



Development of LabVIEW First-order System Virtual Teaching Experiment SystemLu Yao(School of Mechanical Engineering,Nanjing University of Science and Technology,Nanjing 210094,China)Abstract:The characteristics of LabVIEW and its development status were introduced,and the LabVIEW2017 version and the control design and simulation module were used to design a virtual teaching experiment system.The virtual teaching experiment system can change the relevant parameters of the first-order system to simulate its frequency characteristics and time response time domain diagram.Different PID control systems could be designed by changing the three coefficients of PID control,and let the previous response signal pass through the PID control system to obtain the final time response time domain diagram.Finally,the designed system could reflect the relevant characteristics and time response characteristics of the first-order system.At the same time,the influence of proportional coefficient,integral coefficient and differential coefficient in PID control on the entire control system was also analyzed and discussed.The virtual teaching experiment system developed by virtual instrument technology can replace some traditional experiments,especially for some science and engineering universities,it is more important,and can alleviate the problems of traditional teaching experiment links and imbalance of experimental resources.Key words:LabVIEW;the first order system;frequency characteristic;PID control;virtual teaching experiment



 经过拉普拉斯变换之后的拉氏变换式为
经过拉普拉斯变换之后的拉氏变换式为 则上述系统的该时间响应的拉氏变换式为:
则上述系统的该时间响应的拉氏变换式为:




