SCI论文(www.lunwensci.com)
摘 要: 目的 :针对脑室外引流术后护理主要依靠医护人员目测计量,存在劳动强度大、计量精度低、难以控制流速等不 足,设计一套基于双目视觉的脑室外引流监控系统。方法 :通过测量点滴个数和相邻点滴的间隔时间计算引流速度和引流量。 采用双目视觉和头部关键点识别技术实现对头部关键点的定位。提出一种计算头部关键点高度的算法,只需角度传感器实现对 头部关键点的运动跟踪。调整引流瓶高度至安全范围,使用粗精结合的调节方法,调节引流速度。实验 :该系统实现引流速度 的监测,侧脑室平面的定位和引流速度的调节,实验结果满足使用要求。结论 :本系统操作简单,可自动调整引流瓶高度以控 制引流速度,能减轻医护人员的工作负担,使引流过程更加安全可靠。
Design of a Binocular Vision Based Ventricular Drainage Monitoring System
ZHANG Kexi, CAI Jinda
(University of Shanghai for Science and Technology, School of Publishing, Printing and Art Design, Shanghai 200093)
【Abstract】:Objective: Aiming at the shortcomings of high labor intensity,low measurement accuracy,and difficulty in controlling flow velocity after ventricular drainage surgery,a set of external ventricular drainage monitoring system based on binocular vision was designed. Methods: The drainage speed and drainage flow were calculated by measuring the number of drips and the interval time of adjacent drips. Binocular vision and head key point recognition technology are used to realize the positioning of head key points. This paper proposes an algorithm for calculating the height of the head key point, and only the angle sensor is required to realize the motion tracking of the head key point. Adjust the height of the drainage bottle to a safe range, and adjust the drainage speed using a combination of rough and precise adjustment methods. Experiment: The system realizes the monitoring of drainage velocity, the positioning of lateral ventricular plane and the adjustment of drainage speed,and the experimental results meet the requirements of use. Conclusion: The system is simple to operate, and can automatically adjust the height of the drainage bottle to control the drainage speed, which can reduce the work burden of medical staff and make the drainage process safer and more reliable.
