SCI论文(www.lunwensci.com):
摘要:随着现代社会的不断发展,电动汽车无疑是未来汽车行业发展的主攻方向和必然选择,并将逐渐代替传统燃油汽车的地位。ADVISOR作为专业的电动汽车仿真软件,以其图形化、模块化、模型代码的开放性,为广大的科研院所和高校所使用,为此提出基于ADVISOR二次开发的简单教学方法,使学生能更好地掌握电动汽车的工作原理,在了解整车模型的基础上,进一步对控制策略开发,有助于提高学生自身专业水平,提升教学效果。
关键词:ADVISOR;汽车仿真;二次开发;教学法
本文引用格式:韦超毅,等.基于ADVISOR的电动汽车仿真及二次开发的教学法[J].教育现代化,2019,6(71):182-185,188.
在石油化石燃料不断消耗的今天,环保型的纯电动汽车成为汽车专业人员研究的重难点,电动汽车的开发涉及包括传统的机械结构、电气电磁、能源储存与效率问题等多方面学科技术交叉,同时,其技术新、难度高,在关键的电机、电池、电控等技术上,对学生的理解能力提出了很高的要求。
为了让学生更好地熟悉电动汽车的关键技术,提出基于ADVISOR电动汽车仿真平台的教学方法。ADVISOR是基于MATLAB/Simulink软件环境下运行的,数据库中的车辆模型和控制策略开放,能够完成电动汽车各种工况下的动力性、经济性测试。[1]通过修改车辆参数、控制策略,仿真后可以直观地发现车辆性能的变化,而不需学生掌握电动汽车整个系统建模,降低了学生学习难度,模块化的建模也会让学生的认识更加清晰、深刻,有助于教学工作的展开。
一 ADVISOR仿真过程
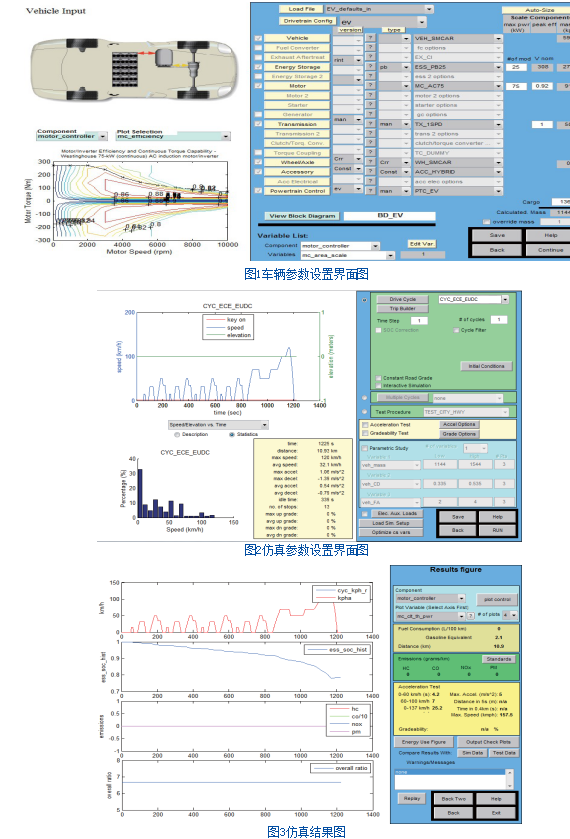
ADVISOR仿真过程分为:车辆参数设置、运行工况及初始条件设置、仿真结果后处理分析三部分。
(一)车辆输入设置
启动软件后,进入整车输入端口,如图1所示,该界面左侧为某一类型车辆的动力传递示意图及相关图像示意,右侧显示的是该车辆参数或具体车辆部件的选型的默认值,可根据需要自定义修改。
选择载入电动汽车后,可见包括整车(Vehicle)、能量储存系统(Energy Storage)、电动机(Motor)等部分。可通过View Block Diagram进入该车型整车MATLAB/Simulink模型中进一步深入学习模型搭建。
(二)仿真工况
在仿真参数界面,如图2所示,可选择不同的仿真工况(Drive Cycle)或自定义编辑全新的工况,界面左侧的图表为该工况的对应数据,右侧则包括初始条件(Initial Conditions)设置、加速测试(Acceleration Test)、爬坡测试(Gradeability Test)等仿真参数的设置。
(三)结果分析
车辆整车参数和仿真工况参数设置完成后,点击run运行,得到仿真结果,本文以软件默认的参数在CYC_ECE_ECUC行驶工况下进行仿真,结果如图3所示。
ADVISOR仿真结束后主要输出包括:整车动力经济性能的主要参数随时间的变化曲线、加速爬坡测试的结果等。除此外,还可以在该界面输出图像结果与其他仿真工况进行对比,直观明了展现变化之处。
二 ADVISOR的二次开发
由于ADVISOR软件开发的年代比较久远,在部分整车模型和控制策略算法上存在着不足之处,或是在只需要针对某一部件进行研究的情况下,可以通过另外搭建自身的实验数据模型或策略替代软件自带的对应部分,来达到研究效果,同时还省去了搭建整车系统的繁琐时间,提高开发效率,得到更优的教学效果。
本文的二次开发以修改ADVISOR电动汽车模型中的电机控制策略为例,其他的参数工况设置保持不变,来进行二次开发的简单示例。
(一)新建控制策略
ADVISOR自带的电机控制策略模块是通过输入变速箱模块需求转速、功率等参数,计算得到向电池组发送的请求功率信号,然后根据蓄电池组模块的实际输出功率计算电机的实际输出转速和转矩再沿着前向路径向下传递到变速器模块等。[2]
搭建的控制策略主要由两部分组成:一是体现驾驶员意图的驾驶员模型,输入整车实际车速和工况车速,输出驾驶需求转矩的修正系数;二是基于电池荷电状态和转速变化率的SOC模糊控制器,输出补偿系数。[3]最后利用这两部分对电机需求功率进行最后的修正,控制策略模型如图4所示。
(二)更改库文件
本文只改变电机控制策略,整车参数、工况一概不变,整车模型如图5所示。
整车控制策略模块位于<vc>ev模块中,包括牵引力控制、变速箱控制、电机控制等模块。
