SCI论文(www.lunwensci.com):
摘要 :危化品储罐的广泛应用与安全运行对底板的可靠性检测提出了更高要求 。对于储罐底板可靠性检测, 由于罐内承载介质有 毒有害, 且内部采光条件十分恶劣, 而传统的漏磁检测的检测效率 、检测定位的准确性 、路径规划等方面的研究还不能满足实际 应用的需求, 易使检测人员时常出现漏检或误判现象 。提出通过辅助定位技术提高储罐底板漏磁智能检测的定位精确度和检测覆 盖率 。通过分析定位桩的直径 、高度 、材质和放置方式等对定位性能指标的影响, 发现采用悬挂式摆放小0.05 m×H0.5 m完全不透 明材质的圆柱形 PVC管作为定位桩, 其距离和角度数据更准确, 能够使漏磁检测设备在储罐内精确定位 、检测全覆盖并自动检测, 具有路径偏移纠正功能, 提高检测效率, 降低劳动强度, 为实现漏磁智能检测提供了解决方案。
关键词 :危化品储罐底板; 漏磁检测; 定位桩
The Application Study of Assisted Positioning Technique in Magnetic Flux Leakage Testing of Hazardous Chemical Storage Tanks
Zhu Junjun1, Hu Huasheng1, Xiao Li2
( 1. Guangdong Institute of Special Inspection and Research, Foshan, Guangdong 528251, China;
2. Wuhan Institute of Technology, Wuhan 430205, China)
Abstract: The wide application and safe operation of hazardous chemicals storage tanks put forward higher requirements for the reliabilitydetection of the bottom plate. For the reliability test of the tank bottom plate, because the bearing medium in the tank is toxic and harmful, andthe internal lighting conditions are very bad, while the traditional research on the efficiency of magnetic flux leakage detection , the accuracy of detection and location, path planning and other aspects can not meet the needs of practical application, which is prone to make the detection personnel often fail to detect or misjudge. The auxiliary positioning technology was proposed to improve the positioning accuracy and detection coverage of intelligent magnetic flux leakage detection of tank floor. By analyzing the influence of the diameter, height, material and placement method of the positioning pile on the positioning performance index . It is found that hanging placement of the cylindrical PVC pipe with the mdiameter of 0.05 m × height of 0.5 m and completely opaque material is used as the positioning pile, its distance and angle data are more accurate, which can make the magnetic flux leakage detection equipment accurately locate in the storage tank , detect full coverage and automatically detect. It has the function of path offset correction, improve the detection efficiency and reduce the labor intensity . It provides a solution for realizing the intelligent detection of magnetic flux leakage .
