 完成指定勘察探测任务 。该机器人为 轮腿构型, 有较好的地形通过能力, 整体结构为正六边 形, 机体的每一个拐角处布置一条腿, 车轮在腿末端, 对于不同的作业情况可以对操作腿末端进行更换 。如图 3 所示 。机器人 DLR-Crawler 用高集成度的 DLR 机械手指 作为腿部系统, 减小了体积和重量, 其腿部集成有完备 的传感器系统, 躯干装备有加速度计和陀螺仪以及双目视 觉机构进行局部路径规划 。 目前, DLR-Crawler 为集成度 最高的一款机器人[20-21]。
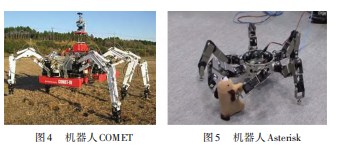
21 世纪初, 随着科学技术的发展, 有关灾害现场搜 救 、军事侦察等领域机器人的研究也有了长足的发展 。 日本千叶大学研制出一款适用于野外排雷 、抢险救灾场 景的机器人 COMET 。如图 4 所示 。COMET 腿部关节采用液压驱动方式, 为了使其具有良好的承载能力, 每条腿 由三个自由度组成 。该机器人现已研制出四代, COM ⁃ ET- Ⅳ为最新款[22] 。 日本大阪大学工程科技研究所研制 了一款基于已知模型且能够用于灾害搜救和隧道顶部检 查的综合性机器人 Asterisk 。如图 5 所示 。该机器人的躯 干为圆形, 肢体呈中心对称分布, 每条腿由舵机驱动且 有 4 个旋转自由度, 足端置三维力传感器, 躯干装三轴 加速度计和两轴陀螺仪[23]。
此外, 21 世纪初期诞生的Lauron Ⅳ[24]城市救援系列 机器人 、SIL-06[25]野外监测及排杀伤性地雷机器人 、用 于探测地形的 Spider-bot 等都为后期作战及抢险救灾类 机器人的研究奠定了基础。
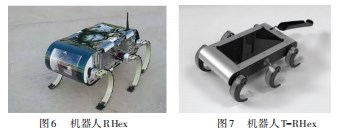
除了使六足机器人具有良好的承载能力之外, 提高 其运动能力以及轻量化设计也是六足机器人研究的重点 和热点 。C 形腿六足机器人 RHex[26-28]为其中的典型代表, 在具有良好的地形适应性的同时还能保证较快的行进速 度, 能够很好地完成战场侦察的工作 。如图 6 所示 。其 腿部仅有 1 个自由度且具有柔顺性, 由于其结构简单 、 性能优良, 很快就引起了关注, 同时 RHex 的出现也改 变了人们对于六足机器人笨重 、低效的认知, 也为后续 的六足机器人的开发和研制提供了新的思路 。 Scien⁃ ceParrot 团队于 2019 年在 RHex 的基础上设计研发了新版 本 T-RHex, 如图 7 所示 。除了继承了原版 RHex 的特性 之外, 其尾部还设置了防止向后倾斜的装置 。腿上细小 的锥型脚趾使其能够悬挂于陡峭的山坡, 最大爬坡角度 达到 55°, 还可紧贴地附着在 135°的斜坡表面。
为了满足水底军事作业需求和抢险救援的需求, 一 些能够适应水下工作条件的六足机器人应运而生 。如图 8 所示 。用于浅滩地雷探测的六足机器人 Ariel[29]可以进 行类似于螃蟹的横向运动, 为了满足水下作业的需求, 其控制器及驱动电路均封装在防水设备中 。 同时为了降 低浮力, Ariel 的设计使水可以从其体内流入 。其腿部具有两个自由度且具有较大的转动范围, 在被海浪打翻的 情况下也能正常的行走 。如图 9 所示 。巨型水下作业机 器人 Crabster CR200[30]主要用于参与水下救援工作, 是目 前全球最大的水下机器人, 其腿部具有 30 多个关节, 需 要 4 名驾驶员控制, 能够适应复杂的水下气候条件 。用 于进行海床垃圾的龙虾六足机器人 SILVER2. 该机器人 通过使用防水外壳中的新型腿部稳定模块来保持平衡, 能够适应各种海洋环境下的作业需求, 其行走时的稳定 工作时间可达 7 h 。具有自主水下步行能力的六足防蟹机 器人 ALUV[31]具有两栖运动功能, 在海浪太大时可将足 部埋入沙中防止被冲走。
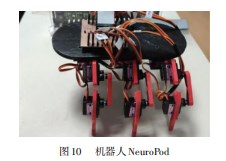
