SCI论文(www.lunwensci.com):
摘要:颚式破碎机是在多个课程教学过程中的重要研究对象,但在实践教学中面临着场地、经费、环境以及安全性等诸多方面的制约。与此同时,虚拟现实技术已在许多个学科的实验中成功应用。鉴于此,通过对颚式破碎机的基本结构和工作原理深入分析,使用Unity3D三维引擎设计并开发了一套颚式破碎机虚拟拆装实验教学系统,准确地展示颚式破碎机的工作原理,并建立符合实验特点的考核评价标准,在实验方案设计思路、教学方式方法、评价体系以及传统教学的延伸与拓展方面均有所提升。
关键词:虚拟现实;颚式破碎机拆装实验;实验教学;Unity 3D技术
本文引用格式:吴飞,等.基于Unity3D的颚式破碎机虚拟拆装实验教学系统开发[J].教育现代化,2019,6(69):95-98.
一 引言
颚式破碎机是水泥生产的关键设备之一,主要用于石灰石的粗碎作业。从矿山上利用爆破技术开采下来的石灰石多数都是粒度较大的块状物料,粒度一般都超过粉磨设备允许的进料尺寸,给配料及粉磨作业带来困难,因此需要入磨前将它们破碎成均匀的大小块(20mm以下)或颗粒状物料,这样便于预均化,使其化学成分趋于均匀,也便于与黏土质原料及硅质、铝质和铁质校正原料配料入磨,更便于粉磨,石灰石的破碎任务是由破碎机来完成的。此外出窑较大块的孰料、石膏、块煤等也需要破碎后才能入磨。
在教学中,颚式破碎机是建材机械和过程装备等专业的重要研究对象之一。在本科生教学中的课程设计、毕业设计会经常涉及到颚式破碎机。然而在实验环节,若运用传统的实验教学方法来完全讲解颚式破碎机,需布置较大的实验场地放置颚式破碎机及其实验用的石灰石等原料,其场地和成本是很多学校无法提供的。颚式破碎机的拆装实验中需额外的大型起重装备,并且其操作的危险性较高。此外,颚式破碎机工作时的噪音与粉尘问题也很突出[1]。
虚拟现实(Virtual Reality,VR)技术涉及仿真、计算机图形学和多媒体等技术的交叉技术,它具有:交互性、多媒体信息感知性、沉浸感、自主性等特点[2]。运用虚拟现实技术的虚拟仿真实验室已在工学、理学、农学、医学、管理学等11个主要学科领域都得到广泛应用[3-6]。
本虚拟仿真实验也基于虚拟现实技术开发,旨在引导学生在虚拟环境中完成颚式破碎机的拆装与分析,更好地帮助学生掌握设备的工作原理。另外,该项目已获批2018年国家级虚拟仿真实验项目,在实践教学环节中受到师生的一致好评。
二 颚式破碎机的基本构造及工作原理
颚式破碎机主要可以分为简摆颚式破碎机、复摆颚式破碎机、双腔颚式破碎机、外动颚式破碎机和振动颚式破碎机等。其中复摆颚式破碎机在建材装备中结构简单且使用广泛[7,8]。因此,该颚式破碎机拆装和设计实验采用复摆颚式破碎机。
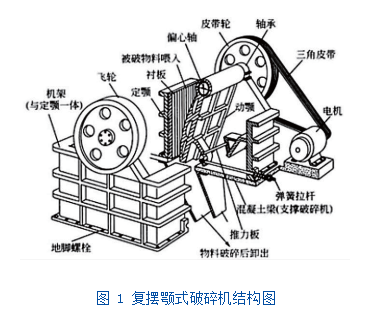
复摆颚式破碎机基本结构包括机架及定颚板、活动颚板、偏心轴、皮带轮和飞轮、推力板、拉杆、压力弹簧、调节螺杆等部件组成,如图1所示。
在复摆颚式破碎机工作时,电机带动皮带轮、偏心轴以及飞轮一起转动,由于动颚悬挂在偏心轴上以及动颚与推力板的相互作用,动颚会相对于定额做周期性的往复挤压运动。当待破碎的物料喂入,动颚相对于定颚靠近时物料会被压碎,动颚相对于定颚远离时物料会受自身重力下落继续压碎直至其足够小从出料口卸出。调节拉杆的作用是调节动颚的摆动幅度,以达到控制出料大小的效果。复摆颚式破碎机工作示意图如图2所示。
三 虚拟实验室的构建
(一)系统结构
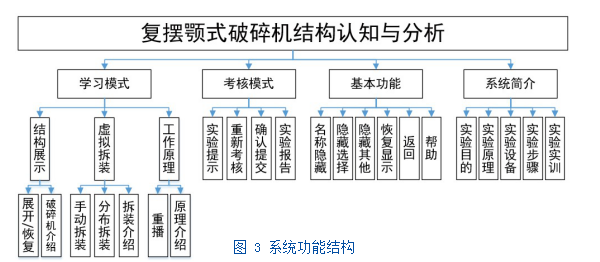
