SCI论文(www.lunwensci.com)
摘 要 :雷达,尤其是二次雷达,在我国军用设备中起着重要作用。近年来,二次雷达系统经历迅速发展阶段并发挥着诸 多优势, 然而也存在一些问题。本文介绍了二次雷达工作原理, 对二次雷达系统仿真进行了全面详细的设计, 经过仿真实验, 得出仿真结果并对结果进行分析,以期为二次雷达的实际应用提供建议和借鉴。
Analysis of Simulation Technology for Secondary Radar System Based on STAGE
ZUO Mingrui
(Air Traffic Administration of Civil Aviation of China in East China Jiangxi Branch, Nanchang Jiangxi 330000)
【Abstract】:Radar, especially secondary radar plays an important role in China's military equipment. In recent years, secondary radar systems have experienced rapid development and played many advantages, however, there are also some problems to some extent. This article introduces the working principle of secondary radar, and conducts an overall and detailed design of secondary radar system simulation, after simulation experiments, obtain simulation results and analyze the results, to provide suggestions and references for the practical application of secondary radar.
【Key words】:STAGE;secondary radar system;simulation technology
0 引言
正确判识敌我属性一直是雷达系统的关键要素,提 高雷达系统的正确识别概率有助于提高我军整体作战 能力,具有重要现实意义。本文深入分析二次雷达系 统的构成和工作原理,建立仿真模型并设计出一个基于 STAGE 的二次雷达敌我判识的仿真系统,结合系统的 重要参数寻找一种可降低干扰对雷达系统正确识别概率 的解决方法。
1 二次雷达系统仿真介绍
1.1 二次雷达
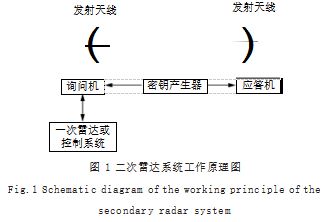
一次雷达能够发现目标并对目标定位,依靠接受目 标物返回的电磁波来工作,而二次雷达在一次雷达的基 础上增加了询问应答机制。二次雷达的组成部分有应答 机、询问机、天线等,应答机与询问机可根据实际需要 进行分开配置或一起配置,系统通过应答机与询问机的 映射关系来互通消息 [1]。二次雷达系统工作建立在一次 雷达或控制系统的基础上,核心的工作原理是(如图 1所示) :当一次雷达发现目标时,询问机向应答机发送加密的询问信号,应答机解码信号并向询问机发送应答信号。由此可见,二次雷达系统的核心组成部分是应答机与询问机。询问机用于向目标发送询问信号和接受来自目标的应答信号,从而处理判断信息,组成部分有接收机和发射机,其中发射机用来生成并向外发送信号 ;接收机用来接受并分析判识目标返回的信号。应答机用于 应答响应,在应答信号中提供自身的编号、高度等信息。
1.2 影响二次雷达系统的几种主要干扰
目前的二次雷达系统使用“全呼叫”方式进行工 作,这就导致雷达系统内部存在多种干扰,常见的干扰 有应答占据、旁瓣询问、混扰及窜扰等。应答占据和旁 瓣询问是应答机接收信号时产生错误的主要原因 ;混扰 及窜扰是询问机发送信号时产生错误的主要原因。应答 占据指的是应答机在接收、处理某一询问信号到响应应 答信号之前的一段时间不能同时响应其他询问机发来的 信号 ;旁瓣干扰可能发生在询问机和应答机距离很近的 情况下,由于应答机不仅接收主波束询问还接收旁瓣询 问,当询问机旁瓣辐射的信号达到能触发应答机的最小 触发电平时,应答机也会产生应答 ;混扰发生在询问信 号波范围内存在多个(两个以上)我方目标,此时询问 机会收到多个应答脉冲,这些应答脉冲之间重叠、交 错,甚至影响了正确译码 [2] ;窜扰可能出现在多部询问 机先后向多台应答机发送询问信号时,由于应答机会对 每一个询问信号作出回应,因此每个询问机会收到多个 应答脉冲,这些应答脉冲之间就形成了干扰,也称异步 干扰。
1.3 二次雷达系统的几个重要参数
