SCI论文(www.lunwensci.com):
摘要:本文介绍了一种基于STM32的智能消杀作业机器人,其核心部件包括智能无人车载底盘、消杀喷雾模块、红外体温监测模块、装载模块、无人机追踪模块和STM32单片机,可接收来自移动平台、专业控制设备等多种平台的控制指令。该机器人实现了对公共区域的远程监控及无人化自动作业,具有自主、智能、便捷、高效的优点,有效地解放了人力,提高了工作效率,降低了工作人员的感染风险,具有良好的使用前景。
关键词:ARM-STM32;智能消杀;远程控制;智能机器人;公共卫生安全
0引言
目前,数字化、智能化已是我国智能医用机器人的主要发展方向,随着国内外产学研合作的逐渐开展,我国高度重视医用机器人的发展。机器人技术在医学应用领域还会进行更深层次而广阔的研发与应用[1-2]。公共场所大规模的消杀工作需要巨大的人力资源,但同时又增加了交叉感染的可能性,因此人们创造性地提出智能消杀机器人的设计理念,用以完成对医院、机场等人员密集场所的无人消杀工作。
1系统总体方案设计
智能消杀机器人通过移动APP控制,系统主要由前端采集、后端控制、云端管理、检测报警分析等模块构成,借助物联网能够对前端采集系统实时控制,并收集城市空气安全重大信息,可筛选疑似感染者、对源头进行溯源跟踪、实时形成信息通报,从而建立检测、报警、分类、跟踪、报告一体的区域安全信息监控预警系统[3-4]。其监测指标包括致病病毒等,测试结果将实时上传云端。而模块化定制服务则搭载可自动导航巡逻、识别健康码、支持消杀、运输作业的多模块组件装备,具有远程操作、实时在线监测等特点,适宜设置于医院、海关等人流密集场所。
1.1项目需求
为了降低接触传染的风险,智能机器人在医院、物流、巡检等领域逐渐走向了消杀作业的前线,具备测量、辨别口罩穿戴状况、健康码辨识、远程对讲和语音播报等功能,可有效协助医院、高校、社会等公共场所开展消杀工作。
1.2系统概述
本项目的核心技术是通过对空气中的气溶胶、飞沫等颗粒物的快速冷凝吸收,达到对空气中致病微生物的富集效果。同时结合生物免疫技术、智能图像识别技术、5G传输技术对采集样本进行快速检测与识别,并可将检测结果发送至云平台数据中心[5]。
云端控制系统搭载智能操控系统,具有即时进行人工操作、云端任务派发、远程语言交流等功能,使机器人的操作、监测、任务派发等更为简单。
机器人控制系统可接收来自移动平台、专业控制设备等多种平台的指令,以及诸如雷达信号、红外探测信号等各种复杂信息,并通过MDS复合数据链条传输,工作于互联网、移动网络、Wi-Fi信号网络环境。在平台中,系统可以将机器人连接在一起形成云,操作者可以通过终端设备进行管理(见图1)。
1.3功能实现
本智能消杀机器人是一款主要针对公共场所室内环境中的致病微生物在线监测的预警设备,该设备主要分为核心设备和功能设备两大模块。
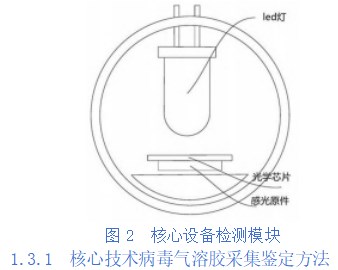
核心设备模块:是用以监测致病细菌或病毒等的空气监测模块。该模组又由旋风式生物气溶胶散射采样器、光传感器晶片(新型纳米等分子光学NanoSPR传感器晶片)、LED灯、光敏器件(PD)和无线通信模块(包含蓝牙模组)组成,其检测体系见图2。
1.3.1核心技术病毒气溶胶采集鉴定方法
该检测方式通过生物气溶胶采集机,把空气中的病毒微粒收集在液体中,然后再使用现有的测试液体的检测仪器对所收集的样品溶液进行检测,从而确定环境中是否存在病毒气溶胶。目前,病毒气溶胶技术一般使用液相的气溶胶采集装置和核酸扩增监测装置组合,进行采集和实时监测。