Key words: floor plate of hazardous chemical storage tanks; magnetic flux leakage testing; gaugepile
0 引言
随着我国经济高速发展,危化品储罐得到广泛应用。危化品储罐壁板受环境因素及介质腐蚀影响,腐蚀减薄时常发生,严重时引发腐蚀穿孔、裂纹扩展甚至破裂,以致介质泄漏,影响安全生产。为使危化品储罐安全运行,降低危险事故,国家制定了相关的检测行业标准,中国石油天然气管道局发布了《立式圆筒形钢制焊接油罐操作维护修理规程》(SY/T5921-2011)和《油罐的检验、修理、改建及翻建》(SY/T6620-2014)。在这两个行业标准中,明确指出储罐壁板的检测是储罐检测的一项必需内容[1-2]。位于储罐最底层的罐底板一般由中幅板和极边板按一定的排板形式焊接而成,其上表面接触含水的存储介质,下表面与储罐的支撑物接触,是储罐最容易发生腐蚀的区域[3-7]。因此,在储罐实际检测中,底板是最关键的检测对象,也是最容易出现问题、导致事故的部件。
漏磁检测技术对底板钢板上下表面体积型缺陷(包括穿孔)具有优良的检测能力,尤其是对底板下表面点状腐蚀的检测能力突出[8-10],其结论对于做出不修、修补和更换底板的决定起着重要作用,使维修保养更具针对性,客观降低维修保养费用,广泛运用于危化品储罐底板可靠性检测。但传统的漏磁检测实际操作时劳动强度高、检测时间长,而且储罐的受限空间不允许工作人员长时间工作。近年来随着我国新建大型储罐增多,检测任务加剧,传统的手工漏磁检测方法已不适应新的环境和发展客观要求[11]。
本文开展定位装置相关研究,通过定位桩辅助定位技术使漏磁检测设备在储罐内能够精确定位和检测全覆盖,同时具有路径偏移纠正、翻越一般焊缝等障碍物功能,将漏磁技术和智能技术较好结合,自动进行漏磁检测,提高储罐底板的检测效率,降低劳动强度。
1 漏磁检测原理及智能系统构成
1.1 漏磁检测原理
漏磁检测原理是利用磁敏元件对空气中的漏磁信息进行探测。当铁磁性板材被外加磁化装置磁化后,在板材内可产生感应磁场,若板材上存在腐蚀或机械损伤等体积性缺陷,则磁力线会泄漏到板材外部,从而在其表面形成漏磁场。在磁化装置中部放置一个磁场传感器 (通常采用霍尔元件或线圈等磁场传感器),磁场传感器将底板上由缺陷产生的(漏磁场)漏磁信号转换为电信号,然后通过放大、滤波和信号处理,对于储罐底板壁厚减薄缺陷,可给出缺陷深度的当量,对于裂纹性质的缺陷,可以通过漏磁信号标准《无损检测常压金属储罐漏磁检测方法》(JB/T10765-2007)进行分析[12]。
1.2 智能系统构成
漏磁检测仪主要基于漏磁检测的原理,一般系统包含3个部分:检测部分、驱动部分和控制显示部分。本文讨论的危化品储罐底板漏磁智能检测系统,具体包括两方面功能模块研究以及整机应用:(1)选择合适的漏磁检测仪,优化结构,搭建移动驱动模块、摄像模块、通信模块、打标模块;(2)设计移动控制终端,包括系统操作平台、通讯模块、实时成像及检测数据分析模块、控制模块、智能辅助定位装置(路径规划)、数据存储模块等。整个检测过程实现自动化,存储超出阈值显示区域位置对应的图像信息。其中漏磁检测仪移动驱动模块,拟采用单车双履带结构的车体结构,内置辅助定位装置 (路径规划),能够携带检测仪在储罐表面平稳可靠地运动以及纠正路径偏移、定位、翻越一般障碍物,并完成检测任务,具有一定的稳定性和灵活性。而定位装置是实现底板漏磁智能检测的关键部分之一。本文研究的定位桩辅助定位技术使装备通过传感器感知环境信息和自身状态,实现在储罐内沿规划路径自主运动,并能够保证一定的行走精度,最终确定缺陷在储罐底板上的准确位置,对实现检测设备自动化功能具有非常重要的作用。
2 定位桩辅助定位分析