 ,而PID控制的传递函数
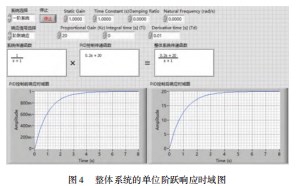
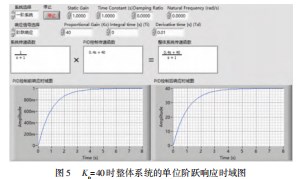
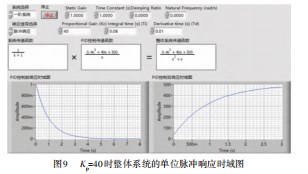
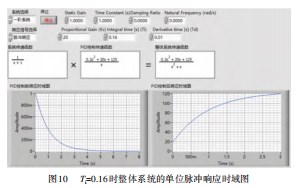
,而PID控制的传递函数 将两个传递函数相乘得出整个系统的传递函数为:。对于这样一个一阶系统,每次只改变PID控制中3个参数其中一个,再给予这整个系统一个相同的时间响应,观察最终的响应信号的时域图。
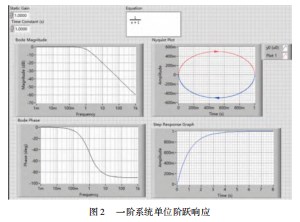
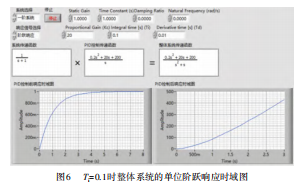
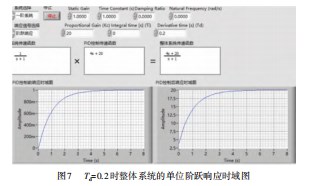
将两个传递函数相乘得出整个系统的传递函数为:。对于这样一个一阶系统,每次只改变PID控制中3个参数其中一个,再给予这整个系统一个相同的时间响应,观察最终的响应信号的时域图。 当整个系统的时间响应为单位阶跃响应,其拉普拉斯变换式为
当整个系统的时间响应为单位阶跃响应,其拉普拉斯变换式为 时,则上述系统的该时间响应的拉氏变换式为
时,则上述系统的该时间响应的拉氏变换式为 再将C(s)经过拉普拉斯反变换转化成数学表达式。得到输出的原函数为:
再将C(s)经过拉普拉斯反变换转化成数学表达式。得到输出的原函数为:
 当相同的单位阶跃响应作用在这个系统上时可以得出输出的拉氏变换式为
当相同的单位阶跃响应作用在这个系统上时可以得出输出的拉氏变换式为 再对C(s)经过拉普拉斯反变换转化成数学表达式。得到输出的原函数为
再对C(s)经过拉普拉斯反变换转化成数学表达式。得到输出的原函数为
 整体系统的传递函数为
整体系统的传递函数为 当相同的单位阶跃响应作用在这个系统上时可以得出输出的拉氏变换式为C(s)=
当相同的单位阶跃响应作用在这个系统上时可以得出输出的拉氏变换式为C(s)= ,再对C(s)经过拉普拉斯反变换转化成数学表达式。得到输出的原函数为:
,再对C(s)经过拉普拉斯反变换转化成数学表达式。得到输出的原函数为:
 当相同的单位阶跃响应作用在这个系统上时可以得出输出的拉氏变换式为
当相同的单位阶跃响应作用在这个系统上时可以得出输出的拉氏变换式为 再对C(s)经过拉普拉斯反变换转化成数学表达式。得到输出的原函数为:
再对C(s)经过拉普拉斯反变换转化成数学表达式。得到输出的原函数为:
 那么整个系统的传递函数即为F(s)=
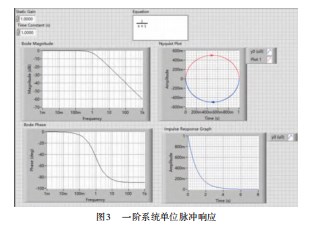
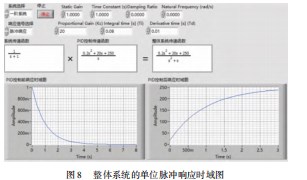
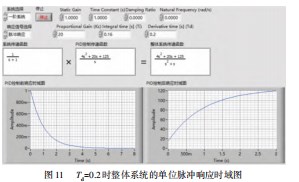
那么整个系统的传递函数即为F(s)= 当整个系统的时间响应为单位脉冲响应,其拉普拉斯变换式为R()s=1时,可以得出整个系统的输出的拉氏变换式为
当整个系统的时间响应为单位脉冲响应,其拉普拉斯变换式为R()s=1时,可以得出整个系统的输出的拉氏变换式为 再对C(s)经过拉普拉斯反变换转化成数学表达式。得到输出的原函数为:
再对C(s)经过拉普拉斯反变换转化成数学表达式。得到输出的原函数为:
 整体系统的传递函数为
整体系统的传递函数为 当相同的单位脉冲响应作用在这个系统上时可以得出输出的拉氏变换式为C()s=
当相同的单位脉冲响应作用在这个系统上时可以得出输出的拉氏变换式为C()s= 再对C(s)经过拉普拉斯反变换转化成数学表达式。得到输出的原函数为:
再对C(s)经过拉普拉斯反变换转化成数学表达式。得到输出的原函数为:
 整体系统的传递函数为
整体系统的传递函数为 当相同的单位脉冲响应作用在这个系统上时可以得出输出的拉氏变换式为c(x)=
当相同的单位脉冲响应作用在这个系统上时可以得出输出的拉氏变换式为c(x)= 再对C(s)经过拉普拉斯反变换转化成数学表达式。得到输出的原函数为:
再对C(s)经过拉普拉斯反变换转化成数学表达式。得到输出的原函数为:
 整体系统的传递函数为
整体系统的传递函数为 当相同的单位脉冲响应作用在这个系统上时可以得出输出的拉氏变换式为
当相同的单位脉冲响应作用在这个系统上时可以得出输出的拉氏变换式为 再对C(s)经过拉普拉斯反变换转化成数学表达式。得到输出的原函数为:
再对C(s)经过拉普拉斯反变换转化成数学表达式。得到输出的原函数为:

据媒体报道,三大运营商目前均已制定了2020年... 详细>>

如何设计有效的环境治理政策, 是学术界和政策... 详细>>