二次雷达系统有探测范围、天线高度、波门精度、 路径衰减、信号长度等重要参数,询问机所能探测的范 围受视距影响,其两个主要影响因素是目标的高度和询 问天线的高度 ;系统由于存在窜扰,为了尽可能降低窜 扰的影响使接收机仅在应答信号返回过程开始工作,这 需要根据一次雷达提供的信号长度及距离等信息来计算 出接收机的打开时间和关闭时间,同时为了提高接收信 号的准确性,在经计算得出的打开时间点前提前了一定 的时间,在关闭时间点后延长了一些时间,这段时间就 是波门精度 ;二次雷达不同于一次雷达,具有单向路径 衰减的特性 ;信号长度与应答占据有关联,长度较长则 增加系统占据时间从而降低系统的识别效率。
2 仿真模型建立
系统仿真实验使用 STAGE 软件完成,利用 GENMAP 依照实际地形数据来生成相对应的地图,将实际中因距 离出现的路径衰减转换为平台的探测概率和探测距离, 询问机和应答机正常工作时的概率是 1[3]。其中天线模 型主要有初始角度、扫描速度、扇扫范围、威力范围、 俯仰角和水平角宽度等参数,系统的视距范围是通过天 线和目标高度计算出来的 R,发现的条件是应答机总是 在询问天线的发射功率作用范围与波束范围内。
3 系统仿真总体设计
3.1 STAGE 的体系结构
STAGE 仿真软件包含数据库编辑器(DE)、仿真 引擎(SIM)及开发工具包(DK)等核心部件。数据 编辑器具有构造想定、描述特征、启动仿真与显示想定 数据等功能,在系统设计阶段可以利用数据编辑器来建 立相应实体对象或调用数据库中已有的实体模型,如武 器、海洋、大气层、声纳等 ;仿真引擎有一个仿真机和 多种仿真模型,包含实时控制器、实体管理器、模型管 理器及想定管理器等核心部件 ;开发工具包的主要组成 部分是程序员工具包和一个开发接口(DI),同时具有 自行拓展 STAGE 的能力。
3.2 系统仿真设计流程
根据二次雷达系统具体仿真需求,使用仿真学方法 设计出系统仿真的总体流程。
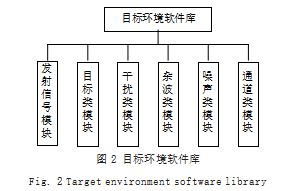
首先,了解二次雷达系统的工作原理及主要构成和 STAGE 仿真软件的核心部件及仿真机制,根据实际需 要来拓展 STAGE 的功能 ;其次,从 STAGE 环境软件 库中,选择实体模型来建立二次雷达系统的仿真原型, 在 DE 中实例化以后,选用合适的算法并经过少量编程 完成仿真动作 ;最后,选用一些常用的布站方式进行仿 真实验,在实验结束后分析仿真结果并总结出影响二次 雷达系统识别概率的因素,进而为二次雷达系统实际使 用时提出合理建议或改进措施 [4]。其中 STAGE 软件中 目标环境软件库组成如图 2 所示。
4 系统仿真详细设计
4.1 STAGE 应用开发接口
STAGE 仿真软件中有一个核心的概念即实体,单一 武器是一个实体、独立作战的兵力单元是一个实体, 一 个武器系统也是一个实体 [5]。该仿真软件用于构造想定 作战环境,支持扩展 STAGE 功能以满足不同用户的仿真 需求,因此,在建立仿真模型之前,先要扩展 STAGE 的 DI、SIM、脚本语言以及通信等方面的功能。在 DI 方面的扩展,用户可根据实际需要自定义数据结构,本仿真在实体属性配置增加了 sensor_look_on 选项, 这 一选项用来设置传感器模式是对海询问还是对空询问, 直接在 scn_ptf 中增加相应字段即可,同时设置 none、 air、sea 三种选择类型并进行相应编号和可见性设置 ; 在 SIM 方面的扩展,可通过嵌入用户函数和用户模块 等方式来扩展 SIM 功能, SIM 作为调度管理器主要用 来制定仿真执行过程中的频率 ;在脚本语言方面的扩 展, STAGE 自身提供了一些脚本语言,用户还可以自 行根据仿真要求在扩展接口程序中通过增加新的对象、 函数或常数等来丰富动作使其满足各种实际仿真要求 ; 在通信方面的扩展, DI 可利用以太网或共享内存等方 式来完成内外部进程间的通信,同时也可使用第三方软 件来实现分布式仿真。
4.2 建立实体基本原型
建立实体原型分为建立传感器原型和建立平台原 型,传感器原型构建时,本仿真的主要目标是探究传感 器的整体探测能力,不深入模拟细节,探测能力使用 “距离和探测概率”进行度量。由于本系统区分海空属 性,具体仿真实验中要建立两个传感器模型,分别是对 海传感器模型和对空传感器模型,同时为这两个传感器 原型设置探测概率和探测距离,并且探测距离和概率是 反比关系,如为对空传感器原型设置 500km 的探测距 离,根据仿真时的实际条件可计算得出不同实体的距离 和探测概率 [6]。
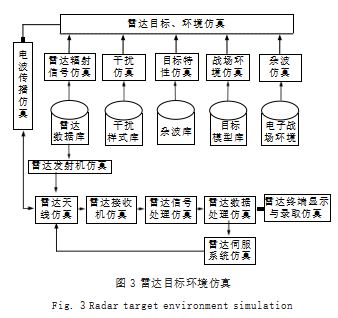