方案特点:轻便,所有设计便携、易操作,为运输和使用提供了极大的便利;高效,方便使用单位即时快速地对微环境空间安全进行检测;安全,具有防交叉感染设计,可有效减少操作人员的感染风险;精准,各环节相互配合,通过高浓度的样品液、高纯度的提取、高灵敏度的检测,保证最终检测结果的高度准确。
方案应用场景广泛,可应用于传染病防治、海关检验、野外即时检验、医学检测试剂、生物应急突发事件等领域,也可用于教学、科研、医疗等机构,以及公共场所的微环境空气安全监管。
1.3.2核心技术方案A-液体撞击器检测方案
气体经过采样头后进入收集管并产生旋风,而气旋中的粒子在回旋流程中通过切向冲击收集液旋流而被收集液俘获。可与冻存管结合使用,将空气中的细颗粒物直接收集在液体中,并结合微生物培养、PCR、LAMP等检验手段,快速测定已采集样本中的微生物。
1.3.3核心技术方案B-旋风式生物气溶胶采样监测方案
本方案是设计一款旋风式生物气溶胶采样器,可与冻存管联合应用,将气体中的细微粒快速收集在液体中的油层上,并结合表面等离子光学传感技术(SPR),以表面分离体共振的探测方法快速分析已采集样本中的微生物。
1.3.4病毒空气监测功能
机器人在巡航区域通过空气富集装置收集区域内空气,并通过芯片每15~20min对所富集空气进行检验,如感应到具有传染性的病毒,则传输至后台,后台通过服务器向区域内负责人员发出预警,以做出防护措施,划定隔离区域及人群,防止病毒外泄扩散。
本模块的监测方法是旋风式生物气溶胶采样,并基于病毒与受体蛋白的特异性结合,结合后蛋白质的质量发生变化,通过监测该变化,判断空气中是否有病毒存在。
1.3.5无人巡检功能
机器人开启后可以在所负责区域内执行无人巡检功能,可设定轨迹路线,也可在机器人完成未知区域建模后,通过后台划定巡检区域,使之在指定区域内执行监视预警等任务。
1.3.6自动消杀功能
机器人在区域内执行巡检任务时,可通过开启雾化消毒模块,对所经过区域进行无人消杀作业,以缓解医护人员压力。
1.3.7物资传送拿取功能
机器人可以灵活更换所搭载配件,在搭载物资传送箱时,通过轨迹设定或区域定点巡检完成物资的传送工作。
1.3.8体温测量功能
机器人能够设置在固定点日常巡检管理中,利用搭载的红外线体温检测模块对路过人员实施体温监测,以替代人工进行体温监测记录的工作。
1.3.9无人机追踪功能
本功能的设定是为了在人流量较大或区域内出现突发情况急需查明时,区域负责人员通过远程遥控无人机从机器人搭载平台上起飞前往查明情况,并可通过区域内广播,判定最优路线疏通人群。
2模块设计
2.1智能无人车载底盘
无人巡检功能主要由智能无人车载底盘执行,采用树莓派主板开发,配合XR-Lidar激光雷达模块、JetsonNano主板驱动等模块完成底盘的设计。该模块由Robot-Eyes720P摄像模块、XR-Lidar激光雷达模块、JetsonNano主板驱动模块、9轴陀螺仪组成,具有SLAM激光雷达构图、室内自动避障及室内定位、物体追踪摄像头巡线、远程控制功能。
2.1.1未知区域的SLAM建图与导航功能
基于SLAM(即时定位与地图构建)的技术开发,需通过键盘或手柄控制机器人移动建图,地图建完后,可以保存到机器人或开发主机,以备机器人导航时使用。地图内容可单击查看,在版图中白色为可通行范围,黑色为障碍物范围,灰色则为未知区域。
除了上述人工手动建图,本项目还支持自动探索建图,在虚拟机上利用“2DNavGoal”按钮发布一个未知区域的位置,机器人会自动规划路线进行自动建图[6]。
