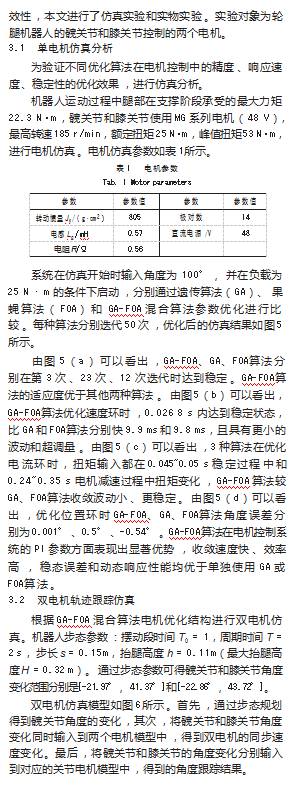
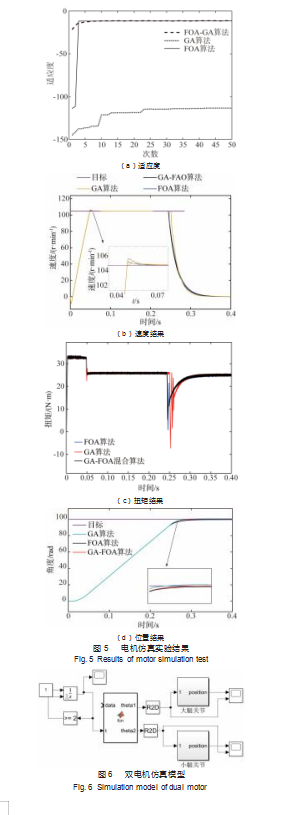
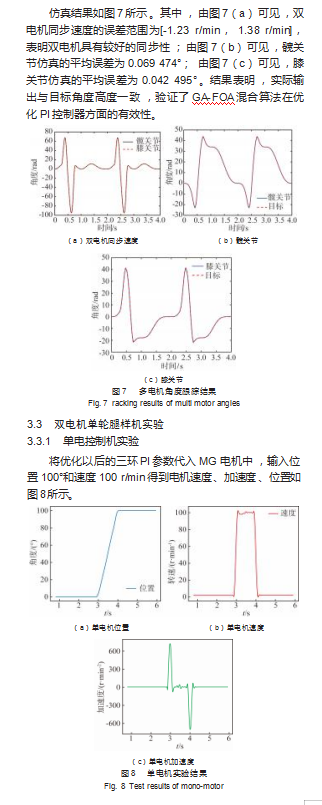
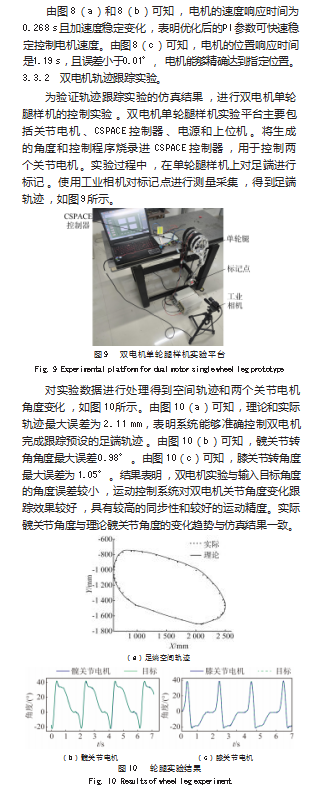
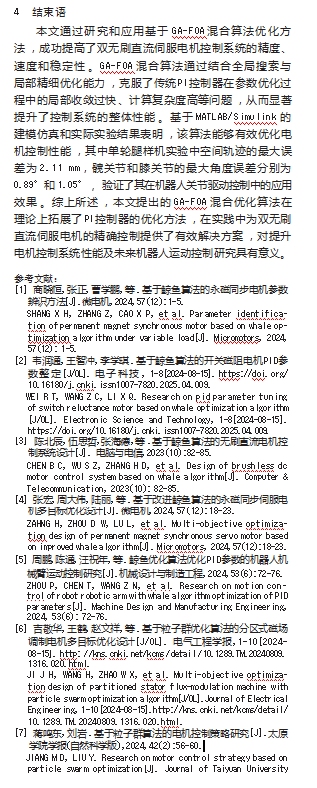
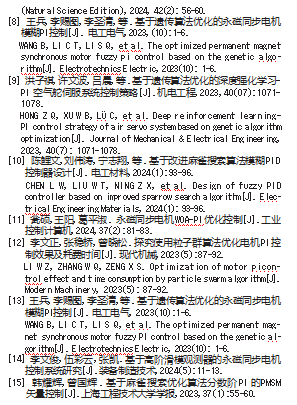
摘要:针对双无刷直流伺服电控制系统在机器人关节控制应用中精度低、响应速度慢、鲁棒性差的不足,拟采取遗传和果蝇混合(GA-FOA)算法PI参数优化方法,以提高双电机控制系统的控制精度、响应速度、鲁棒性。建立无刷直流伺服电机三闭环控制仿真模型,以CSPACE为主控器建立控制系统,结合上位机、霍尔传感器设计双无刷直流伺服电机控制系统。通过遗传和果蝇混合算法PI参数优化方法,优化无刷直流伺服电机矢量控制中的三环PI控制器参数。仿真结果表明,GA-FOA混合算法优化速度环时比GA和FOA算法分别快9.9 ms和9.8 ms,且具有更小的波动和超调量,优化电流环时,响应时间快7.0 ms和5.9 ms,波动小更稳定,优化位置环时,收敛快且未出现超调量,轨迹跟踪优化后的电机模型在髋关节和膝关节的平均跟踪误差分别为0.069 474°和0.042 495°。双电机单轮腿样机实验中,实验空间轨迹和理论空间轨迹误差为[0.28 mm,2.11 mm],空间轨迹吻合,结果表明GA-FOA混合算法在双电机单腿样机实验上对电机的精度、响应速度、鲁棒性具有意义。
关键词:无刷直流伺服电机,三环PI控制,遗传混合算法,矢量控制,仿真建模
0引言