科学技术的进步也使得机器人的环境适应能力大大 提升 。在最新的研究中, Gutierrez-Galan[32]等人利用 3D 打印技术创造了一款六足机器人 NeuroPod, 如图 10 所 示, 该机器人利用内置的集成人工神经网络进行步态转 换, 能够在行走 、小跑和奔跑的步态之间平稳切换。
1 .2 国内发展现状
六足机器人由于其广阔的应用前景, 在国内引起了 众多科研机构的重视, 但是相较于国外而言, 我国在六 足机器人的发展道路上起步较晚 。20 世纪 80 年代我国开 始进行该方面的研究, 最早的文献资料要追溯到中科院 长春光学精密机械研究所对六足机器人理论及实验方面 的研究[33] 。后续哈尔滨工业大学 、北京航空航天大学 、 华中科技大学 、北京理工大学和上海交通大学等科研单 位逐渐开展了关于六足机器人样机的研制 。近年来, 国 内在六足机器人的研究领域内已取得了显著的成绩。
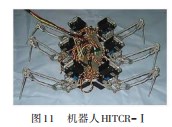
2006 年由哈尔滨工业大学机器人研究所研制的HIT⁃ CR- Ⅰ[34], 旨在用于野外侦察工作 。其腿部采用复合四 连杆机构, 由舵机驱动且舵机位于躯干上, 有效减少了 腿部的转动惯量 。如图 11 所示 。HITCR- Ⅰ 机器人的控制系统基于 ARM 芯片, 通过基于 Cruse 步态规则产生自 由步态实现全方位移动 。该机器人作为一个研究平台, 实现了理论研究和实验验证相结合, 为下一代六足机器 人的研制提供了理论基础, 最为重要的是其为下一代结 构优化提供了现实指导。
六足机器人 Octopus[35]于 2013 年由上海交通大学高 峰研究团队研制, 其具有重大的意义——在核电站等核 辐射环境下进行紧急救灾 。如图 12 所示 。Octopus 最大 的特点是其腿部采用并联结构且包含 3 个支链: 1 个 UP 链, 2 个 UPS 链 。 由于采用该结构, 机器人 Octopus 的承 载能力显著增强 。Octopus 机身采用完全对称设计, 具备 全方位快速运动能力和较强的抗干扰能力 。基于上述能 力, Octopus 便能代替人类进行危险环境作业, 除此之外 Octopus 还具备多种环境适应能力。
除了 Octopus 之外, 该团队所研发的“青骓”[36]也是 国内比较具有代表性的六足机器人之一 。如图 13 所示。 其主要用于探测灾后环境, 搬运救灾物资, 清除障碍物 以及灭火等作业任务等, 具备一定的负载能力 。该机器 人采用自主开发的电机传感符合驱动, 实现了力觉动态 控制行走, 同时 3-3 步态行走方式也使其具有更高的行 走稳定性。
在六足机器人研制过程中也诞生了一些对地形适应 能力较好的机器人样机, 例如: 月球表面探测的机器人 NOROS- Ⅱ[37], 其腿部采用了轮腿混合式结构, 除了 3 个 驱动关节以外, 在其膝部还配备一个移动轮的驱动关节, 腿部足端向躯干内侧收缩时移动轮可着地并投入使用 。 这样的结构设计有效提高了 NOROS- Ⅱ 的行走能力 、运 动稳定性 。仿真电驱动六足机器人 E1Spider[38]能搭载 155 kg 的重物, 载荷自重比达 50%, 可攀越斜坡的角度 达到 35°。
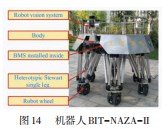
北京理工大学 Chen[39]等人在其团队设计研发的一代 四足机器人“哪吒”的基础上进一步开发了 BIT-NAZA-II 六足机器人 。如图 14 所示 。该机器人在平坦路面时采 用轮式运动, 速度快 、能源效率高; 在复杂路面时采用 足式运动, 环境适应性强 、越障能力好 。该机器人通过 控制 Stewart 平台的垂直自由度来调整机器人的整体姿 态, 同时解决了腿悬架问题 。该机器人具有很强的负载 能力和环境适应性, 能够很好地完成抢险救灾 、物资运 输 、资源勘探等任务。
2 六足机器人关键技术
2.1 机体和单足结构设计
六足机器人机体结构设计主要考虑足部的布置形式, 常见的布置形式包括矩形布置[40] 、椭圆形布置和圆周布 置[41] 。选择合适的机体结构并合理布置六足的位置, 能 够增加运动的稳定性, 减小步行过程中各腿之间碰撞的 可能性, 保证足间的协调性能和腿部的活动空间, 同时 有利于各腿足端力的平均分布[42]。