【Key words】:ventricular drainage;binocular vision;monitoring system;flow rate regulation
脑脊液引流是神经外科常用的治疗手段之一,可分 为脑室外引流和腰大池引流两类,通过清除脑内积血、 减少脑积水、快速降低颅内高压,在脑膜刺激征和脑血 管痉挛的治疗中效果很好 [1]。脑室外引流管是一种全封 闭的引流管,在使用过程中常应保持高度恒定。临床上 普遍使用输液架或自制的简易标杆作为引流固定装置, 通过改变悬挂高度来调节引流速度。脑科危重患者行脑室外引流术也会采用摇高床头的方式来降低患者的颅内 压,通过把床头角度调整为约 30°,把引流瓶高度调整 为高于外耳道平面 10cm ~ 15cm, 以约 10ml/h 的速 度引流,使患者的颅内压保持相对稳定 [2]。随着科学技 术的不断发展,双目视觉技术已经广泛应用于距离测量 和目标定位,测量角度或流量的传感器也广泛应用于社 会生产生活。针对现有的脑脊液引流术后护理存在劳动强度大,计量精度不高,难以控制流速等不足,设计一套基于双目视觉的脑室外引流监控系统,可实现脑脊液引流过程的监测与控制,能减轻医护人员的工作负担,使引流过程更加安全可靠。
1 系统总体设计
本系统结构上分为引流固定装置和引流器两部分,功能上包括自动监控和手动调节两种模式。系统总体要求包括自动定位人体头部关键点,根据人机交互系统设定的相关参数自动调整引流瓶至设定的相对高度,在安全的相对高度范围内,调整引流速度,控制引流量。当需要升降床头高度时,控制引流瓶相对高度在安全范围内,使引流速度保持相对稳定。同时在人机界面显示引流状态相关参数,出现异常情况时,终止引流过程,发出警报信号。
2 引流固定装置结构设计
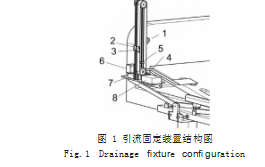
本系统引流固定装置结构如图 1 所示。其中 :1 为固定安装在竖直杆上的双目摄像头 ;2 和 3 为安装在引流瓶固定处用于测量引流速度的直射式红外光电传感器 ;4 为用于测量床头升降角度的角度传感器 ;5 为用于设定步进电机原点的光电开关传感器 ;6 为步进电;7 为用于步进电机的驱动器 ;8 为由触摸屏和树莓派及蜂鸣器组成的控制器。当医护人员完成相关参数设定,启动自动监控过程后,系统将启动双目摄像头,获取当前图像,通过识别头部关键点,利用双目视觉技术获取关键点的三维信息,计算得出引流瓶高度需要调节的量。控制器发出控制信号,通过驱动器驱动步进电机完成相关操作。当引流瓶高度调整完成后,系统将打开引流器上的引流阀,开始引流。当检测到第一滴液滴流出,系统将启动流速调节功能,通过微调引流瓶的高度,调整引流速度。当引流过程中,床头角度发生变化时,系统将调整引流瓶高度至安全范围后启动流速调节功能,调整引流速度。当出现调节失效等异常情况时,系统发出报警信息,引流正常完成后,系统关闭引流阀,结束引流。
2.1 引流器结构设计
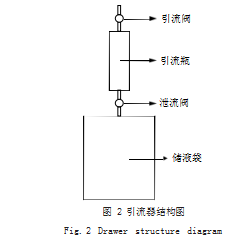
引流器由引流管、引流瓶、引流阀、泄流阀和储液 袋组成,如图 2 所示。引流瓶用于暂存引流出的脑脊 液,引流阀用于控制引流过程的通断,泄流阀用于控制 引流瓶中脑脊液导出到储液袋过程的通断。引流阀为常 闭型二通阀,当系统根据设定参数将引流瓶调整到相对 高度后,打开引流阀,开始引流 ;当出现异常或引流完 成,则关闭引流阀。泄流阀也是常闭型二通阀,当引流 瓶中引流量达到设定值,打开泄流阀。
2.2 监控系统设计
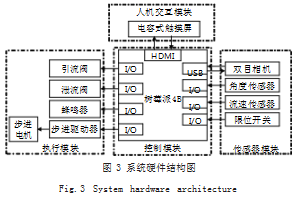
本系统分为 4 个模块 :控制模块、传感器模块、人 机交互模块和执行模块。主要由树莓派 4B、4 寸电容式 触摸屏、USB 双目摄像头模组、角度传感器、itr1150 槽型光电开关传感器、HU-B15N 槽型光电开关传感器, 引流阀、泄流阀、步进电机、蜂鸣器组成。系统硬件结 构图如图 3 所示。
3 监控方法和原理
本系统采用基于立体视觉和深度学习的定位方法, 获取病人头部关键点的空间三维信息,设计头部关键点 高度计算算法,确定任意床头角度时的侧脑室平面高度,通过测量液滴个数和相邻液滴间隔的时间计算引流 速度和引流量,通过调整引流瓶高度调节引流速度。
3.1 目标位置三维定位