首先打开ADVISOR控制模块数据库,断开连接并解锁后,复制<vc>ev,粘贴后重命名为<vc>ev_1,再将新建的控制策略嵌入<vc>ev_1中,完成模型修改后保存。
再进入软件自带的电动汽车原顶层模块中,用<vc>ev_1替代原<vc>ev控制模块,然后将BD_EV另存为BD_EV_1,以防止破坏数据库原数据。
最后完成m文件的修改,将原电动汽车的载入文件EV_defaults_in.m复制粘贴后重命名为EV_1_defaults_in.m,把EV_1_defaults_in.m文件中的前两行改为:
vinf.name=’EV_1_defaults_in’;vinf.drivetrain.name=’ev_1’;
在MATLAB命令窗口输入以下命令,添加车辆模型:
options.input_file_names=optionlist(‘add’,’input_file_names’,’EV_1_defaults_in’);
options.drivetrain=optionlist‘(add’,’drivetrain’,’ev_1’);为了使控制策略模型和新建车辆模型一一对应,
打开ADVISOR中gui文件夹里面的block_diagram_name.m文件,添加语句(并保存):
case‘ev_1’bd_name=’BD_EV_1’;在gui文件夹gui_image.m文件中补充缺少的图片信息,添加:
case‘ev_1’ev_1_im=imread(‘electric.jpg’,’jpg’);h2=image(‘Parent’,h1,...
‘Button Down Fcn’,’gui_select’,...‘CData’,ev_im,...
‘Tag’,’ev_1_image’);
设置新建车辆所需的部件代码,在gui文件夹的InputFigControl.m中添加:
case‘ev_1’fields2remove={‘fuel_converter’,’generator’,’exhaust_
aftertreat’,’torque_coupling’};
在gui文件夹的ImageInfo.m文件中添加新建车辆相关图形信息:
case‘ev_1’im={
‘energy_storage’ [141 186 35 125]
‘motor_controller’[215 247 27 75]
‘transmission’ [271 290 60 101]
‘wheel_axle’ [61 117 2 26]
‘wheel_axle’ [254 310 7 28]
‘wheel_axle’ [61 118 134 159]
‘wheel_axle’ [254 310 134 154]
};
通过以上修改,完成控制策略的二次开发。[4]
(三)仿真结果对比
完成对车辆参数、仿真工况参数以及新建的电机控制策略的搭建并嵌入整车控制模块后,进行仿真得到运行结果,包括电池SOC变化曲线、电机实际输出转矩、车轮实际驱动力以及加速试验的测试结果等。
如图6、图7所示,修改控制策略前后,电动汽车的动力性、经济性有所变化,较修改控制策略前,修改后0-60km/h加速时间增加了0.2s,60-100km/h加速时间保持不变,在体现经济性的SOC电池变化曲线的对比上,修改后,荷电量下降更为平缓,剩余荷电量较修改前更多,延长了电动汽车的续航里程。
由此可见,所嵌入的控制策略已产生了不错的实际效果,表明二次开发的有效性。
三 总结
本文以仿真软件ADVISOR为教学平台,介绍了电动汽车整个仿真流程及二次开发的教学过程,由于ADVISOR具有操作简单,界面直观,友好,容易理解,可提高学生的学习兴趣并因此提高教学效果,不失为电动汽车相关知识教学的一个有力的工具。
参考文献
[1]余龙.山区路况下直驱型纯电动客车控制策略仿真与试验研究[D].北京理工大学,2015.
[2]祁华宪.基于驾驶意图识别的纯电动汽车模糊控制策略研究[D].合肥工业大学,2017.
[3]王庆年,唐先智,王鹏宇,等.基于驾驶意图识别的混合动力汽车控制策略[J].吉林大学学报(工学版),2012,42(04):789-795.
[4]周易.基于操纵意图识别的新能源汽车经济性控制策略的研究[D].合肥工业大学,2016.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网! 文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jiaoyulunwen/28277.html