在进行单足结构的设计时, 大多数的六足机器人会 选用 3 自由度单足, 这类单足结构主要由基节 、股节和 胫节构成, 每个关节能够做单自由度的旋转 。一些机器 人在设计时为了简化结构与控制, 会选用自由度小于 3 的少自由度单足 。例如水下六足机器人 AQUA[43] 、具有 单自由度足式结构的六足机器人 SensoRHex[44] 、具有两 自由度单足结构的六足机器人 Kafka[45]等 。若需进一步提 高六足机器人的运动性能, 则需要增加足部的自由度, 如 ATHLETE 在单足末端增加了一个可旋转的关节以调 整足端姿态, 从而提高机器人的地形适应能力。
2.2 步态规划
步态的规划的目标是通过有效控制六足机器人腿间 相序以生成适于不同地形全方位移动的自由步态, 是六 足机器人理论研究中的核心内容 。面向非结构化环境, 要求规划的运动具有良好的适应性和鲁棒性, 如何设计 多足机器人的腿间作用机制, 实现崎岖地形条件下的腿 间相序实时自适应调整, 生成静态稳定的自由步态, 满 足在崎岖地形下高效 、稳定的避障需求是关键问题 。 目 前较为常见的步态规划方法有三角步态法 、四足步态法 和五足步态法或称波浪步态法[46]。
2.2. 1 三角步态
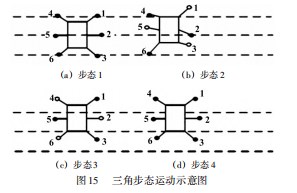
三角步态是六足类昆虫使用最频繁的一种步态[47]。 在采用三角步态进行移动的过程中, 需要始终有 3 条腿 保持支撑状态, 其在地面的位置构成一个三角形, 机器 人的重心就处于这个三角形之中; 另外 3 条腿处于摆动 状态 。 由于机体的重心落在三角支架内, 使得这种行走 方式具有较大的灵活性和较高的稳定性[48] 。在进行步态 规划时需要将相间隔的机械足分为一组, 分别是 1 、3、 5 为第一组, 2 、4 、6 为第二组 。在进行移动的过程中两 组腿交替作为支撑腿和摆动腿, 即可完成机器人的移 动[49], 如图 15 所示。
2.2.2 四足步态
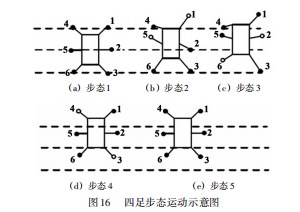
在采用四足步态运动[49]的过程中, 始终有 4 条腿同 地面接触 。 由于接触地面的支撑点数量增加, 采用这种 步态运行的机器人较采用三角步态的机器人稳定性更高, 负载能力也较强, 缺点是移动速度较慢 。在进行步态规 划时需要将 6 条腿分为三组, 第一组是 1 、5. 第二组是 2 、6. 第三组是 3 、4 。在移动过程中第一组 、第二组、 第三组腿按顺序作为摆动腿执行向前摆动, 其余腿作为 支撑腿保持机体的稳定, 即可完成六足机器人的运动, 如图 16 所示。
2.2.3 五足步态法 (波浪步态法)
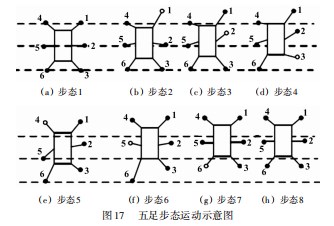
采用五足步态法[49]的机器人在运动过程中始终保持 5 条腿与地面接触, 这种机器人的稳定性最强, 负载能力 最强, 但同时移动速度也最慢 。在行走时 6 条腿按照标号 顺序依次前进, 其余腿作为支撑腿, 如图 17 所示。
2 .3 腿部轨迹规划
腿部轨迹规划的目标是让机器人在各种地形条件下 行走时能够选择稳定有效的落地点, 使其能够满足平坦或 轻度崎岖地形下的快速前进的步行要求和重度崎岖地形下 的越障要求。具有良好的足端起落、速度和加速度特性的 腿部轨迹, 能够保证机器人步行时的连贯性和稳定性[50]。
在进行腿部轨迹规划时, 常用的方法有直线段[51]、 抛物线[52] 、椭圆轨迹[53]和三次曲线[54]等, 这些方法可以 通过初等函数 、多项式插值等进行描述 。一次函数容易 组合成给定形状, 但在直线连接点处速度和加速度不连 续; 抛物线有利于避障, 但在起落时存在冲击现象[55]; 多 项式插值由于采样过多, 在多项式插值阶次过高时会有震 荡、行走不稳定等问题[56-57] 。经过研究发现, 三次样条曲 线能够满足轨迹曲线 1 阶 、2 阶可导和连续, 轨迹线平 滑 、阶次较低 、震动较小, 具有比较理想的行走性能[58] 。
