SCI论文(www.lunwensci.com):
摘要:本文针对传统巡检采集数据周期长、巡检环境恶劣等因素,提出了基于视觉和WI-FI控制的双模式智能自主巡检机器人的方案。并对智能自主巡检机器人的控制系统部分进行设计。为了防止自主识别装置发生故障而不能完成巡检工作,还设计了上位机的无线通讯有效地完成移动机器人图像、距离以及运动控制指令数据的发送和接收。通过实验可得,该机器人能够对指定的监测点设备进行巡检,提高了巡检工作的工作效率。
关键词:智能巡检机器人;运动控制器;自主识别
本文引用格式:黄再辉,等.智能自主巡检机器人控制系统研究与设计[J].教育现代化,2019,6(34):99-100,109.
一 引言
目前,机器人的用途已经渗入到社会生活的方方面面,在特殊场合下机器人可以代替人类完成恶劣环境下的设备检测以及货物搬运等特殊任务[1]。本文设计一台双模式切换的通过视觉检测反馈而自主运行的智能自主巡检移动机器人。智能自主巡检移动机器人车体构件车体构件的选择需要本着经济、可靠、美观等各方面因素,想要智能自主巡检移动机器人达到理想的控制要求,必须要同时控制驱动电机来协调同步或异步工作[2],对于各个电机运行状态的实时性反馈以及准确性控制有着较高的要求[3]。
二 机器人整体设计
机器人通过移动平台搭载PC上位机,从而使得机器人拥有自主处理的能力。考虑到设备系统的使用环境以及使用条件,采用DCT0020运动控制器作为主控的移动底盘,可以实现两个电机进行PID参数设定,保证高精度驱动。同时采用两轮驱动,大大降低负载,使设备更加轻盈。
机器人采用双控制模式的设计,设置了自主巡检和手动巡检两种模式。机器人上装载的上位机通过视觉和超声波传感器搜集数据并实时进行处理。作为自主巡检的核心部分,当机器人的前方障碍物,超声波传感器反馈距离给上位机,做出躲避处理。一旦摄像头发现目标检测物时,通过视觉测距,精确定位后,机器人迅速前进到合适的位置,摄像头进行拍照,图像在上位机上处理之后,反馈给运动控制器是否停留,并触发报警装置。
三 机器人控制系统设计
智能自主巡检机器人的的控制系统是整个系统稳定运行的核心。控制系统的水平高低直接关系到智能化平台的智能化程度[4]。控制系统的设计策略也决定了整个设计系统的功能特点、使用范围以及其可扩展性[5]。根据对整个检测系统的功能需求,底盘移动平台的控制系统主要包括:电源模块、微控制器模块、运动控制器驱动模块、通讯控制模块等。
(一)整机控制设计
机器人的控制电路分为4个模块,运动驱动器下位机模块、电压检测及电源电压显示模块、视觉识别控制模块。各模块之间相对独立,便于检修。计算机上位机通过摄像头的图传发送器发送图像信息。计算机与运动驱动器通过USB-串口线相连,电压检测及电源电压显示模块为运动控制卡提供+24V电压通断控制,当电压低于标定阀值时,+24V电源断开,运动运动驱动器停止工作,否则运动驱动器正常工作。摄像头反转及LED灯照明装置控制模块接收微控制器STCAT89C51发送的电信号,控制装置采集和照明周围环境。
(二)自主模式的实现
机器人自主工作模块分为5部分,分别为图像处理模块、超声测距模块、网络通讯模块、信息融合模块、运动路径模块,如图1。
要采集前置摄像头的图像,采用基于Direct Show+OpenCv库的CameraDS类函数捕获图像,获取的图像存储在IplImage结构体中,该结构体包含图像数据指针的首地址,图像宽度方向像素点数目,高度方向像素点数目等信息,为直接图像像素点提供了可能,在处理图像的时候可以像处理矩阵一样进行操作。
1.待检测设备图像的预处理
为了抑制噪声、改善图像质量,要对图像进行平滑处理。图像平滑是一种空间域的图像增强方法,其目的是减少和消除图像中的噪声,改善图像质量,为图像的特征分析工作提供有利条件。
