SCI论文(www.lunwensci.com):
摘要:水下ROV(水下机器人)技术在海洋装备集群中是较为典型的一种技术密集型产品,由多学科融合而成的水下ROV系统,存在普遍的基本理论基本概念与特定的应用对象并存的矛盾。本文以特定的驱动系统为案例,结合MATLAB图形化模拟,直观呈现其永磁同步电机的模型,三环控制回路,以及不同输入参数的不同系统响应。此举将多知识点融入进某一具体特定水下ROV系统中,已达到掌握理论知识的来龙去脉,初步理解多学科融合的系统化思维。
关键词:水下ROV;驱动系统;模型设计
本文引用格式:郭龙川,等.结合MATLAB图形化模拟的水下ROV教学探索[J].教育现代化,2019,6(35):130-132.
一前言
在海洋强国的战略思想指导下,在海洋工程领域集聚多学科多产业已经成为目前一种普遍的学界和业界的共识,而海洋装备则是涉海产业中较为高技术含量的一类方向领域[1-3]。那么与此相匹配的高等教育特别是针对海洋装备的研发设计能力的提升则显得尤为迫切。水下ROV(水下机器人)技术在海洋装备集群中是较为典型的一种技术密集型产品,因此水下ROV则是朝着集电气、控制、结构等多学科相融合的一种具有能获得较强实践应用能力的方向去展开它的课程培养模式。
水下ROV的教学内容基于它的内部构成以及部分关键技术展开,主要内涵有:结构设计、驱动设计、密封防腐设计、控制系统设计。驱动系统作为动力系统[4-8],在水下ROV中采用的是电机驱动,这部分内容牵连到电子电气专业;控制系统作为水下ROV的大脑部分,牵连到自动化专业,包括后期对控制系统的继续提升,诸如智能控制等,需要计算机软件的知识范畴;结构设计作为水下ROV的整体架构需要机械工程专业的指导,以及针对材料密封需要材料等专业知识[9,10]。因此作为一个多学科融合的专业课程,面对不同对象的讲授。需要有所侧重。而每个课程(控制、电气、自动化等)具体到水下ROV的其中每个部分,在讲授初期,都需要从基本原理,基本概念,基本属数学本质去引导学生。而这些专业化的基本概念是普遍意义上的,并不是针对某个特定应用对象,但是水下ROV作为一个特定的技术密集型海洋工程装备又是一个极特殊的构成体。基于这样的教学构成,需要将普遍意义上的基本概念和特别意义上的特定产品相结构,构成一种和谐的连接,如此便能在理论与应用之前找到平衡,使听者既可以理解基本理论的内涵,也可以掌握理论的具体应用,即多技术融合的水下ROV系统。
基于此种考量,本人在教学实践过程中尝试利用MATLAB图形化模拟设计的思路,将理论与应用相连接,以求达到上述的较佳效果。MATLAB图形化模拟设计的具体思路为:选取水下ROV系统中的电机驱动系统为案例,对其永磁同步电动机进行建模分析;针对水下ROV系统的交流伺服系统的电流环、速度环、位置环分别进行了设计;此外,基于simulink工具箱中的永磁同步电动机等建立了闭环伺服系统模型。通过模型仿真,分析系统结构参数对性能的影响,通过参数校正达到了理想控制效果。通过MATLAB图形化模拟,将自动化技术的基本理论基本概念内置于水下ROV系统中,使两者结合,达到理论教学和应用教学的较好效果。
二 MATLAB图形化模拟在水下ROV系统中的教学应用实例