2 .4 路径规划
路径规划是使机器人能完成自主移动且不与障碍物 发生碰撞情况下开展工作的关键步骤, 主要通过执行各类 路径规划算法来实现。按照路径搜索方式可将路径规划方 法分为基于图搜索、启发式搜索和基于采样的路径规划算 法三种[59] 。基于图搜索的路径规划算法中具有代表性的是 Dijkstra 算法[60-62]及 A*算法[63], 由于这种算法在进行规划 前需先获取完整的地形信息并对不同区域进行建模, 故只 适用于规模较小的地图, 且不能进行动态路径规划。基于 启发式搜索的路径规划算法能够根据接受准则更新当前状 态, 在动态路径规划中有一定优势, 代表算法有遗传算 法[64]和蚁群算法[65-66] 。基于采样的路径规划算法依赖于其 执行过程中对节点的采样, 能够较好的解决高维度复杂 规划问题, 代表算法有快速搜索随机树 ( RRT ) 算法[67]。
2 .5 位姿控制
为了使机器人能够在复杂崎岖的地形步行过程中保 持良好的稳定性和灵活性, 需要对机器人的位姿进行控 制 。常规的位姿控制由单纯的位置控制实现, 处于多足 步行机器人位姿的开环控制层面, 这种控制方法存在运 算复杂 、应用性差的问题[68] 。通过对脚力进行控制能提 高机器人位姿控制的准确性, 这种方法在 Warp1 四足步 行机器人[69] 、液压六足步行机器人 COMET-II[70] 、Big⁃ Dog[71]中均有运用 。虽然脚力控制能够在一定程度上起到 对位姿的修正, 但并没有实现机器人位姿的闭环精确控 制 。对需要适应复杂环境的机器人, 精确的位姿控制是 关键因素, 其中在 LittleDog 中的位姿控制效果明显, 其 核心部分是步态算法中专门的位姿规划器[72] 。但由于其 位姿信息是通过外设的运动捕捉系统获得, 对于自然环 境下的应用仍有一定的局限性 。 目前, 大多数的位姿控 制研究仍处于开环控制阶段, 闭环控制虽能初步实现但仍 不够成熟, 对于位姿闭环控制的深入研究是很有必要的。
3 展望
随着六足机器人研究的深入, 其在结构设计 、步态 规划 、轨迹规划等方面都取得了突破性的进展 。虽然在 研究的过程中开发了许多机器人样机, 但这类样机的活 动仍然局限于实验室条件, 对于真实环境条件下的运用 适应能力欠佳, 使得这类机器人难以大规模实际应用 。 为了解决以上问题, 未来可结合以下几方面展开研究。
( 1 ) 复杂地段的步态规划问题 。现有多足机器人步 态研究中所考虑的地形均为较常规的地形, 对于重度崎 岖地形 、松软地形等复杂的形下的步态规划研究相对较 少 。此外对于此类地形中的跌倒倾翻自动恢复 、重度崎 岖地形中机体的平衡问题 、泥泞沼泽中的脱泥脱土问题 等, 也需要进一步研究。
( 2 ) 步态规划的智能化问题 。现有的六足机器人都 是在确定周围环境的基础上进行步态规划, 但真实环境 下地形条件未知, 需要机器人使用智能化方法生成步态, 以实现在不同地形条件下步态的自动调整, 满足在不同 环境中的作业需求。
( 3 ) 腿部结构设计问题 。 目前大多数的步行机器人 所使用的腿部结构均为刚性结构, 由于在运行过程中的 碰撞, 机器人行走时的稳定性差, 同时腿部机构间摩擦 大, 使得机器人的使用寿命较短 。近年来对于柔性结构 的研究进一步深入, 该类结构已被大量运用在机械臂、 仿生机器人 、康复机器人等等 。实现六足机器人腿部的 柔性化设计, 能够有效的提高六足机器人行走的稳定性, 同时提高其使用寿命。
( 4 ) 高效的多足协调控制方法 。针对六足机器人的 多足协调控制, 目前多数的研究是从足端的轨迹规划和 机体的运动规划入手, 以实现机器人的行走功能 。但这 些研究中没有考虑机器人运动的整体性, 忽略了足端轨 迹规划和机体运动规划间运动耦合对机器人运动性能的 影响, 使得机器人的运动潜能得不到充分发挥[73] 。因此, 探索高效的多足协调控制方法, 寻求简化的控制算法, 是六足机器人技术发展的必然。