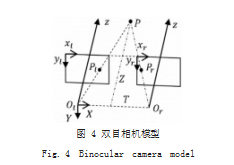
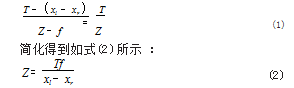
本系统采用平行光轴双目立体视觉模型,如图 4 所 示 [3]。假设组成双目视觉的两部相机具有相同的焦距f, 两部相机拍摄得到的图像位于同一个平面且 x 轴共线, 同时两部相机的相机坐标系的 z 轴互相平行, T 表示两 个相机坐标系中坐标原点间的距离。空间中 P 点能够同 时被两个相机捕获,在两张图像中,对应点的坐标分别 是pl 和pr ,根据相似三角形原理, P 点在左侧相机的相机坐标系中的深度 Z 满足如式(1)所示的条件 :
得到 P 点 Z 轴的坐标后,就可以得到 P 的坐标表 达式如式(3)所示 :
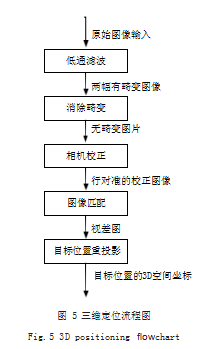
利用双目视觉技术获取目标点的空间三维信息如 图 5 所示。完成相机标定获得相机内参矩阵和相机畸变 系数矩阵后,对采集到的图像进行低通滤波和去畸变, 得到校正畸变后的图像 [4]。通过立体校正使左右图像实 现行对准,再通过立体匹配实现左右图像中对应点的匹 配,得到视差图,通过计算转为深度图,进而得到病人 头部关键点的三维信息。
3.2 头部关键点检测
采用基于卷积神经网络的轻量级 OpenPose 实现对病 人头部关键点的识别。轻量级 OpenPose(Lightweight OpenPose)是对开源项目 OpenPose 框架进行的改进。 OpenPose 是一个可以基于实时多人关键点识别读懂人类肢体语言的开放库和程序包,可通过一张图像获得准 确率较高的人体关键点坐标 [5]。当病人处于正卧位时, 临床上选择病人的外耳道口平面作为定位引流瓶悬挂高 度的基准点,此时可选择病人的耳朵关键点作为图像定 位点 ;当病人处于侧卧位时,临床上选择病人正中矢状 面作为定位基准点,此时可选择病人鼻子关键点作为图 像定位点。通过 OpenPose 得到图像中一组人体关键 点的二维坐标后,读取耳朵关键点和鼻子关键点的二维 坐标,计算获得耳朵关键点和鼻子关键点的三维信息, 通过比较这些关键点的深度信息,选择深度最小的关键 点作为最终的定位点。当鼻子关键点深度最小时,病人 为侧卧位,当耳朵关键点深度最小时,病人为正卧位。
3.3 头部关键点运动分析
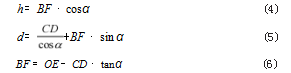
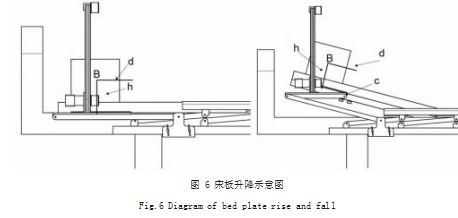
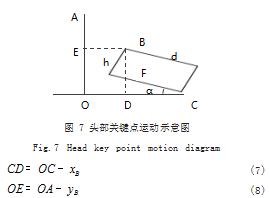
如图 6 所示,以 B 点表示病人头部关键点,以 C 点表示脑室外引流固定装置水平横杆右端点, C 点在床 头板升降过程中,与床头板保持相对静止。记 B 点到 C 点沿与床头板平行方向的距离为 d,沿与床头板垂直方 向的距离为 h,以 A 点表示双目相机在竖直杆上的固定 点,以 O 点表示竖直杆在水平杆上的固定点,当床头 板的升降角度为 α 时,如图 7 所示。
利用双目视觉可获得 B 点在相机坐标系下的三维坐 标,记为(XB,YB,ZB),则可得到如式(7)、式(8)所示 :
3.4 速度调节
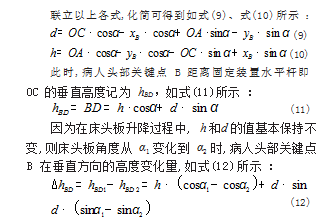
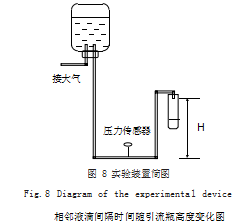
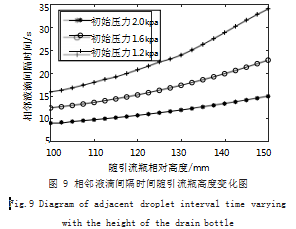
脑脊液引流中,引流速度受到引流瓶悬挂的相对高 度,病人脑脊液的理化特性,病人颅内压的大小等多种 因素的影响,其中,引流瓶的悬挂高度,对引流速度有 显著影响。搭建如图 8 示意图所示的实验装置,设定引 流瓶初始高度为 10cm,调整左侧输液瓶高度,使引流 瓶在初始位置时的管道内压力分别为 2.0kpa、1.6kpa、 1.2kpa,测量此时相邻液滴的间隔时间。等距离调整引 流瓶高度,测量对应高度相邻液滴的间隔时间,结果如 图 9 所示。由图 9 可知,引流瓶高度的改变与点滴速度基本成线性关系,而引流瓶的高度可通过电机实现精确 的定量控制。
当医护人员通过人机交互系统设定引流量为 L,引 流时间为 T,滴系数为 n 后,系统将利用如式(13)、 式(14)所示的公式自动计算出期望引流速度 v 和期望 相邻液滴间隔时间 T2.