2.1.2自主导航功能
在进行探索构图完成后就可以在构建的地图上开始导航。
在虚拟机端标定机器人当前位置和朝向,点击“2DPoseEstimate”按钮,将机器人的大体位置和朝向在地图中标出,利用“2DNavGoal”按钮发布一个目标区域,ROS机器人就可以自行导航和避障到目标地点。
2.2消杀喷雾模块
该模块由储液模块、陶瓷超声波模块、线路主板驱动模块、外置电源模块组成,具有雾化消毒功能。
2.3红外体温监测模块
该模块由MLX90614传感模块、OLED显示模块、nano开发板组成,具有非接触测量体温的功能。
2.4装载模块
该模块由装载底盘、可拆卸装载箱、可拆卸机械臂模块组成,具有物品运输和拿取功能。装载模块可联动后台及手机完成物品选取和传送。
2.5无人机追踪模块
该模块由无人机装载箱、Piromo四轴飞行器、遥控模组组成,具有定高巡航、轨迹飞行和图像传输功能。
2.6语音宣传引导
支持完整的音频方案,包括音频输出和音频输入部分。音频输入为USB摄像头自带麦克风,音频输出为双通道立体声音响,通过3.5寸耳机插头与树莓派连接。
3系统程序设计
设计基本上包含了单片机程序设计与上位机程序设计两个层面。单片机一般由操作系统主程序、底层驱动过程、各功能模块子程序构成,各过程都以单独的C编程语言文件写成。上位机软件主要完成于数据上传的云平台,可利用软件平台管理系统完成开发。主要利用Linux技术和OpenCV的开放计算机系统视觉库开展系统研究。
该控制系统既可以自动操作也可使用遥控或自动控制。机器人的工作除了实现既定的功能(完成人机对话,完成命令等)外,也要对不同感应器所采集的外界信息内容进行分析。控制系统同样可接收来自移动平台、专业控制设备等多种平台的控制指令,以及诸如雷达信号、红外探测信号等各种复杂信息,并通过MDS复合数据链条传输,工作于互联网、移动网络、Wi-Fi信号网络环境。而在平台中,系统可以将机器人连接在一起形成云,操作者可以通过终端设备进行管理。
4结语
本文主要讲述了基于STM32单片机系统的智能消杀机器人设计及实现流程,系统以高性能单片机、病毒监测模块、智能无人车底盘、消杀喷雾模块、红外体温检测模块、装载模块、无人机追踪模块为核心部件,实现了病毒空气监测、无人巡检、自动消杀、物资传送拿取、体温测量、无人机追踪等功能。测试表明,整体操作系统可靠性高、可行性强,可有效解放人力,降低工作人员的感染风险,具有良好的使用前景。
参考文献
[1]尹项迎,蔺飞飞.智能巡检机器人的现状与发展趋势[J].科技视,2020(24):160-162.
[2]黎文娟,马泽洋,曾磊,等.国内外医疗机器人发展现状及趋势[J].机器人产业,2022(6):72-86.
[3]袁鹏.防疫消毒机器人的设计与开发研究[D].济南:山东大学,2021.
[4]张瑜,王新斌,唐倩,等.基于消毒机器人设计与方法的研究[J].电子制作,2021(16):60-61,32.
[5]胡寅,梅月兰.云到端一体化公共通道消毒防疫系统设计与应用[J].工业控制计算机,2021,34(9):99-102.
[6]王然升.自动循迹智能小车的研究与实现[D].青岛:青岛科技大学,2019.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网! 文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/yixuelunwen/78175.html