( 5 ) 可行 、稳定的多机器人协同控制和编队方法 。 多机器人系统是指若干个机器人通过合作与协调完成某 一任务的系统, 是当前机器人研究的一个重要方向[74]。 该系统利用局部信息的交换, 使得系统内的各个机器人 之间相互协同, 完成单个机器人难以完成的 、较为复杂 的任务[75] 。机器人编队控制的思想来源于自然界中动物 的生存 、捕食 、抵御外来攻击等, 可行 、稳定的多机器 人协同控制和编队方法能提高系统完成任务的能力和效 率, 使机器人在环境多变的状况下顺利完成规定的任务。
4 结束语
本文在对国内外六足机器人进行调研的基础上, 详 细讨论了六足机器人机体和单足的结构设计 、步态规划、腿部轨迹规划、路径规划和位姿控制等关键技术问题, 并 对六足机器人的发展进行了展望。总体上来说, 国内外对 于六足机器人的机械结构设计、步态规划、腿部轨迹规划 等方面均取得了突破性的进展, 但目前的六足机器人行走 过于机械且难以完成复杂的仿生运动, 使用寿命较短的问 题仍未很好的解决。大多数的六足机器人样机的工作环境 仍局限于实验室条件, 对于复杂地形下的适应能力较差, 难以运用于实际的工程作业。基于现有的研究成果, 针对 六足机器人研究中的关键问题, 需从腿部的仿生结构、位 姿的闭环控制、合理的路径规划和多机器人的协同控制等 方面进行深入的研究, 为设计运动性能优越的六足机器人 提供理论依据和技术支持, 尽最大可能挖掘其卓越的运 动潜能, 使六足机器人能够更好的适应复杂的工作环境。
参考文献:
[1] Oblak J, Cikajlo I, Matjacic Z. Universal Haptic Drive: A Robot for Arm and Wrist Rehabilitation[C]//Neural Systems and Reha⁃ bilitation Engineering,2010.
[2] Huang Q J, Nonami K. Humanitarian mine detecting six-legged walking robot and hybrid neuro walking control with position/ force control[J].Mechatronics,2003(13):773-790.
[3] Brown B, Zeglin G. The bow leg hopping robot[C]//Proceeding of the IEEE International Conference on Robotics and Automa⁃ tion. 1999.
[4] Raibert M H.Legged robots[J]. Communications of the Acm, 1986. 29(6):499-514.
[5] Ding L, Liu Y, Gao H, et al. Center of mass and its domain for heavy hexapod robots[C]//International Conference on Mecha⁃ tronics and Control,2015.
[6] Reina G, Foglia M. On the mobility of all-terrain rovers[J]. Indus⁃ trial Robot,2013.40(2):121- 131.
[7] Chen S C, Huang K J, Chen W H, et al. Quattroped:A Leg-Wheel Transformable Robot[C]//IEEE/ASME Transactions on Mecha⁃ tronics,2014.
[8] Neumann M, Predki T, Heckes L, et al. Snake-like,tracked, mobile robot with active flippers for urban search-and-rescue tasks[J]. Industrial Robot,2013.
[9] 干东英, 甘建国 . 步行机器人评述[J]. 机械工程, 1990(4):1-4.
