SCI论文(www.lunwensci.com):
摘 要:在智慧交通监控系统中 , 图像处理技术是很关键的技术之一。通过提取监控摄像机记录的视频图像 , 以视频图像作为分析对象,通过图像预处理、图像去模糊、图像锐化等处理技术实现对车辆的检测和识别 , 能够快速有效的实现对运动车 辆的识别。这一研究成果为下一步在交通监控中的应用打下了坚实的基础 , 具有明显的实际意义。
关键词: 图像预处理 ;运动去模糊 ;车辆识别
Research on Application of Image Processing Technology in Traffic Monitoring System
LU Wei
(Yuncheng Vocational and Technical University, Yuncheng Shanxi 044000)
【Abstract】: In the intelligent traffic monitoring system, image processing technology is one of the key technologies. By extracting the video images recorded by the surveillance camera, using the video images as the analysis object, the detection and recognition of vehicles can be realized through image preprocessing, image deblurring, image sharpening and other processing technologies, which can quickly and effectively realize the recognition of moving vehicles. This research result has laid a solid foundation for the next application in traffic monitoring and has obvious practical significance.
【Key words】: image preprocessing;motion deblurring;vehicle identification
1 背景及意义
近几年,机动车辆数量急剧增加 , 面对着有限的道 路路面等基础设施 , 城市的道路交通环境迅速变化。再 加上日常路面施工养护、人们交通意识淡漠等原因,导 致车辆违章违规、交通事故、能源紧缺、大气污染严重 等许多问题。传统的收集道路交通信息的方法相对落伍 且滞后 , 已无法满足现有需求,所以智慧交通已经变成 了交通管理的前沿研究方向,而道路交通监测系统也在 这种日益增长的需求下,获得了快速的发展。
在实际路面上抓拍的机动车视频,由于不能直接通过 收费站的卡口,导致收集不到机动车的车牌信息,而从现实路面上抓拍的汽车图片也往往会产生运动模糊,由于图像去模糊的研究成本也相对较低,因此,研究运动模糊图像的复原技术在智能交通管理领域有着更广阔的应用前景 [1]。
2 运动目标提取方法
从获取的视频图像中实现背景与运动目标的分离是运动目标提取的根本。通过静止背景提取法来分离前景 是交通监控系统中常用的方法。常见运动目标提取有背 景差法、帧差分法和光内部流场法 [2]。
2.1 背景差法
背景差法是当前进行运动目标信息检测与获取的优 选方式之一,此方法计算简单,容易实现 ;但缺点是需 不断对背景信息进行学习,内存需求高,对背景波动较 大的检测效率也不甚理想。因此,Stauffer 与 Grimson 共同提供了基于高斯混合模型的背景模型方法 [3],该方 法主要是通过使用多种高斯分布对背景模型,每一种高 斯分布都对应于其中的一个背景像素模型,以尽可能的减少背景扰动问题 ;通过不断更新背景,达到对背景变 化的自动适应效果。本文采用该方法提取和保存前景图 像,给今后的搜索提供样本库。
