摘要:针对4DOF车载空调码垛机器人的运动学特性及其工作空间进行分析,以实现其在动态环境中快速、精确地达到预定姿态。采用D-H参数法建立了机器人连杆坐标系,并推导出相关运动学方程,从而完成正运动学和逆运动学的分析。为验证模型的准确性,使用MATLAB软件进行模拟测试,确保机器人在设定关节角度下能够准确实现目标姿态。此外,利用蒙特卡洛算法成功模拟了码垛机器人的实际工作空间,并得到了工作空间的云图和投影图,直观展示其运动能力和可达工作空间。最后,采用五次多项式插值法进行轨迹规划仿真,并与三次多项式插值法的结果进行比较。结果表明,五次多项式插值法生成的运动轨迹更加平滑且无突变,保证电机的平稳运行,能够有效满足车载空调码垛机器人的作业需求。
关键词:码垛机器人,D-H法,轨迹规划仿真,正逆运动学
0引言
随着物流和制造业的快速发展,自动化技术的应用愈加广泛,码垛机器人作为实现高效自动化的重要设备,正在慢慢成为现代生产和仓储体系中重要的一部分[1-2]。它可以快速将物料进行装箱、堆垛,从而提高生产效率,降低人力成本[3-5]。在此环境下,研究码垛机器人的运动学及轨迹规划就显得尤为重要,因为这不仅能够提高生产效率,确保产品质量,还可为其他生产线的自动化改造提供借鉴[6-8]。张程等[9]针对关节轨迹规划法与笛卡尔空间规划法进行对比,验证了关节空间规划法具有更好的平稳性。徐志祥等[10]则在关节空间下采用基于傅里叶级数展开的轨迹规划方法,该方法高效稳定。陈华等[11]
利用五次多项式插值法,对机器人轨迹规划问题展开研究。徐尤南等[12]应用粒子群算法(PSO)对轨迹规划的最优时间求解问题进行了研究,解决了多项式轨迹规划中存在的高阶和运算量大的问题。万琴等[13]利用七次多项式插值算法,得到了更加平滑的运动曲线,减少末端执行器在运行时所受到的冲击。
本文以车载空调码垛机器人为研究对象,通过D-H法[14-16]推导出了该机械臂的正运动学齐次变换矩阵,并通过对齐次变换矩阵中各个元素的比较,推导出机械臂的运动学逆解。此外,利用机器人工具箱[17-19]对机械臂的工作空间进行了仿真,进一步确认了所建立模型的准确性。最后通过五次多项式插值算法[20]对它在关节空间下的任意起始点位置和目标点之间进行轨迹规划仿真实验,结果表明,五次插值多项式算法规划的运动轨迹平滑、无突变,可以很好的满足车载空调码垛机器人的工作需求。