底板间焊缝的余高一般为10~20mm左右,粗细大概是10mm左右,目前未见比较合适的物理外设或者传感器可以感知、识别出储罐内的焊缝。利用高精度摄像头的图像识别技术,在储罐内光线极暗的条件下无法准确清晰地识别如此小的焊缝。利用红外技术,由于储罐底板材质一致,无法区分焊缝。利用多线激光雷达,无法保证激光扫描到焊缝区域的地面,而且焊缝尺寸较小,目前360°多线激光雷达也难以进行识别。
针对储罐内焊缝的智能识别,本文提出一种多线激光雷达配合辅助定位桩识别焊缝的独特方法,利用桩子摆放在一条焊缝两侧,通过多线激光雷达识别两个桩子的位置确定这条焊缝的所在位置,这里的桩子称为定位桩。定位桩的选取要满足识别的便利性,本文主要针对这种定位桩的选择进行相关分析。
通过激光雷达以及辅助定位桩计算确定小车(即漏磁检测仪)位置的方法主要步骤如下。
第一步:通过雷达扫描小车周边物体,根据雷达数据计算小车周边物体相对小车自身的位置信息,距离信息k1、k2、k3,以及k1、k2、k3出现位置相对小车的角度,如图1所示。
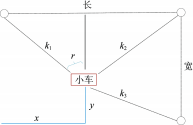
图1 小车定位示意图
Fig.1 trolley positioning diagram
第二步:将小车周边物体位置信息每3个一组进行计算,根据小车距离物体的3个距离k1、k2、k3,计算得到物体之间的长度和宽度以及垂直角度,然后与已知定位桩之间的长度和宽度进行比较,进而确定哪3个物体是已知的3个定位桩,最终确定小车周边定位柱的位置。
第三步:如图1所示,在确定3个定位桩以及3条边的位置关系后,可以结合长宽信息算出小车坐标(x,y),例如,如图1所示,x可由k1以及k1出现位置的夹角r计算得到x=sinr×k1。
第四步:小车角度校准,计算小车朝向角度与水平两个定位桩连线之间夹角,调整小车使其与水平两个定位桩连线保持平行。
2.1 定位桩的直径选取
定位桩的直径尺寸不宜过大。储罐内的障碍物一般较多,无法确保焊缝附近都能摆放一个大直径的定位桩。同时,直径过大的定位桩本身容易带来定位误差,并且也不方便携带,因此定位桩的直径选取要尽量小。
储罐内的钢板的长度一般在1~20m范围内。这里选取市面上较为主流的镭神16线激光雷达进行测试。镭神16线激光雷达以10Hz扫描频率工作时,其角度精度是0.18°。一块钢板一般要扫描的最远端是10m左右。要准确地在10m远的地方识别出辅助定位桩,需要保证至少有一个扫描点落在定位桩上,因此定位桩的直径至少要10×sin(0.18°/2)×2≈0.016m。综合考虑,本文选定的定位桩直径建议为0.05m。
2.2 定位桩的材质选取
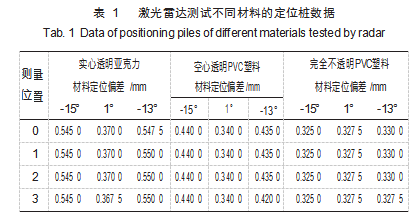
为了更快速、准确地与储罐内的其他障碍物进行区分,利用多线激光雷达对不同透明度的物体可以识别出不同反射激光强度信息的原理,本文对实心透明亚克力材质、空心透明PVC塑料材质和完全不透明PVC塑料材质等3种材质定位桩进行测试。为了保证辅助定位桩被激光雷达扫描到,定位桩到激光雷达的距离设置为0.32m,测试数据如表1所示。
从表1实验数据可以看出,随着激光光线角度增大,激光雷达到达透明材料辅助定位桩的测量数据偏差越大,而激光雷达对实心不透明材料定位桩测量数据偏差在±2mm范围以内,另外几乎不受激光光线角度变化的影响。
图2所示为完全不透明辅助定位桩的3D图显示,红色方框中为空心透明定位桩扫描图,可以看到3D图中的空心透明定位桩强度信息是橘红色,而且多线雷达所得的多根线条都在同一竖直平面内,相对更平整。这说明,通过激光雷达的内部数据校正,其不同角度的光线所得的测试距离数据是一致的。对于透明材料的定位桩,其点云图的线条是比较扭曲的。造成这种扭曲的原因,是由于激光光线的在透明定位桩表面折射等原因造成的,其结果就是所得的距离等信息不准确。
分析上述的实验数据可知,针对透明材质定位桩,虽然通过多线激光雷达的强度信息确实能准确分辨定位桩和储罐内其他物体,但是透明物体会对光线进行折射,导致最后雷达测量的距离不准确,无法准确确定焊缝位置。相比之下,采用完全不透明材质的定位桩,其所得的距离数据和角度数据都比较准确,因此确定采用完全不透明定位桩。
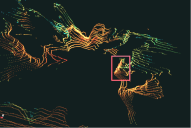
图2 完全不透明定位桩雷达3D图
Fig.2 Radar 3D diagram of completely opaque positioning pile
2.3 定位桩高度确定
由于采用的是非透明材质,为了区别现场的浮顶柱和定位桩,可以通过多线雷达计算定位桩的高度,利用高度的区别识别现场的浮顶柱和定位桩。为了更方便区分,需要为定位桩设计合适的高度。雷达光线散射的效果如图3所示,雷达散射的光线条数为16条,向上向下各8条,每两条之间相差2°,光线角度最大是15°。