2.2 帧差法
帧差法是事先需要设置一个阈值,选取时间连续的2 ~ 3 帧图像作行差分,当差分绝对值超过这个设置值 时,我们认为是运动区域,反之,则认定为背景区域。 总的来看,帧差法由于其原理简单,计算量相对较小, 可实现运动目标的快速检测,但该方法也有缺点,检测 目标易产生“空洞”,因此该方法一般不单独使用,通 常和别的算法结合来使用。
2.3 光流法
光流法是利用物体运动的光流动现象和光流方程算出图像中所有像素点的运动状态向量,根据运动状态向 量变化大小来检测和提取运动目标。该方法也并不仅仅 只在视频背景静止的情况下才适用,当监控镜头发生运 动或者图像背景产生改变的时刻,光流法依然能够完成 对运动目标的测量和追踪,但这个方式的主要弊端是无 法完全获得运动目标的轮廓,且计算过程比较繁琐,难 以达到实时监测的目的,因此实际场合中较少用到。
3 图像处理中的预处理技术
预处理是交通监测中机动车识别流程中的一项重要 环节。受光线明暗程度及图像质量差异等因素的影响, 输入图象中常常伴随着噪声。同时,摄影距离、焦距的 差异也导致录制的车辆图像尺寸不一样。经过预处理技 术加工处理后的图像,在尺寸和质量上保持统一,为后 期的特征向量的提取提供保障。
图像平滑是预处理技术中经常用到的一种技术,其 目的在于滤除这些随机噪声。常用的图像平滑方法有线 性滤波和中值滤波等。
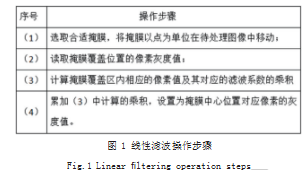
3.1 线性滤波
线性滤波器是选用合适的掩膜来计算邻域内像素的 像素值与滤波系数的乘积,通过计算的乘积和来替代图 像中对应像素灰度值来实现图像平滑的目的,具体操作 步骤如图 1 所示。
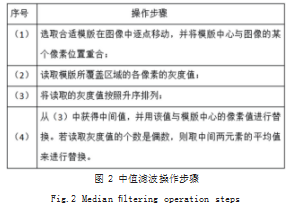
3.2 中值滤波
中值滤波是一个经典的低通非线性滤波,对于抑制 脉冲噪音和消除尖波干扰噪声都具有良好的效果,同时它还可以在减少噪音的同时使图像的边缘保持完整。中 值滤波的基本思路为读取模版覆盖区域内的所有像素灰 度值并按升序排列,取该序列中的灰度中间值为当前图 像最大的灰度值。其具体步骤如图 2 所示 :
4 图像处理中的去模糊技术
在现实场景中获得的视频图像往往会存在运动模 糊,这就需要我们事先要去运动模糊。常用的盲去模糊 的几种方法分别是边缘预测的方法 [4]、变分贝叶斯的方 法 [5-6] 和最大后验概率的方法。采用边界预测的方法通 过滤波器进行了图象边界的复原 [7],这个方法的好处是 在处理某些模糊核尺寸比较小而模糊图像较大的图象上 得到了良好的复原结果,缺点在于要重复进行预测,使 得噪声叠加对算法影响较大。变分贝叶斯方法有较好的 鲁棒性 [8],但计算比较复杂。最大后验概率方法是根据 模糊核与清晰图的稀疏性完成模糊图像的复原,这种方法速度慢,设置繁琐,对图像复原具有不确定性。
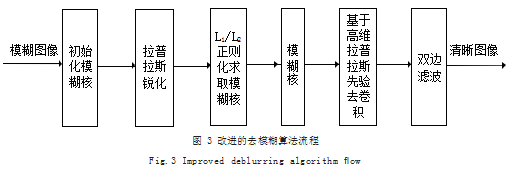
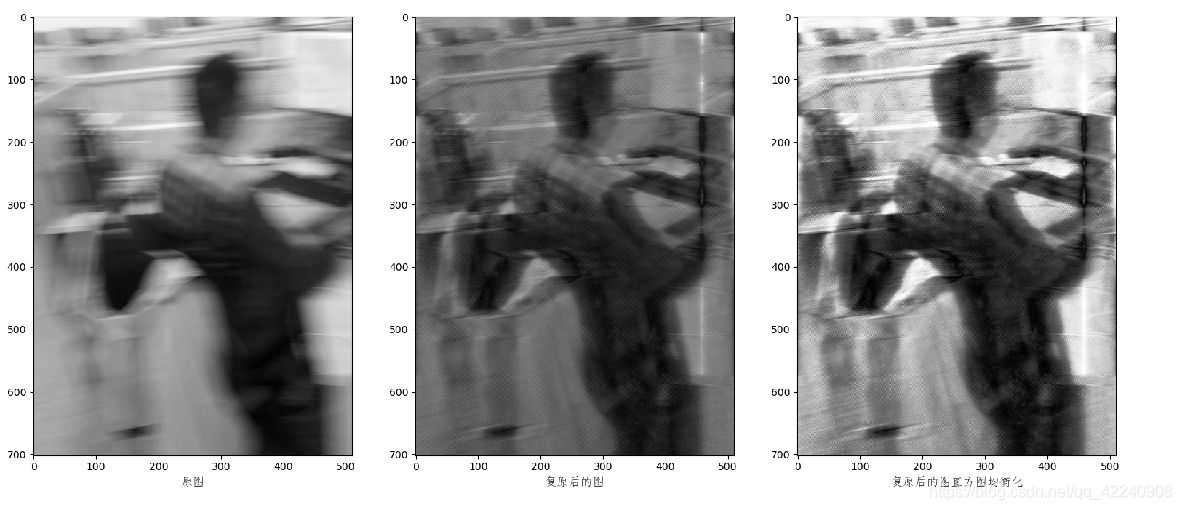
本文还提供了一种需要改进的方法,通过锐化处理 和 L1/L2 正则化求取精细模糊核,利用高维拉普拉斯先 验复原图像,最后经滤波器滤波得到清晰的图像。利用 这些复原方法,能够对这些运动模糊后的图象进行实现 高效的运动复原,从而可以得到更清晰的复原图象,具 体复原计算操作过程如图 3 所示。
4.1 拉普拉斯锐化原理
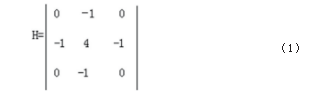
在交通监控视频中获得的图像很多边界都不清晰, 使得无法精准的估算模糊核。通过拉普拉斯锐化处理 后,获得清晰边缘及轮廓线,为后边的模糊核的估计提 供良好基础。其中一个模板形式如下 :
借助该模板,图片中较暗的区域中的某个点在经过 拉普拉斯锐化处理之后,会变得更明亮。本文重点就是 运用了拉普拉斯锐化算子,能够非常好地突出了图象中的 孤立节点和孤立边线之优点,对图象进行了拉普拉斯锐化 处理之后,使得模糊的边缘、细节甚至轮廓会显得更为清 晰明显,这与对模糊核的正确估计有着很大的关联 [9]。