1码垛机器人运动学分析
1.1结构组成
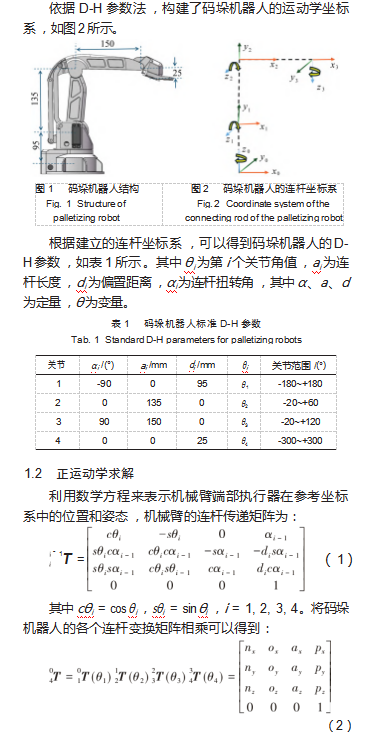
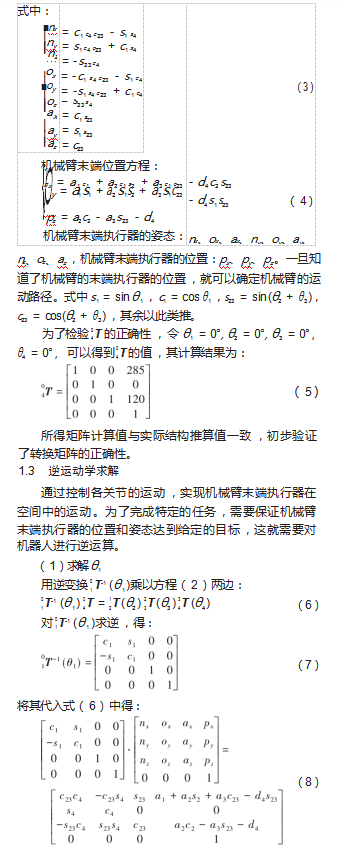
码垛机器人由执行器和腰关节、肩关节、肘关节和腕关节4个旋转关节组成。腰关节为旋转关节,其他关节为弯曲关节。其结构如图1所示。
3结束语
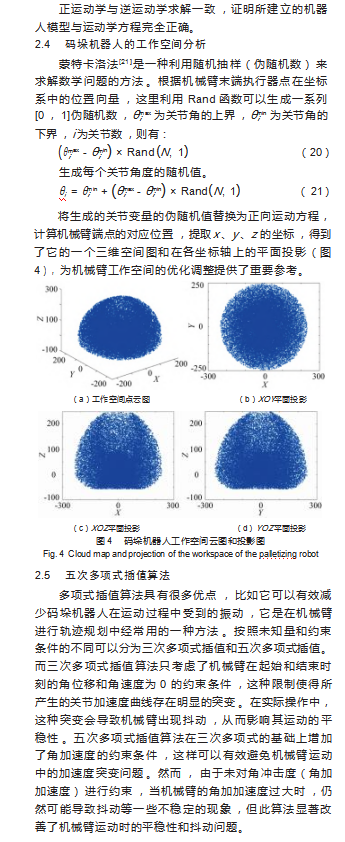
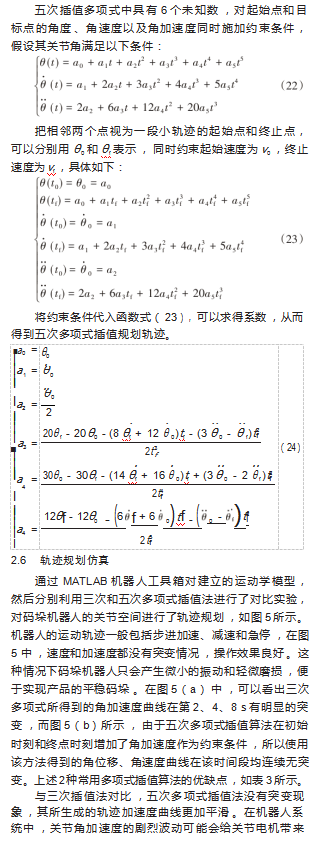
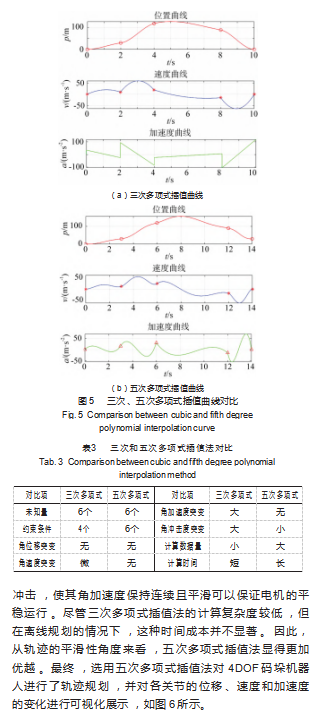
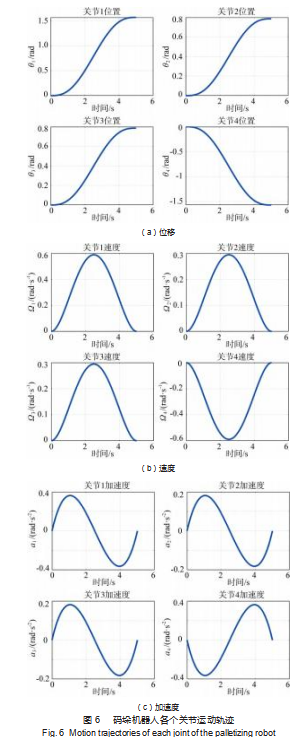
本文以4DOF码垛机器人作为研究对象,首先通过4DOF码垛机器人模型参数,采用了D-H法研究了机械臂与各关节之间的关系,建立机械臂模型,利用运动学方程研究了码垛机器人运动过程的正逆解,并通过使用机器人工具箱对正运动学和逆运动学模型进行了验证。其次利用MATLAB对机器人工作空间进行仿真,采用蒙特卡洛方法来计算工作空间,从而得到了三维工作空间及机械臂在各个坐标平面上的投影图。最后通过对比三次和五次多项式插值算法,发现五次插值算法在运动过程中,各关节角度与时间之间的关系曲线展现出连续和平滑的运动特性,各个关节的角速度和角加速度变化平稳,没有出现突变现象,同时在起始点和终止点的速度与加速度均成功限制为零。这些结果显示,机械臂在实际工作中,各关节和运动部件能够保持平稳运行,从而保证操作的安全性和精确性。
参考文献:
[1]洪从鲁.基于ANSYS的包装物品码垛机器人臂部研究[J].制造业自动化,2023,45(4):71-73.
HONG C L.Research on the arm of packaging goods palletizing robot based on ANSYS[J].Manufacturing Automation,2023,45(4):71-73.
[2]胡春生,魏红星,闫小鹏,等.码垛机器人的研究与应用[J].计算机工程与应用,2022,58(2):57-77.