[10] 陈学东, 孙诩, 贾文川 . 多足步行机器人运动规划与控制[M]. 武汉: 华中科技大学出版社, 2006.
[11] 张秀丽,郑浩峻, 陈恳,等 . 机器人仿生学研究综述[J]. 机器人, 2002(2):188- 192.
[12] MCGhee R. Vehicular legged locomotion, in: Advances in Auto⁃ mation and Robotics[M].New York:JAI Press, 1985.
[13] Buschmann A. Home of Tarry Ⅰ & Ⅱ : Design of the Walking Machine Tarry Ⅱ . World Wide Web[OL].http://www.tarry.de.
[14] Espenschied K S, Quinn R D, Chiel H J. Biologically based Dis ⁃ tributed Control and Local Reflexes Improve Rough Terrain Lo ⁃ comotion in a Hexapod Robot[J]. Robotics and Autonomous Sys ⁃ tems, 1996(18):59-64.
[15] Weidemann H J, Pfeiffer F, Eltze J. The six-legged TUM walk ⁃ ing robot. The IEEE Conference on Intelligent Robots and IROS'94.Munich,Germany[J]. 1994(2):1026- 1033.
[16] Pfeiffer F, Eltze J,Weidemann H J.Six-legged technical walking considering biological principles[J]. Robotics and Autonomous Systems, 1995. 14(2):223-232.
[17] Fielding M R, Dunlop R, Damaren C J. Hamlet: Force/position Controlled Hexapod Walker-Design and Systems[C]//The IEEE Conference on Control Applications,Mexico,2001.
[18] Brooks R A. A Robots that Walks: Emergent Behaviors from a Carefully Evolved Network[J].Neural Computation, 1989(1):253- 262.
[19] KROTKOVE, Bares J, Kanade T, et al. Whittaker. Ambler:A six- legged planetary rover[C]//Proceedings of the 5th International Conference on Advanced Robotics,Pisa, 1991.
[20] Wilcox B H,Litwin T,Biesiadecki J,et al.ATHLETE:A cargo han⁃ dling and manipulation robot for the moon[J]. Journal of Field Robotics,2007.24(5):421-434.
[21] Gorner M, Wimbock T, Baumann A, et al. The DLR-Crawler: A testbed for actively compliant hexapod walking based on the fin ⁃ gers of DLR-Hand Ⅱ [C]//Proceeding of IEEE/RSJ Internation⁃ al Conference on Intelligent Robots and Systems,2013.
[22] Irawan A, Nonami K. Optimal impedance control based on body intertia for a hydraulically driven hexapod robot walking on un ⁃ even and extremely soft terrain[J]. Journal of Field Robotics, 2011.28(5):690-713.
[23] Theeravithayangkura C,Takubo T, MaeY, et al. Stair Recognition with Laser Range Scanning by Limb Mechanism Robot "AS ⁃ TERRISK"[C]//The IEEE International Conference on Robotics and Biomimetics,Bangkok,Thailand,2009.
[24] RoennauA,KerscherT,DillmannR.Design and kinematics of a bi ⁃ ologically-inspired leg for a six-legged walking machine[C]// The IEEE International Conference on 2010 3rd IEEE RAS and EMBS,Tokyo,Japan,2010.
[25] Santos P G De, Garcia E, Cobano J A, et al. SIL 06:A six-legged robot for humanitarian de-mining tasks[C]//The International Conference on Word Automation Congress,Seville,Spain,2004.
[26] Saranli U, Buehler M, Koditschek D E. RHex: A simple and highly mobile hexapod robot[J].The International Journal of To ⁃ botics Research, 2001. 20(7): 616-631.
[27] Moore E Z, Campbell D, Grimminger F, et al. Reliable stair climbing in the simple hexapod 'RHex'[C]//Proceedings of IEEE International Conference on Tobotics and Automation . ICRA, 2002.
[28] Altendorfer R, Koditschek D E, Holmes P. Stability analysis of a clock-driven rigid SLIP model for RHex[J]. The International Journal of Robotics Research, 2004(23):1001- 1012.
[29] Voth D. Nature's guide to robot design[J]. IEEE Intelligent Sys ⁃ tems, 2002. 17(6): 4-6.
[30] Shim H, Yoo S Y, Kang H, et al. Development of arm and leg for seabed walking robot CRASTER200[J]. Ocean Engineering, 2016 (1): 55-67.