在平 台原型构建 中, STAGE 提供潜艇、直升机、 固定翼飞机、陆地战及水面舰艇等多种平台类型(雷达 目标、环境仿真如图 3 所示),不同类型的平台具有不 同的电子对抗、动力学数据、武器类型、导航控制、外形数据、传感器类型及目标反射截面积等。二次雷达 系统有舰船(海上实体)、地面站雷达及雷达机载平台 (空中实体)三种平台原型。对地面站平台的设计,与 舰船的设计步骤相似,考虑到地面站不动,因此将其 加速度和速度均设置为 0.传感器类型设置为对空传 感器原型 ;对雷达机载原型的设计,本仿真选择固定 翼飞机,平台尺寸依照实际大小来设置,限制加速度 (0 ~ ±20m/s2)和速度(0 ~ 300m/s),传感器类型 设置为对空雷达传感器原型。
4.3 询问机的工作流程及脚本实现
常见的系统平台有应答机、询问机、询问应答机三 类,在对平台动作脚本进行数据分配之前,先要添加对 应程序来设置多应答机和多询问机在大数组区域共享时 的分配方式 [7]。添加完成后,下一步就是询问机和应答 机脚本实现。询问机工作流程包含发射机和接收机两部 分,询问机一次识别目标的具体脚本实现步骤 :(1)根 据一次雷达提供的信息来判断是否有新目标,如果存在 新目标,存储目标的发现时间及方位信息 ;(2)将询问 时间同步给相应的应答机 ;(3)判断已经接收的应答信 号和波门范围的关系,只要有一个信号处于波门范围内 就算成功收到应答信号,如果存在两个及以上的重叠的 应答信号,则发生了窜扰现象 ;(4)依照不同的生活方 式来判断应答或询问次数是否大于一次识别需要的应答 或询问的次数,只要有一项超过就算已经完成目标的一 次识别过程,此时可以停止该目标的识别询问。
4.4 应答机的工作流程及脚本实现
相较于询问机,应答机的工作流程相对简单, 仅需 要接受询问并发送相应应答信号即可,具体脚本实现步 骤 :(1)先获取询问机数量,再判断是否有询问机发现 了该应答机,若有则读取该询问机编号 ;(2)如果该应 答机被询问机识别并已经接收到询问信号,应答机对密 码进行判断,密码匹配的情况下开始应答 ;(3)应答机 处理占据。
4.5 询问应答机的工作流程及脚本实现
询问应答机同时具有询问机和应答机的功能,在发 现新目标时发挥询问机的功能,在接收到询问信号后发 挥应答机的功能,通过占据模式来区分该机器处于哪种 工作状态,有询问占据和应答占据两种,在发挥某种功 能时设置为相应的占据模式 [8]。具体的动作脚本实现步 骤 :(1)判断是否有询问占据 ;(2)判断是否有应答 占据 ;(3)若没有占据,如果发现新目标设置为询问 占据,接收应答信号设置为应答占据,直到所有动作完 成,设置为空闲。
5 系统仿真结果及结果分析
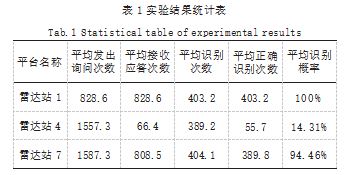
所有准备工作完成后, 选取 5 种经典的仿真并对仿 真结果进行分析,判断其中某一次的实验条件及结果。 实验条件 :询问机使用四判二工作方式,询问信号长度 是 72 微秒,应答信号长度为 4 微秒,波门精度为 2 微 秒,应答延迟 201 微秒,雷达站 1、4、7 处于工作状态 且转速均为 36 转 / 秒。经过 10 次仿真,各雷达站仿真 结果统计如表 1 所示。
雷达站 1、4、7 具有相同配置,然而雷达 4 的平 均识别概率很低的主要原因是近距离对雷达 4 造成了严 重干扰,经仿真实验发现,影响平均识别概率的除了距 离因素,还有询问机的转速与启动时间、询问机工作方 式、询问应答机的编队距离等因素。
综上所述,询问机工作方式、转速及启动时间和平台之间的距离等因素都会对二次雷达系统的正确判识概 率造成影响,这就要求实际中要注意对这些关键参数的 调整,为二次雷达系统设置恰当的参数值有利于提高系 统的正确识别概率,未来还需要进行更多的实验来观察 分析更多系统参数对系统正确识别概率的影响。
参考文献
[1] 朱永杰,崔向阳,雷张华.空管A/C模式二次雷达仿真软件设 计[J].科技创新与应用,2023.13(1):47-50.
[2] 郝敬堂,苏志刚,韩冰.S模式二次雷达数据链仿真实验平台 开发[J].实验室科学,2021.24(5):211-214.
[3] 龚凯峰.二次雷达集群目标应答方法研究[D].西安:西安电子 科技大学,2021.
[4] 漆静晨.二次雷达信号高精度测向方法研究[D].成都:电子科 技大学,2021.
[5] 王玉柱,滕新友,牟光红,等.一种带有前级功控的二次雷达发 射机设计[J].现代信息科技,2023.7(1):44-47.
[6] 许家民,何永红.移动式二次雷达结构设计关键技术研究[J]. 电子机械工程,2021.37(3):9-12+27.
[7] 曾湘洪,苟玉玲,唐博.基于相位特征的二次雷达解交织技术 研究[J].舰船电子对抗,2021.44(3):63-67.
[8] 朱栋,冯成涛,储开斌,等.ADS-B信号交织概率仿真与分析 [J].计算机仿真,2021.38(3):30-33+45.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/67678.html