HU C S,WEI H X,YAN X P,et al.Research and application of palletizing robot[J].Computer Engineering and Applications,2022,58(2):57-77.
[3]季文超.我国工业机器人技术现状与产业化发展战略[J].电子元器件与信息技术,2020,4(8):64-65.
[4]潘知瑶,费叶琦,马竹樵,等.码垛机发展现状及趋势探究[J].机电工程技术,2022,51(9):88-91.
PAN Z Y,FEI Y Q,MA Z Q,et al.Development status and trend of palletizing machine[J].Mechanical&Electrical Engineering Technology,2022,51(9):88-91.
[5]宋启良,梁秀兵,胡振峰,等.现代工业机器人的发展、应用及其绿色修复再制造研究现状[J].材料保护,2020,53(12):95-100.
SONG Q L,LIANG X B,HU Z F,et al.Development and applica⁃tion of modern industrial robots and research status of green re⁃pair and remanufacture[J].Materials Protection,2020,53(12):95-100.
[6]高学恒.4-DOF码垛机器人运动分析及轨迹规划研究[D].天津:天津科技大学,2020.
[7]郭瑞峰,李岩鹤,史世怀.关节型码垛机器人轨迹规划及运动学研究[J].机械设计与制造,2017(1):76-78.
GUO R F,LI Y H,SHI S H.Research on trajectory planning and kinematic analysis of palletizing robot[J].Machinery Design&Manufacture,2017(1):76-78.
[8]罗贵成,胡添嗣.6-DOF机械臂运动学分析和验证[J].现代机械,2023(2):68-73.
LUO G C,HU T S.Kinematics analysis and verification of 6-dof manipulator[J].Modern Machinery,2023(2):68-73.