2.待检测设备轮廓的提取根据Canny图像边缘检测算法,把图像转化为灰度图像,使用函数cvCanny可获得灰度图像中轮廓的边界,函数cvStartFindContours可提取图像中各轮廓点的坐标,并将轮廓存储在一个指针中,访问图像中的每个轮廓,计算它们的面积,利用面积大于140且面积最大的判别条件屏蔽掉图像中噪声点的轮廓信息,获得的目标物轮廓坐标点,并将其存储在数据结构指针中。
3.待检测设备中心点图像坐标的确定通过图像分割处理可提取机器人识别所需轮廓,找到轮廓X坐标最大最小点Xmax、Xmin,Y坐标最大最小点Ymax、Ymin,由Xmax-Xmin、Ymax-Ymin组成两条直线求解两条直线的交点记为O即为目标物的中心点。
4.待检测设备相对于机器人信息的确定
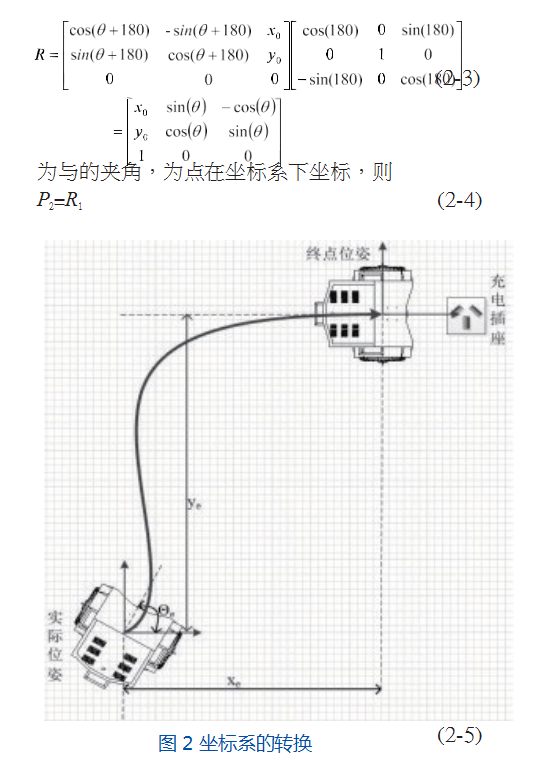
由前面标定的机器人在图像中的中心点和正前方点可以确定机器人在图像中的坐标系。如图2所示坐标系为图像坐标系,为机器人坐标系,为目标物相对于机器人正前方及Y轴方向的夹角,规定逆时针为正,顺时针为负,即当待检测在机器人的左手边时,检测到的角度为正值,在机器人的右边时,检测到的角度为负值,为了计算简单,把待检测物在坐标系下的坐标转化到坐标系下,所以坐标点在坐标系下可表示为:
 (四) 控制界面的实现
(四) 控制界面的实现
为了更灵敏、便捷地进行控制机器人,同时为了节约成本。开发了Microsoft Visual Studio的MFC控制界面应用程序。开机完成初始化之后,自动进入一级菜单界面,一级菜单界面包括界面开关按钮和相应的二级菜单界面入口。
(五)系统测试与误差分析
在移动机器人的驱动控制上,选用香港城动科技运动控制器,作为下位机控制伺服电机,以驱动两轮运动。我们调节运动控制器对左右伺服电机的PID参数进行整定,首先调节P参数,使系统响应无超调,稳态误差较小,上升时间较快。调节控制器的I和D参数选择设定的速度、加速度、加加速度等参数后,运动控制驱动器可驱动电机按照适当的S-曲线轨迹运动。
四 结论
(1)本文在充分考虑智能小车系统结构的基础上,设计了AVR单片机微控制器、运动控制驱动器、PC机和外部传感设备的接线图,各功能模块主要包括电源模块、微控制器模块、DCT0020运动控制器模块、电源检测模块、Wifi通信模块。
(2)机器人开环运动控制程序,根据对机器人建立的运动学刚体模型,开发了前置摄像头识别算法,结合测距超声波传感器,实现了机器人自主识别和自主巡视任务。
(3)在执行自主执行巡视任务的过程中,可以通过建立后台电脑和机器人上的华硕笔记本的无线通讯网络接口,可以有效地完成移动机器人图像、距离以及运动控制指令数据的发送和接收,满智能自主巡检机器人控制需求。
参考文献
[1]蔡自兴,贺汉根,陈虹.未知环境中移动机器人导航控制研究的若干问题[J].控制与决策,2002(04):385-390+464.
[2]崔明月.复杂环境下不确定轮式移动机器人运动控制的研究[D].重庆:重庆大学,2012.
[3]钱信.基于ARM的移动机器人设计及避障研究[D].南昌:南昌大学,2012.
[4]江政儒.地面移动机器人的视觉信息系统设计与实现[D].南京:南京理工大学,2013.
[5]Nildeep Patel,Richard Slade,Jim Clemmet.The Exo Mars rover locomotion subsystem[J].Robotics and Autonomous Systems,2010,V47(4):227-242.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网! 文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/jiaoyulunwen/10073.html