式中, L 的单位为毫升, T 的单位为小时, n 的单 位为滴每毫升, v 的单位为毫升每分钟, T2 的单位为秒。 当使用传感器测得实际相邻液滴间隔时间 T3.实际引流 速度如式(15)所示 :
当启动流速调节功能后,系统以粗调步长在安全 范围内沿趋近期望流速的方向前进,当 |T2-T3 | ≤ 2 或 T2-T3 的值发生符号变化,则改用精调步长逼近期望流 速,当 |T2-T3 | ≤ 0.5.则完成引流速度调节。
4 软件与界面设计
4.1 软件设计
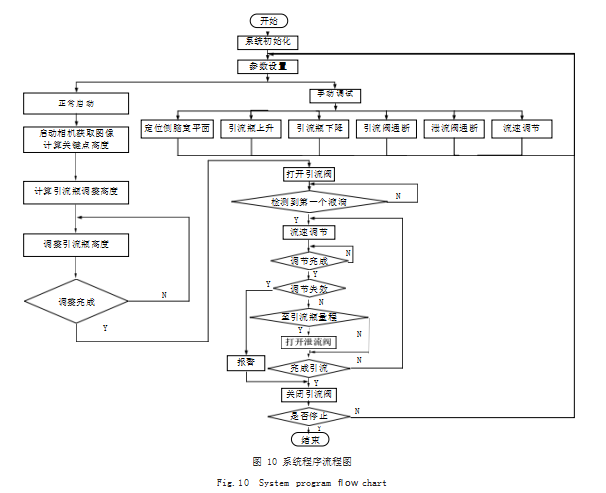
控制系统上电后进行初始化,然后进入参数设置界 面,在检测完故障异常后,进入正常启动和手动调试的 选择 [6],在手动调试状态下,可以完成侧脑室平面高度 的定位,引流瓶的升降,引流阀和泄流阀的开闭,流速调节功能的启停等一系列动作。正常启动后,启动双目 相机,获取图像,处理图像得到头部关键点的空间三维 信息,完成侧脑室平面高度的定位。计算出当前引流瓶 高度与设定值的差值,调整引流瓶至安全高度。调整完 成后,打开引流阀,开始引流,当检测到第一滴液滴落 下,启动流速调节功能,当引流量达到引流瓶设定量程 时,打开泄流阀,将引流液从引流瓶中排入引流袋。当 引流结束,关闭引流阀,结束引流过程。引流中出现调 节失效的异常情况,则关闭引流阀,结束引流过程,同 时发出报警信息。系统程序流程图如图 10 所示。
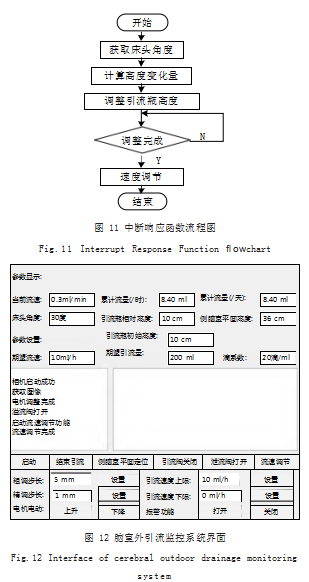
当床头角度发生变化时,启动床头升降中断服务程序, 获取床头角度,计算引流瓶的调节高度,调整引流瓶高 度,启动速度调节。床头升降中断服务程序如图 11 所示。 4.2 界面设计
数据的实时显示包括瞬时流量(引流速度)、每小 时累计引流量、当次累计引流量、当天累计引流量、当 次引流时间设定及显示、当次引流量设定及显示、当天 引流量设定及显示、引流阀和泄流阀的关闭打开及状态显示、报警功能的打开或关闭等。界面如图 12 所示。
5 实验结果与分析
5.1 流速测量
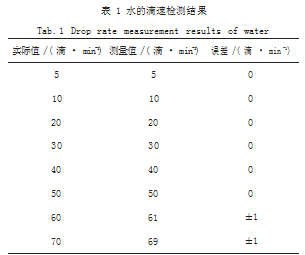
本实验选用水作为实验样本,通过传感器测量每分 钟的水滴数量,并与人工测量得到的实际的计数值比 较,实验获得的部分结果如表 1 所示。由表 1 可知,当 水滴的滴速为 0 ~ 50 滴 /min 时,测量非常准确,测 量值与实际值相等 ;当水滴的滴速高于 50 滴 /min 时, 如本实验在 50 ~ 70 滴 /min 时,测量比较准确,测量 值与实际值存在 ±1 滴 /min 的误差。临床的实际引流 中,脑积液的引流速度不得高于 3 滴 /min[7],每天累计 引流的量不得高于500ml。3滴 /min 的引流速度所属 的速度范围在本实验中测量误差为 0.脑积液的遮光性 也远高于水,所以实验结果满足使用要求。
5.2 侧脑室平面定位
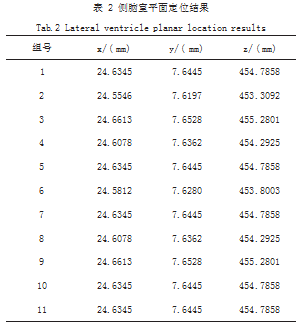