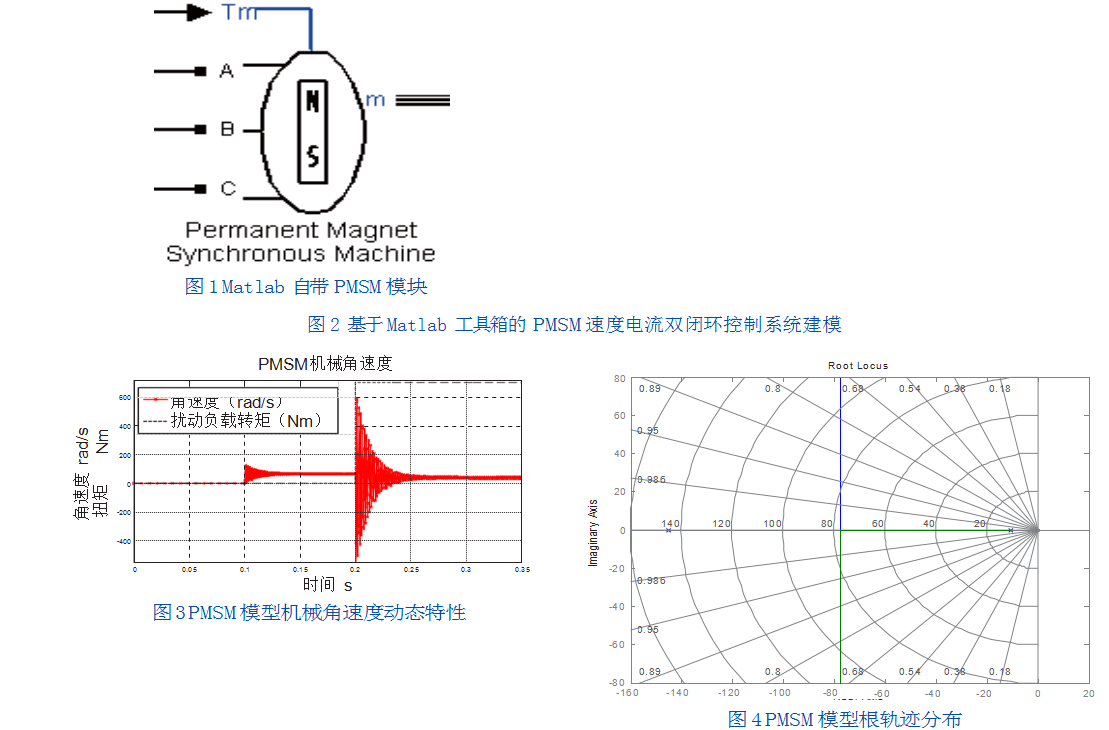
MATLAB/Simulink工具箱提供了水下ROV系统的驱动部分,即永磁同步电机的模块构建方案,利Simulink/SimPowerSystems/machine/路径下的Permanent Magnet Synchronous Machine(永磁同步电动机)模块可以方便的构建永磁同步电机仿真模型。该模型为气隙磁通正弦分布的三相永磁同步电动机,模型基于转子dq坐标系。定子三相绕组在内部连接至中性点,且中性点没有外接连线[11,12]。如图 1 所示,模型输入中的 ABC 为定子绕组的外部接线端,第四项输入 Tm 为等效到电动机转轴处的机械负载转矩。本文选用 SVPWM 控制方式,具体的SVPWM的算法由Matlab/Simulink分立模块实现,通过Matlab基本模块建立SVPWM算法模块,将dq坐标系下的电压转换为αβ坐标系下的电压;根据αβ轴电压判断所在扇区,同时根据αβ轴电压、频率和直流电压确定基本矢量作用时间;计算在当前第N个扇区时的基本矢量作用时间(一个周期内的基本矢量总的作用时间);计算三个比较器的值;分配基本矢量的作用时间,将比较器的值和载波比较,转化为矩形波输出,将作用时间转换为IGBT的开关状态。
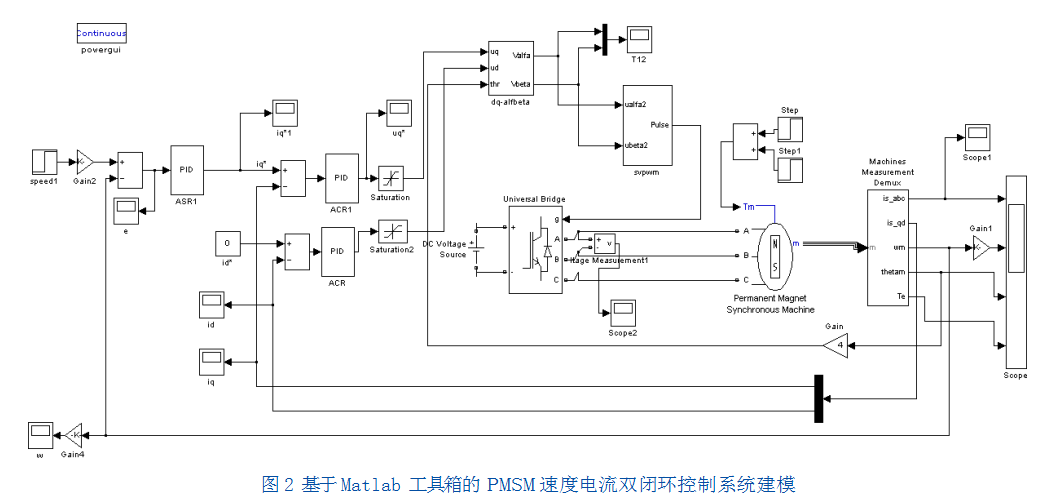
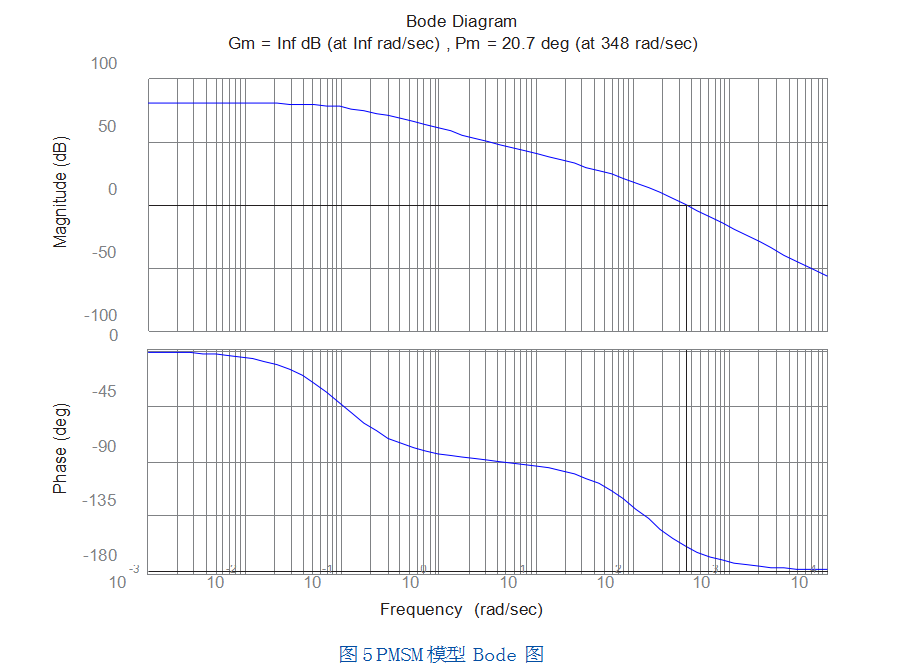
基于以上模块可以构建永磁同步电动机的速度电流双闭环控制系统模型如图2所示。针对图2模型,得到电动机输出的机械角速度曲线如图3所示。PMSM 上电之后经过约 25ms 之后,电动机机械角速度输出稳定在 60 rad/s,可得机械转速约为 600 rpm。在 0.2s 时加入 700Nm 的扰动负载转矩,机械角速度下降到 40 rad/s,而且稳态过程存在小振荡。根据电动机的机械特性曲线,加扰动负载转矩之后, 定子电流增加,进而电磁转矩增加,输出转速下降。在详细设计阶段,需要根据仿真结果,选取多组稳定后的速度-电磁转矩,绘制电动机的机械特性曲线。根据根轨迹和波特图可以看出,闭环系统的极点在 s 左半平面,但是相角裕度小,可以通过参数修改增加系统的稳定性。这样就完成了基于MATLAB图形化模拟的水下ROV驱动部分的教学分解,此举既展示的自动化技术,包括控制理论中的时域分析稳定性分析等内容,又结合了水下ROV的具体的特定对象,同时可以指导水下ROV系统的驱动选型设计。
三结语
由多学科融合而成的水下ROV系统,尝试将各个学科的基本理论与水下ROV具体实际结合,以特定的驱动系统为案例,结合MATLAB图形化模拟,直观呈现其永磁同步电机的模型,三环控制回路,以及不同输入参数的不同系统响应。此举将多知识点融入进某一具体特定水下ROV系统中,让学生掌握理论知识的来龙去脉,且初步涉及多学科融合的相关领域,使学生不仅掌握了理论知识,还有助于提升他们的实际设计能力,更进一步可以激发学生的自主创新能力。
参考文献
[1]J.Yuh.Design and Control of Autonomous Underwater Robots:A Survey.2000,1.