随着机器人技术的快速发展,无刷直流伺服电机已成为机器人和机械臂关节驱动的关键组件,广泛应用于工业自动化、医疗设备和智能制造等多个领域。这些系统的运动控制精度直接影响其在复杂环境中执行任务的能力。然而,传统的比例积分(Proportion Integral,PI)控制器在复杂工况下往往面临着控制精度低、响应速度慢以及稳定性差等问题,这些问题显著限制了机器人和机械臂在高精度任务中的应用和性能表现。因此,如何优化PI控制器的参数以提升控制系统的性能,已成为亟待解决的关键技术问题。
针对这一挑战,国内外学者提出了多种优化方法,如鲸鱼优化算法(Whale Optimization Algorithm,WOA)[1-5]、粒子群优化算法(Particle Swarm Optimization,PSO)[6-7]、遗传算法(Genetic Algorithm,GA)[8-9]和改进麻雀算法[10]等。这些方法在提升系统性能方面取得了一定成效。瓮硕等[11]通过开发基于鲸鱼优化算法的永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)PI控制器,有效提升了控制系统的响应速度和鲁棒性。李文正等[12]用粒子群算法优化电机PI控制,发现静态负荷下优化参数在动态负荷下有效,仿真时间减少50%,提高了仿真效率。王兵[13]、李文俊等[14]利用遗传算法优化永磁同步电机的模糊PI控制,显著提升了控制系统的响应速度、稳定性和抗干扰能力。韩耀辉等[15]利用麻雀搜索算法优化永磁同步电机的分数阶PI控制器,显著提高了系统鲁棒性和动态响应性能,超调量减少,调节时间缩短,抗干扰能力和控制精度得到提高。杨洪涛等[16]利用灰狼算法优化模糊PI控制永磁同步电机,提高了系统的响应速度、抗干扰能力和运行稳定性。郭文韬等[17]通过模糊PID算法优化无刷直流电机控制,实现了更快的响应速度、更小的超调量和更好的动态性能,相比传统PID控制,提升了系统的控制精度和鲁棒性。
