SCI论文(www.lunwensci.com):
摘要:在相关控制理论课程的教学过程中,尝试使用特定建模软件进行实践性教学创新,将枯燥的理论知识点讲授和贴近实际的工业模型相结合,学生在具体学习过程中可以直观立体感受到宏观知识点的应用实例,从而加深对理论点的掌握,更好的实现融会贯通。本文以课程教学过程中涉及到控制系统回路时域及频域分析为例,通过引入SimulationX仿真软件,建立模型,直观讲解汽车动态模型和控制器模型,使学生不仅掌握理论知识,且实践技能得到提高,更进一步可以激发学生的自主创新能力。
关键词:控制系统;实际模型;控制器设计;汽车模型
本文引用格式:郭龙川,等.实际系统参数模型在控制理论课程教学中的应用[J].教育现代化,2019,6(27):137-139.
一前言
《机械控制工程》课程是高等学校自动化和机械工程等本科专业(主要偏重机械工程专业)中培养学生控制理论与应用基本理论和自动化技术工程应用实践能力的课程,是进一步学习机械及自动化专业课程和从事工业自动化的先修课程[1,2]。《机械控制工程》主要培养学生具备建立机械工程控制系统的能力,掌握控制系统分析、设计的理论基础,培养学生运用专业基础知识解决问题的能力,使学生具备对机电一体化控制系统进行分析、设计的具体技能,达到初步解决机械工程中控制问题的能力。最为重要的是,需要培养学生具备系统工程的思维,建立反馈控制回路的概念,形成相互影响,相互干预的系统论思想,在今后实践工程应用中建立大系统的概念。
这门课在传统的教学过程中,主要以纯理论知识点讲授为主,诸如系统建模、传递函数、系统时域分析、系统频域分析等。而这些理论知识点,从基本构成上讲,数学性较高,理解起来较为枯燥,尤其贯穿始终的是很多数学理论,其考核内容也大多以解题为主,多数以纯数学题的面貌呈现在学生面前。然而这种讲授比较容易忽略了控制理论需要结合实践应用的特征,纯知识点的讲授不能给予学生针对实际工程应用进行控制理论应用的切身体验,单纯让学生将更多的精力聚焦于纷繁复杂的数学公式计算,这种教学模式属于较为传统的模式,较容易脱离课程实际,且灌输式的教学对于学生深刻理解知识点也会事倍功半。基于此,针对机械控制工程这门课理论与工程应
用的客观需求,教师在教授课堂知识之余,需要将知识融入进具体工程实践问题当中,做到融会贯通。而对于课堂教学来说,又不能将纯工程化的实践知识替代理论点,那么在这两者之间找到一个恰当的结合点,显得尤为重要。在以往的课堂实践中,针对控制理论的知识要求,通常安排matlab仿真模拟,即对时域和频域进行设计分析,然而这种脱离实践的简单上机对理论点的巩固和实际背景应用的体验仍然难以达到良好的教学效果。针对这类现状,本人在机械控制工程教学过程中,使用最新的建模软件Simulation X[3]进行工程实践教学,使学生在理解知识点理论内涵的基础上形成立体的详细的工业反馈控制回路的思想框架。
SimulationX是在工程高级建模和多学科仿真领域的一款分析评价技术系统内各部件相互作用的权威软件,是多学科领域建模、仿真和分析的通用CAE工具,并具有强大标准元件库,这些元件库包括:1D力学、3D多体系统、动力传动系统、液力学、气动力学、热力学、电子学、电驱动、磁学和控制。另外,SimulationX还具有强大的后处理系统。SimulationX的模型库包含大量与工业界合作伙伴和研究机构密切合作开发的标准元件,且面向用户的模块和版本、多功能性和众多软件接口,使SimulationX可以满足用户不同应用领域的各种需求。