[9]张程,张卓.码垛机器人运动学分析及关节空间轨迹规划研究[J].组合机床与自动化加工技术,2020(2):19-21.
ZHANG C,ZHANG Z.Kinematics analysis and joint space tra⁃jectory planning of palletizing robot[J].Modular Machine Tool&Automatic Manufacturing Technique,2020(2):19-21.
[10]徐志祥,卢保良,杨傲,等.基于傅里叶级数展开的码垛机器人轨迹规划[J].轻工机械,2024(3):29-36.
XU Z X,LU B L,YANG A,et al.Trajectory planning of palletiz⁃ing robot based on fourier series expansion[J].Light Industry Machinery,2024(3):29-36.
[11]陈华,刘龙,曹彤.介入机器人运动学及轨迹规划研究[J].机电工程,2014,31(6):679-683.
CHEN H,LIU L,CAO T.Study of kinematics and trajectory planning for intervention robot[J].Journal of Mechanical&Elec⁃trical Engineering,2014,31(6):679-683.
[12]徐尤南,刘志强,陈洁.基于粒子群算法的码垛机器人时间轨迹优化研究[J].华东交通大学学报,2021,38(3):75-81.
XU Y N,LIU Z Q,CHEN J.Time trajectory optimization of pal⁃letizing robot based on particle swarm optimization[J].Journal of East China Jiaotong University,2021,38(3):75-81.
[13]万琴,宁顺兴,李智,等.6DOF机械臂运动学分析与轨迹规划仿真[J].制造业自动化,2024,46(4):42-47.
WAN Q,NING S X,LI Z,et al.Kinematics analysis and trajecto⁃ry planning simulation of 6DOF manipulator[J].Manufacturing Automation,2024,46(4):42-47.
[14]周梦,郝同鑫,闰文彬,等.六足仿生机器人结构设计及运动仿真[J].机电工程技术,2024,53(3):172-175.
ZHOU M,HAO T X,RUN W B,et al.Structural design and mo⁃tion simulation of a hexapod biomimetic robot[J].Mechanical&Electrical Engineering Technology,2024,53(3):172-175.
[15]彭光宇,董洪波,马斌.两种DH模型的机器人运动学建模对比研究[J].机械研究与应用,2019,32(6):62-65.
PENG G Y,DONG H B,MA B.Comparative study of robot kine⁃matics modeling based on two DH models[J].Mechanical Re⁃search&Application,2019,32(6):62-65.
[16]吴珂,平学成.基于六轴机器人的运动学分析与轨迹规划[J].组合机床与自动化加工技术,2024(7):17-22.
WU K,PING X C.Kinematic analysis and trajectory planning based on six axis robots[J].Modular Machine Tool&Automatic Manufacturing Technique,2024(7):17-22.
[17]Shan Z,Xu X,Tao Y,et al.A Trajectory Planning and Simula⁃tion Method for Welding Robot[C]//2017:510-515.
[18]Liu J,Huang X,Fang S,et al.Industrial robot path planning for polishing applications[C]//IEEE International Conference on Robotics and Biomimetics(ROBIO),2016.
[19]CHEN C L,HU S S,HE D L,et al.Kinematic analysis and tra⁃jectory planning of j-groove welding robot[J].Transactions of Tianjin University,2012,18(5):350-356.
[20]梁萌.基于五次多项式算法的机器人轨迹规划研究[J].粘接,2020,44(11):70-73.
LIANG M.Research on robot trajectory planning based on quin⁃tic polynomial algorithm[J].Adhesion,2020,44(11):70-73.
[21]李保丰,孙汉旭,贾庆轩,等.基于蒙特卡洛法的空间机器人工作空间计算[J].航天器工程,2011,20(4):79-85.
LI B F,SUN H X,JIA Q X,et al.Calculation of space robot workspace by using monte carlo method[J].Spacecraft Engineer⁃ing,2011,20(4):79-85.
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/82474.html