



Universal Mobile Platform with Independent Lifting Structure and Automatic Attitude Adjustment
Li Zhe,Zhang Junkun,Huang Tiangang
(Meili Technology(Guangzhou)Co.,Ltd.,Guangzhou 510663,China)
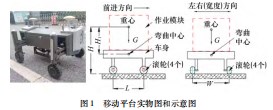
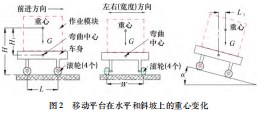
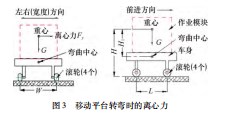
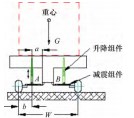
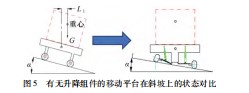
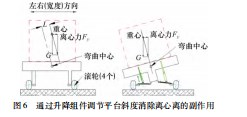
Abstract:Through the force analysis of the general mobile platform under the slope state and the near turning state,the model of the influence of the factors such as the body structure,slope,turning speed on the structural torque,grip and other product parameters was established,and a mobile platform equipped with an automatic lifting system was proposed,which composed of the body,swing arm and wheel.The swing arm was a parallelogram structure composed of two equal length brackets.One end of the swing arm was connected to the vehicle body and the other end was connected to the wheel.Structurally,the swing arm ensures that the vertical angle was maintained with the vehicle body during the whole process of wheel lifting,and ensured that the wheel was in vertical contact with the ground,with the maximum contact area and grip force.Each wheel was equipped with an independent steering mechanism.In addition to normal driving and steering,it could also realize special actions such as in-situ steering,translation and fixed-point circling.The gyroscope installed in the vehicle body could dynamically monitor the acceleration,angular acceleration,pitch angle,roll angle and other information of the vehicle body.The electric control strut was installed in the swing arm,which could dynamically adjust the wheel height control system according to the main control program through the input product structure parameters,environmental slope,steering angle and other parameters,the length of the lifting assembly was automatically controlled to adjust the state of the car body,so that the resultant force of the car body passes through the bending center,and the traction force of the roller and the ground was evenly distributed,so as to avoid the problems such as sliding,roller wear and car body rolling caused by the damage of the structural parts and the change of the traction force during the use of the product,and improve the performance of the mobile platform and the equipment.The new platform has been tested on steep slopes,sharp turns,acceleration and deceleration.During the test,the car body can maintain the required posture,the difference in grip between the rollers can be controlled within 2%,and can adapt to extreme environments such as 30°steep slopes.It improves the ability of the product to adapt to different use environments,reduces product failures,and lays a good foundation for the promotion of the universal mobile platform.
Key words:slope;sharp turns;body structure;bending center;grip









据媒体报道,三大运营商目前均已制定了2020年... 详细>>

如何设计有效的环境治理政策, 是学术界和政策... 详细>>