在系统传递函数建模和闭环回路时域分析及频域分析教学里,实际工业控制回路的控制对象、执行机构,控制器(控制律),测量反馈元件等都可以通过SimulationX软件的仿真建模直观的描述出来,包括呈现控制系统算法(PID、预测、模糊)等[4,5]。在系统稳定性和误差判断等教学内容中,稳定性的判断和奈氏图是教学的难点,通过引入SimulationX软件进行具体工业对象(如汽车总成模型)的建模和仿真,学生可以自主具备具体工程背景的控制系统回路的各项指标,诸如系统偏差值、系统脉冲响应,系统阶跃响应等,并且在模型中进行在线分析,这些极大地加深学生理解抽象的传递函数、时域频域、稳态误差等的基础理论知识,拓展现有的教学方式[6]。
二 SimulationX软件在机电传动课程教学应用实例
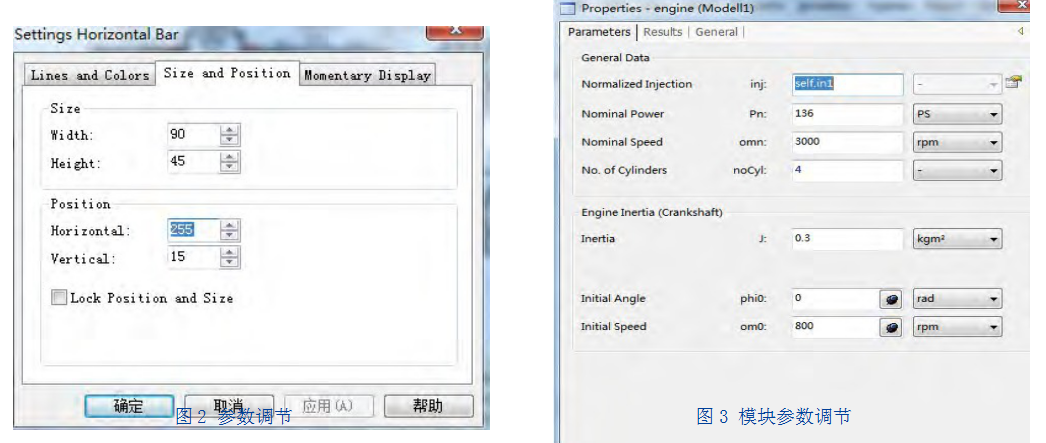
本文以机械控制工程的课程教学过程中涉及若干知识点为例,通过引入SimulationX仿真软件讲解具体建模类型。图1为典型的汽车动力总成的模型。其中涉及若干知识点:系统的状态方程,输出与输入设定、系统零点和极点以及极点配置、系统的稳定性分析等。学生通知在线仿真建模可以比较直观的将上述知识点进行系统化整合,通过模型分析进行很好的融会贯通。在线仿真可以得到实时的汽车状态。学生可以通过在线调整相关模块的参数(图2和图3)进行修改模型特性,从而对动态控制系统进行多条件多环境的处理分析[7,8]。
从模型中可以看出,通过仿真设计能计算出对应于汽车质量与电机惯性的振荡频率,而车轮(轴惯性)随着侧轴的惯性而振荡。另一方面,系统频率响应的极点和零点是以电机转矩作为输入和汽车加速度作为输出计算的。为了使模型独立于库其他元件,差速齿轮由内部模型GearType建模,非线性驱动电阻由内部模DrivingResistanceType描述。
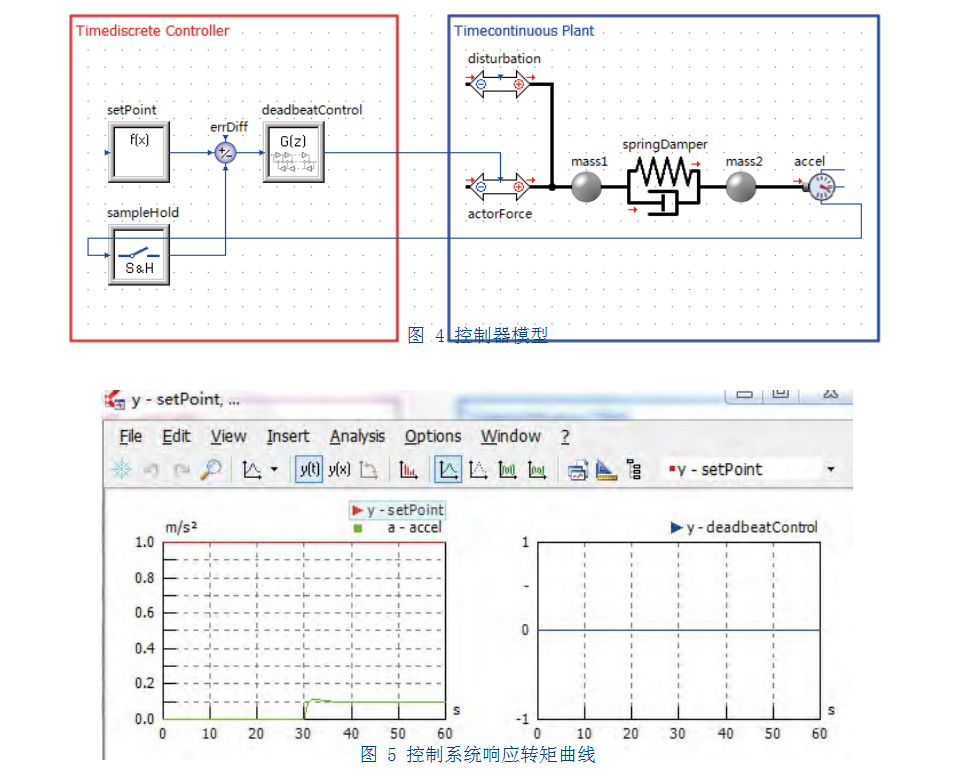
其次可以通过SimulationX建模软件对汽车总成模型进行控制器设计从而进行仿真分析,图4为针对时变对象的时变控制器的模型,借助SimulationX仿真建模软件进行搭建,通过对其在线控制器设计,可以直观观察得到电机输出转矩的变化曲线(图5)。
三SimulationX软件在本课程教学应用的实现
在机械控制工程这门课程的教学过程中,借助SimulationX软件,增加以汽车总成模型为工业对象的教学案例,通过对其进行建模后,而后在线仿真,最终形成汽车模型参数和控制回路曲线,学生可以直观地看到汽车控制系统在运行过程中实时的零点和极点值和当产出外部干扰之后自主驱动产生控制抑制直到最终趋于稳定特性的效果场景,而在这其中产生的系统各个参数实时变化,学生通过软件进行实时监测。通过参数变化的特征,学生在模型的基础中,可以对闭环控制回路进行改变,或者针对某以特定目标性能进行系统优化,从而达到控制目标。在此过程中,学生不仅掌握机控制理论的各项基本概念,同时也建立了各个系统论的各个知识点和比较立体的系统工程思维框架。