[31] Greiner H, Shectman A. Autonomous legged underwater vehi ⁃ cles for near land warfare[J]. Autonomous Underwater Vehicle Technology, 1996(6): 41-48.
[32] Gutierrez Galan D, Dominguez Morales J P, Perez Pena F, et al. NeuroPod: a real-time neuromorphic spiking CPG applied to ro ⁃ botics[J]. Neuro computing, 2019:381.
[33] 原培章,唐凯,路敦田 . 六足步行机构的探讨[J]. 长春理工大学 学报(自然科学版), 1981 (3): 77-87.
[34] Zhang H,Liu Y,Zhao J,et al.Development of a bionic hexapod ro ⁃ bot for walking on unstructured terrain[J].Journal of Bionic Engi ⁃ neering,2014. 11(2):176- 187.
[35] Pan Y,Gao F,Du H.Fault tolerance criteria and walking capabili ⁃ ty analysis of a novel parallel-parallel hexapod break walking robot[J].Robotica,2016.34(3):619-633.
[36] Mao L, Gao F, Tian Y, et al. Novel method for preventing shin- collisions in six-legged robots by utilising a robot-terrain inter⁃ ference mode[J]. Mechanism and Machine Theory, 2020. 151: 103897.
[37] 徐坤, 郑奕, 丁希仑 . 六轮腿式机器人结构设计与运动模式 分析[J]. 北京航空航天大学学报,2016.42(1):59-71.
[38] 庄红超, 高海波,邓宗全,等 . 电驱动重载六足机器人关节转速 分析方法[J]. 机械工程学报,2013.49(23):44-52.
[39] Chen Z H, Wang S K, Wang J Z, et al. Attitude stability Control for Multi-Agent Six Wheel-Legged Robot[J]. IFAC-PapersOn⁃ Line, 2020(53): 9636-9641.
[40] Barai R K, Nonami K. Optimal two-degree-of-freedom fuzzy control for locomotion control of a hydraulically actuated hexa ⁃ pod robot [J].Information Sciences, 2007. 177: 1892- 1915.
[41] 徐坤, 丁希仑, 李可佳 . 圆周对称分布六腿机器人三种典型行 走步态步长及稳定性分析[J]. 机器人, 2012. 34(2): 231-241.
[42] 张建斌, 宋荣贵, 陈伟海,等 . 基于运动灵活性的蟑螂机器人机 构参数优化[J]. 北京航空航天大学学报, 2010. 36(5): 513-518.
[43] Georgiades C,Nahon M,Buehler M. Simulation of an underwater hexapod robot[J].Ocean Engineering,2009(36): 39-47.
[44] Ozkula M C, Saranli A, Yazicioglu Y. Acoustic surface percep ⁃ tion from naturally occurring step sounds of a dexterous hexa⁃ pod robot[J]. Mechanical Systems and Signal Processing, 2013 (40): 178- 193.
[45] Barfoot T D, Earon E J P. Experiments in learning distributed control for a hexapod robot[J]. Robotics and Autonomous Sys ⁃ tems, 2006(54): 864-872.
[46] 李佳钰 . 基于触觉力反馈的六足机器人双向操控技术研究 [D]. 哈尔滨:哈尔滨理工大学, 2018.
[47] 张俊勇, 东方 . 仿生六足机器人的步态运动控制器设计[J]. 制 造业自动化,2009. 31(12): 179- 184.
[48] 徐小云,颜国正, 丁国清 . 微型六足仿生机器人及其三角步态 要救[J]. 光学精密工程, 2002. 10(4):392-396.
[49] 陈锐东 . 面向六足机器人的地形识别和运动规划研究[D]. 广 州:华南理工大学, 2019.
[50] 刘庆云,景甜甜 . 六足步行机器人及其步态规划研究进展[J]. 重庆理工大学学报(自然科学), 2015(29): 87-94.
[51] Liu C H,Su N W,Lin M H,et al.A multi-legged biomimetic stair climbing robot with human foot trajectory[C]//IEEE International Conference on Robotics and Biomimetics . Newyork: IEEE, 2016.
[52] 王霆, 管小清 . 抛物线轨迹规划在工业机器人中的应用[J]. 机 电产品开发与创新, 2012. 25(3): 18-20.
[53] KIM K Y,PARK J H.Ellipse-based leg-trajectory generation for galloping quadruped robots[J]. Journal of Mechanical Science & Technology, 2008.22(11):2099-2106.