复摆颚式破碎机的虚拟拆装实验系统主要分为“学习模式”“考核模式”“基本功能”和“系统简介”四大部分。在“学习模式”中,学生可以通过“结构展示”、“虚拟拆装”和“工作原理”等不同的模式完成颚式破碎机的结构认知,充分掌握设备的功能特性及其结构组成。在“考核模式”中,学生需按考核要求进行实验操作,最后考核通过后会生成相应的实验报告。系统功能结构如图3所示。
(二)开发工具与开发流程
改完成即可发布虚拟试验系统。复摆颚颚式破碎机Unity 3D三维引擎开发工具能创建建筑可视化、三维视频、实时三维动画等互动内容,运用Unity 3D开发工具能有效地实现虚拟现实技术[9-12]。
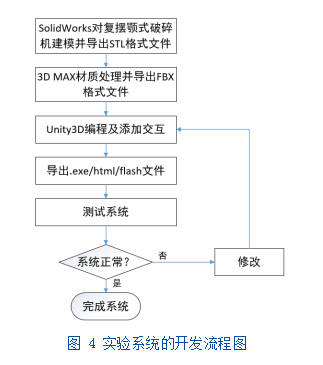
虽然Unity 3D开发工具自带有三维建模功能,但其效果和传统的专业建模软件相比差距较大,实现起来也比较复杂。因此,需要外部导入建好的复摆颚式破碎机三维模型。这里首先选用SolidWorks三维建模软件建立完整的颚式破碎机模型,然后将其模型导出STL格式后由3D Max软件进行材质等处理,最后由3D Max软件导出Unity3D所支持的FBX格式以便编程和添加交互。Unity3D所支持的脚本语言为JavaScript和C#,在本项目中使用的是C#语言。交互设计包括使用UGUI控件设计UI、使用包围盒算法进行碰撞检测等内容。最后为了检查交互设计中的功能是否运行正常、操作过程中是否存在Bug、UI界面是否协调等需要进行测试与修改。测试与修虚拟实验系统的开发流程图如图4所示。
(三)交互功能设计与实现
1.基本交互方式介绍
进入虚拟实验场景后,可通过鼠标操作使模型旋转、平移和缩放。其中,长按鼠标左键在界面内拖动可以实现模型的旋转;长按鼠标中键在界面内拖动可以实现模型的平移;滚动鼠标滚轮可以实现模型的缩放。
另外该系统还提供辅助学习功能供使用者操作。提供有“名称显示”/“名称隐藏”功能选项,当鼠标选中零部件时,显示/隐藏其名称。鼠标点击零部件时,其颜色会显示高亮,若选择“隐藏选择”功能,该零件将会隐藏,若选择“隐藏其他”功能,则除该零件外的所有零件隐藏。选择“恢复显示”功能,则完整显示。
2.结构组成及工作原理展示
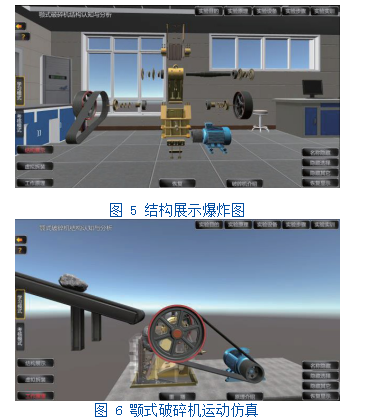
在“结构展示”功能中,颚式破碎机各零部件以爆炸图的模式展开,便于学生直观地了解破碎机的结构组成,如图5所示。使用“恢复”功能按钮,可观看装配仿真动画,初步了解复摆式颚式破碎机零部件的装配关系。
在“工作原理”功能中,可观察颚式破碎机的运动仿真,通过部分零件的透明化能够更加方便地观察设备内部工作原理。仿真动画播放完毕后可点击“重播”按钮反复观看,如图6所示。点击“原理介绍”按钮,弹出“原理介绍”悬浮框,学生可通过文字进一步学习颚式破碎机工作原理。
3.虚拟拆装
充分掌握破碎机的结构组成及工作原理之后,学生便可尝试进行破碎机的拆装练习。本实验采用引导式的“分布拆装”和自主式的“手动拆装”两种不同的方式使学生学习和掌握破碎机拆装的正确顺序。界面左下角的“虚拟拆装”功能包含“手动拆装”和“分布拆装”两个子功能。“分布拆装”功能又分为“上一步”、“下一步”和“拆装介绍”等,如图7所示。“下一步”或“上一步”功能是反复地仿真演示拆装过程的每一步,便于学生快速掌握破碎机结构组成、零部件之间的装配关系及正确的拆装顺序,“拆装介绍”功能是向学生展示破碎机进行拆装实验的目的。
熟练掌握拆装顺序后,学生可使用“手动拆装”功能进行自主拆装,“手动拆装”可分为“装配”、“拆卸”和“拆装介绍”三个子功能。使用“拆卸”功能按钮后,鼠标左键点击希望拆卸的颚式破碎机零部件,若拆卸的零部件顺序不正确则无法继续操作,同时系统提示下一步的正确操作。使用“装配”功能按钮,鼠标左键点击希望装配的颚式破碎机零部件,若装配的零部件顺序不正确则无法继续操作,同时系统提示下一步的正确操作,如图8所示。