四结语
将SimulationX建模软件应用于机械控制工程课题教学过程中,针对对应的理论知识点增加汽车总成模型和控制系统模拟,将各个知识点融入进某一具体特定的工业背景中,让学生掌握理论知识的来龙去脉,且初步涉及多学科融合的相关领域。通过此举使学生不仅掌握了理论知识,还有助于提升他们的实际设计能力,更进一步可以激发学生的自主创新能力。对于课程建设,这有助于进一步完善教学资源,扩宽了现有的教学方式。
参考文献
[1]杨叔子等.机械工程控制基础[M].武汉:华中科技大学出版社,2012.
[2]吴熙等.自动控制原理[M].北京:清华大学出版社,1995.
[3]刘艳芳.SimulationX精解与实例[M].北京:机械工业出版社,2010.
[4][Z.J.Wu,X.J.Xie,S.Y.Zhang.Stochastic adaptive backstepping controller design by introducing dynamic signal and changing supply function[J].International Journal of Control,2006,79(12):1635-1646.
[5]S.J.Liu,J.F.Zhang,Z.P.Jiang.Decentralized adaptive output-feedback stabilization for large-scale stochastic nonlinear systems[J].Automatica,2007,43(2):238-251.
[6]Z.G.Pan,Y.G.Liu,S.Shi.Output feedback stabilization for stochastic nonlinear systems in observer canonical form with stable zero-dynamics[J].Science in China(Series F),2001,44(4):292-308.
[7]Y.G.Liu,J.F.Zhang,Z.G.Pan.Design of satisfaction output feedback controls for stochastic nonlinear systems under quadratic tracking risk-senstive index[J].Science in China(Ser.F),2003,46:126-145
[8]Z.J.Wu,X.J.Xie.Adaptive bacckstepping controller using stochastic small-gain theorem[J].Automatica,2007,43(4):608-620.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网! 文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jiaoyulunwen/9413.html