[54] SUN G, ZHIWEI Y U, S HEN D, et al. Conglutination and de⁃ sorption trajectory planning method for gecko-inspired robot footend based on spline interpolation[J]. Modern ElectronicsTechnique, 2015.45(1): 136- 146.
[55] 李满宏, 张建华, 张明路 . 新型仿生六足机器人自由步态中足 端轨迹规划[J]. 中国机械工程, 2014. 25(6): 821-825.
[56] 王沫楠,王立权,孟庆鑫,等 . 两栖仿生机器蟹行走过程运动学 研究[J]. 哈尔滨工程大学学报, 2003. 24(2): 180- 183.
[57] 陈甫,臧希喆,赵杰,等 . 六足步行机器人仿生机制研究[J]. 机 械与电子,2009(9): 53-56.
[58] 闰尚彬,韩宝玲, 罗庆生 . 仿生六足步行机器人步态轨迹的研 究与仿真[J]. 计算机仿真, 2007.24(10): 156- 160.
[59] 丁思吉 , 刘浩宇 , 阚孟菲 ,等 . 移动机器人路径规划算法综述 [J]. 现代仪器与医疗, 2021. 27(1): 88-94.
[60] Chen Y Z, Shen S F, Chen T, et al. Path optimization study for vehicles evacuation based on Dijkstra algorithm[J]. Procedia En⁃ gineering, 2014(71): 159- 165.
[61] 潘成浩,郭敏 . 基于松弛 Dijkstra 算法的移动机器人路径规划 [J]. 计算机与现代化, 2016(11): 20-24.
[62] Wang R, Wang N. Research on vehicle path planning base on intelligent transport system[J]. Applied Mechanics and Materi ⁃ als, 2014(513/517):1822- 1825.
[63] Hart P E, Nilsson N J, Raphael B. A formal basis for the heuris ⁃ tic determination of minimum cost path[J]. IEEE Transactions on Systems and Cybernetics, 1968.4(2): 100- 107.
[64] 徐国生, 徐祖永, 周俊杰, 等 . 基于遗传算法的巡检机器人路径 规划算法的研究[J]. 机械设计与制造工程, 2021. 50(6): 93-98.
[65] 史恩秀, 陈敏敏, 李俊, 等 . 基于蚁群算法的移动机器人全局路径规划方法研究[J]. 农业机械学报, 2014. 45(6): 53-57.
[66] 倪庆剑 , 邢汉承 , 张志政 , 等 . 蚁群算法及其运用研究进展 [J]. 计算机运用与软件, 2008(8):12- 16.
[67] 国海涛, 朱庆保, 徐守江 . 基于栅格法的机器人路径规划快 速搜索随机数算法[J]. 南京师范大学学报( 工程技术版), 2007(2): 58-61.
[68] 张赫 . 具有力感知功能的六足机器人及其崎岖地形步行控 制研究[D]. 哈尔滨:哈尔滨工业大学, 2013.
[69] Ingvast J, Ridderstrm C, Wikander J. The four legged robot sys ⁃ tem WARP 1 and its capabilities[C]// Second Swedish Work⁃ shop on Autonomous Systems, 2002.
[70] Uchida H, Nonami K. Attitude Control of a Six-legged Robot in Consideration of Actuator Dynamics by Optimal Servo Control System[J]. Climbing&Walking Robots: Towards New Applica⁃ tions,2007: 299-312.
[71] Nelson G, Blankespoor K, Rmbert M. Walking BigDog: Insights and challenges from legged robotics[J]. Journal of biomechanics, 2006(39): 360.
[72] Kolter J Z, Rodgers M P, Ng A Y. A control architecture for quadruped locomotion over rough terrain[C]//2008 IEEE Inter⁃ national Conference on Robotics and Automation, Pasadena, California, USA, 2008.
[73] 李满宏 , 张明路 , 张建华 , 等 . 六足机器人关键技术综述[J]. 机械设计, 2015(10):1-8.
[74] 李一顺, 郭健, 李鑫, 等 . 仿生球形两栖机器人多机协同控制 系统设计[J]. 应用科技, 2017. 44(6): 66-71.
[75] 师五喜,王健 . 多移动机器人的协同编队控制[J]. 天津工业大 学学报,2020.39(1): 63-68.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网! 文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/51882.html