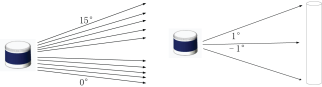
图 3 雷达光线散射 图4 雷达两根光线
Fig.3 Radar light scattering diagram Fig.4 Schematic diagram of two light scanning positioning piles of radar
雷达识别出定位桩需要确保几点:(1)至少要有两根光线打到定位桩上,确定定位桩是一个竖直的圆柱体;(2)要确保20m左右雷达至少有两个点扫描到定位桩上,如图4所示。因此,定位桩的高度至少10×tan(1)×2≈0.0349m。为使用方便,本文确定的定位桩高度为0.5m。
2.4 定位桩形状的选取
雷达光线只能探射到定位桩表面,为了雷达从各个方向扫描到定位桩,确保定位桩的中心到雷达的距离都是可以通过计算得到,圆形定位桩的形状可以满足要求。即实际雷达到定位桩中心的距离L等于雷达光线测量的定位桩表面最短距离L1加上定位桩半径R。同时雷达在储罐内配合智能设备运动的过程中,雷达的垂直高度无法一直保持固定,因此定位桩从下到上的圆形半径要保持一致。
综上所述,定位桩的形状只能是圆柱体形,而不能是圆锥体形,更不能是长方体形。
2.5 定位桩的摆放改进方案
为了更好地配合雷达确定焊缝的所在位置,定位桩的摆放必须要垂直于地面,而储罐底板上会存在很多因素影响到定位桩的摆放,例如焊缝焊接的不平整、底板上有很大焊瘤、底板凹凸不平等。针对这个问题,对上述定位桩的结构进行改进,设计了一种可以移动的悬挂式定位桩结构,如图5所示。这种定位桩可以改变接触地面的位置,但是保持定位桩的实际位置保持不变,而且定位桩始终垂直于地面。
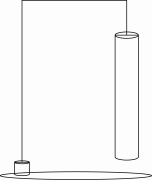
图5 辅助定位桩改进装置结构
Fig.5 Structural diagram of the improvement device for positioning pile
本文研究了用于漏磁智能检测导航的多线激光雷达辅助定位技术,给出了定位桩的直径、材质、高度以及其放置方式等选取范围,使测量的距离和角度数据更准确。在惠州某炼油厂10000m3储罐进行整体功能测试,漏磁检测仪通过传感器感知环境信息和自身状态,实现在储罐内沿规划路径自主运动及开展检测,能够平稳可靠地运动,扫描速率为0~10m/min,移动精度为运动1m的偏移量不超过10mm。对8mm厚度试板检出直径1.6mm通孔和直径10mm深1.6mm孔,检出率95%以上,能够在储罐底板上对缺陷进行准确定位,达到精准的漏磁检测的目的,同时可以提高检测工作效率、降低检测成本、改善作业条件。
参考文献:
[1]SY/T5921-2011,立式圆筒形钢制焊接油罐操作维护修理规程[S].
[2]SY/T6620-2014,油罐的检验、修理、改建及翻建[S].
[3]刘志平.基于有限元分析的储罐底板磁性检测与评价方法研究[D].武汉:华中科技大学,2003.
[4]胡志海,丁克勤,魏化中,等.基于储罐底板腐蚀声发射监测技术的信号能量分析[J].机电工程技术,2020,49(1):105-107.
[5]ShuaiJ,HanKJ,XuXR.Risk-based inspection for large-scale crude oil tanks[J].Loss Prev.Proc.Ind.,2012(25):166.
[6]阎永贵,吴建华,陈光章.原油储罐内底板的腐蚀防护现状与展望[J].腐蚀与防护,2002(5):199-201.
[7]毕海胜,王鸿雁,王海霞,等.基于声发射和电化学的储罐底板钢均匀腐蚀特征[J].腐蚀科学与防护技术,2017,29(4):381-386.
[8]胡永,韩敬翠,沈建民,等.某2万m3润滑油储罐底板腐蚀检测及原因分析与预防[J].石油工程建设,2017,43(5):61-64.
[9]郭晋,唐经源,李博,等.一种自动化磁粉检测系统的研制[J].机电工程技术,2021,50(4):63-67.
[10]肖维鹏.无损检测方法在压力容器检验中的综合应用[J].石油和化工设备,2011(14):60-62.
[11]付宜利,李志海.爬壁机器人的研究进展[J].机械设计,2008,25(4):1-5.
[12]季华建,王波,祝加轩,等.5000m3原油储罐底板的漏磁检测[J].石油化工腐蚀与防护,2018,35(5):32-34.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/46560.html