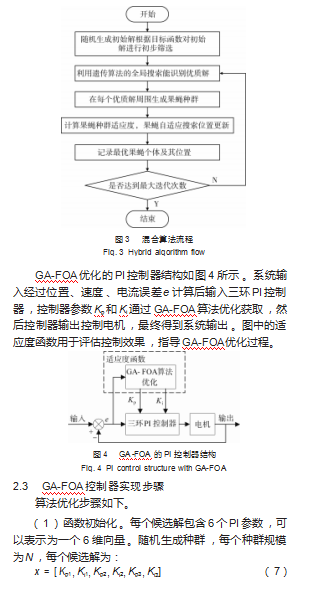
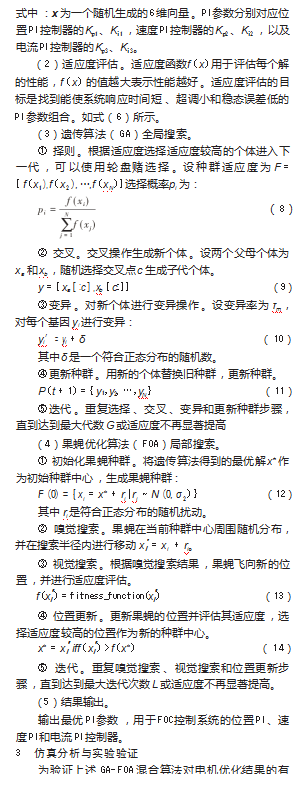
本文提出了一种基于遗传算法(GA)与果蝇优化算法(Fruit-fly Optimization Algorithm,FOA)的混合优化方法。该方法通过结合GA的全局搜索能力和FOA的局部搜索精度,旨在加快优化速度并避免局部收敛过快的问题,从而实现更加有效的PI控制器参数优化。本文将该混合算法应用于双无刷直流伺服电机的位置环、速度环和电流环的PI参数优化中,以实现对系统的精准、快速和稳定控制。
1电机模型与双电机控制系统
为实现对电机PI控制参数优化需要对电机进行建模仿真,并建立双电机控制系统,实现双电机精确、快速、稳定控制。
1.1电机模型
为有效进行PI参数的优化,需要对电机控制系统进行建模。
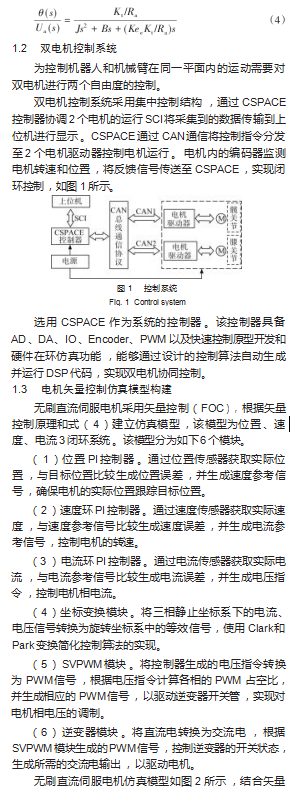
无刷直流伺服电机的物理模型主要包括电气与机械部分。电气部分的电枢电路包括电枢输入电压u a、电枢电流ia、电枢电阻Ra、电枢电感La及感应电动势ue。机械部分包括电机输出转角θ、电磁转矩τ、转动惯量J,以及黏性阻尼系数B。
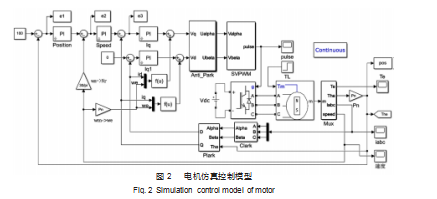
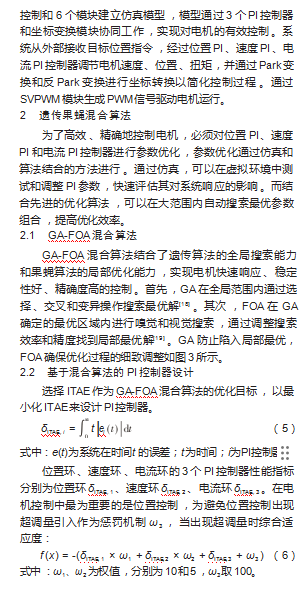
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/82153.html