4.考核模式
在学习模式下,学生可以反复进行拆装操作练习,当学生熟练掌握后,可使用“考核模式”。进入该模式后,学生需按考核要求进行实验操作。
考核模式下,学生需按照正确顺序依次点击颚式破碎机零部件以完成设备拆卸,当拆卸错误次数过多且按照“实验提示”的记分方法分数已经低于60分情况下,系统会弹出“考核成绩”悬浮框提示当前分数过低建议重新考核,如图9所示。
重新考核后,若对该次成绩不满意,仍可点击“重新考核”按钮再一次进行考核,直至成绩满意,即可点击“确认提交”按钮提交成绩,结束考核。成绩提交后,可点击“实验报告”按钮,生成实验报告,其内容为实验报告模板,学生可用于参考填写自己的实验报告。
四 结束语
基于Unity3D的颚式破碎机拆装虚拟仿真实验教学系统能够在一定程度上解决教学中存在的问题:
(1)实验方案设计思路:该系统绕开了实验场地、资金等限制,规避了不安全因素准确并层次分明地展示了相关知识。打破现实条件限制,提升实验教学效果。
(2)教学方式方法:改变教师主导模式,激励学生自主学习。该系统可在课后自主选择时间、地点登陆以进行实验操作,学生可多次重复实验操作直至完全掌握相关知识,给予学生充分的学习自由,激励学生自主学习,在充分实践的基础上理解、消化所学知识,有效提升实验教学效果。
(3)评价体系:该系统建立了符合实验特点的评价标准,确保考核体系的公正性和准确性,真实反映学生学习全过程的学习成效。改善结果认定机制,构建综合评价体系。
(4)传统教学的延伸与拓展:升华现有教学体系,突出理论联系实际。
参考文献
[1]马建新,胡衡彦.金属矿山颚式破碎机防尘技术实践[J].湖南有色金属,2018,34(05):61-63.
[2]张宜静,马治家,姜国华.基于虚拟现实的空间人控交会对接仿真实验系统[J].计算机仿真,2002(06):33-36.
[3]祖强,魏永军.国家级虚拟仿真实验教学中心建设现状探析[J].实验技术与管理,2015,32(11):156-158.
[4]汪云甲,杨敏,郭广礼,等.矿山测量虚拟仿真实验教学系统构建及应用[J].测绘通报,2016(07):129-132.
[5]李传,王振波,刘欣梅,等.石油化工与装备国家级虚拟仿真实验教学中心的构建与实践[J].实验室研究与探索,2018,37(05):162-167.
[6]李平,毛昌杰,徐进.开展国家级虚拟仿真实验教学中心建设提高高校实验教学信息化水平[J].实验室研究与探索,2013,32(11):5-8.
[7]王旭,夏晓鸥,罗秀建,等.颚式破碎机分类及研究现状综述[J].中国矿业,2018,27(S2):227-230+233.
[8]陈婷婷.复摆颚式破碎机运动机构的参数优化设计及机架振动力分析[D].江苏大学,2016.
[9]冯桂珍,池建斌,邢海军,等.基于Unity3D的减速器虚拟拆装实验[J].图学学报,2018,39(02):304-308.
[10]方沁.基于Unity和3dmax的虚拟实验室三维建模设计与实现[D].北京:北京邮电大学,2015.
[11]Menard M,Shi X M,Li Q.Game Development With Unity[M].Beijing:China Machine Press,2012.
[12]于潇翔,彭月橙,黄心渊,等.基于Unity 3D的道具系统研究与开发[J].成都理工大学学报(自然科学版),2014,41(4):523-528.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网! 文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jiaoyulunwen/27976.html