侧脑室平面定位结果如图 13 所示,图 13 中各部分 分别为右相机原图像,左相机原图像,头部关键点检测图、视差图、深度图,连续多次实时测量结果。以右相 机坐标系为世界坐标系,因此深度图和关键点检测图也 以右相机图像为基准 [7]。
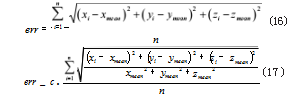
图 13 中 11 组定位结果如表 2 所示。因相机的坐标 中心难以准确定位,且对空间中点的实际三维坐标的测 量不可避免的出现误差,以 11 组结果的平均值作为准 确结果, 定义平均绝对误差 err 和平均相对误差 err_c 如式(16)
和式(17)所示:
代入数据,计算得平均绝对误差 err=0.4651mm, 平均相对误差 err_c=0.1%,实验定位精度高,定位结 果稳定,可以满足应用需要。
5.3 流速调节
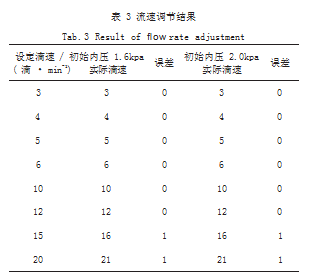
本文实验设定粗调步长为 5mm,精调步长为 1mm, 取引流瓶在初始位置即距测压点高度为 100mm 时管道 内压分别为 1.6kpa 和 1.2kpa,设定期望引流速度,启 动引流速度调节,部分实验结果如表 3 所示。因实际引 流中引流速度低于 3 滴 /min,所以满足使用要求。
6 结论
本文设计完成了基于双目视觉的脑室外引流监控系统。采用双目视觉技术结合基于卷积神经网络的人体头 部关键点识别技术,能够实现对病人头部关键点的定 位,提出一种计算病人头部关键点高度的算法,只需角 度传感器实现对病人头部关键点的运动跟踪,床头为任 意角度时,得到病人头部关键点的相对高度。调整引流 瓶至安全高度范围,开始引流后,使用粗精结合的调节 方法,实现对引流速度的调节。本系统操作简单,可自 动调整引流瓶高度以控制引流速度,能有效降低医护人 员的劳动强度,提高引流过程的安全性。
参考文献
[1] 家珂,严荣国,魏若凡,等.脑室外引流实时定量监测系统设计 [J].电子测量技术,2020.43(14):171-176.
[2] 冯清亮,柯以铨,刘艳君,等.脑科引流固定器的设计与应用 [J].转化医学电子杂志,2018.5(8):5-7.
[3] 樊炳辉,刘圭圭,王传江,等.基于双目视觉的助老助残机器人 定位系统研究[J].现代电子技术,2017.40(2):48-52.
[4] 樊炳辉,张发,王传江,等.基于双目视觉的人机交互式机械手 控制系统和控制方法:中国,CN201310223530.8[P].2013-09-04. [5] 谭立行,鲁嘉淇,张笑楠,等.基于轻量级OpenPose改进的 幻影机手势交互系统[J].计算机工程与应用,2021.57(16):159- 166.
[6] 蔡锦达,齐建虹.基于ARM9的自适应模糊PID定长切割控制 系统[J].控制工程,2014.21(3):315-320.
[7] 杨程,严荣国,申家珂,等.基于ATmega32L的脑室外引流远 程监测系统[J].电子测量技术,2020.43(13):177-181.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/58193.html