4.2 正则化的方法
交通监控系统中采集的模糊图像可以看成是清晰图 像卷积上模糊核后再与噪声的叠加,具体的模型可以表 示为 :
B = L ⊗ k + N (2)
B 是模糊像素,L 是待恢复的清晰像素,k 为估计的 模糊核,N 为噪声。本文用 L1/L2 正则的方法求取模糊 核 k,再用基于高维拉普拉斯先验的方法进行图像复原。
在去模糊核时,采用在模糊图像的高频空间上估 算。其优点是效率更高且费用低。最终通过优化代价函 数实现对模糊核的估计。代价函数如(3)所示 :

其中 :x 权值是清晰约束图形的高频模糊空间, ∂y是将观测的模糊约束图形的高频朦胧空间,k 权值为模糊约束核,且满足

,ϕ项权值是模糊约束中的项权值, ⊗为二维卷的累积模糊算子。
5 结论
综上所述,图像处理技术在交通监控系统中具有很 高的使用价值,而算法的研究与改进是此项技术的核 心,这就要求技术人员不断对算法进行改进和创新,进 一步提高在交通监控领域的应用价值。同时,技术工作 人员也需要进一步了解技术的使用流程,以保证在实际 应用过程中可以对图像信息做出更准确地处理。随着科技的日益发达,未来在交通监控系统中,图像处理技术 将继续改进图像去运动模糊算法和增强图像去运动模糊 算法的训练学习强度,提高模糊核估计的准确性和识别 的准确度。
参考文献
[1] 朱丽英,梁辰,张鸿洲.基于运动目标的监控视频检索方法[J]. 计算机应用与软件,2011,28(12):96-98.
[2] Stauffer,Chris,Grimson,et al.Adaptive background mixture models for real-time tracking[C].IEEE Conference on Computer Vision & Pattern Recognition,2007:2246. [3] 姚海波.监控视频中运动车辆检索的研究[D].合肥:合肥工业 大学,2016.
[4] Cho S,Lee S.Fast motion deblurring[J].Acm Transactions on Graphics,2009,28(5):89-97.
[5] 阮光诗,孙俊喜,孙阳,等.处理异常值的相机抖动模糊图像复 原[J].中国图象图形学报,2014,19(5):677-682.
[6] Levin A,Weiss Y,Durand F,et al.Understanding and evaluating blind deconvolution algorithms[C].2013 IEEE Conference on Computer Vision and Pattern Recognition, 2009:1964-1971.
[7] Xu L,Zheng S,Jia J.Unnatural L0 sparse representation for natural image deblurring[C].IEEE Conference on Computer Vision & Pattern Recognition,2013:1107-1114. [8] Levin A,Weiss Y,Durand F,et al.Efficient marginal likelihood optimization in blind deconvolution[C].IEEE Conference on Computer Vision & Pattern Recognition, 2011:2657-2664.
[9] Xu L,Jia J.Two-phase kernel estimation for robustmotion deblurring[C].Computer Vision-ECCV,2010:81-84.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jisuanjilunwen/35940.html