[2]Chunfeng Yue、Shuxiang Guo、Maoxun Li.Electrical system design of a spherical underwater robot(SUR-II).
[3]Jun Zhou,Cong Huang,Bo Liu,Ting Ting Wang.A Control System Design of Underwater Robot for Detecting Underwater Structures.Applied Mechanics and Materials,2014.
[4]ISO 13628-6:2006 Petroleum and natural gas industries-Design and operation of subsea production systems-Part6:Subsea production control systems[S].2006.
[5]滕学志.自主水下机器人能源与动力系统设计[D].中国海洋大学,2010.
[6]刘宝生.SimulationX多学科建模和仿真工具[J].CAD/CAM与制造业信息化,2009,9:34-36.
[7]李沁生,于家凤.基于Simulink的直流伺服电机PID控制仿真[J].船电技术,2011,3:26-29.
[8]Yazen H.Shakir.Theoretical Design of a Leg Module for a Hexapod Underwater Robot.American Journal of Mechanics and Applications,2017.7.
[9]Jagjeet Singh,Dhiraj Gandhi,Mayank Sanghani.Design and development of underwater robot.IEEE,2015.4
[10]He Li,Bo Yin,Shanshan Wang,Qingshu Yang.Design of underwater robot controller based on CAN bus.2011.8.
[11]Jun Zhou,Cong Huang,Bo Liu,Tingting Wang.A Control System Design of Underwater Robot for Detecting Underwater Structures.Applied Mechanics and Materials,2014.4.
[12]Ahmed M.Haidar,Chellali Benachaiba,Mohamad Zahir.Software Interfacing of Servo Motor with Microcontroller.2013.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网! 文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jiaoyulunwen/10323.html