摘要:时滞混沌系统的同步问题一直是混沌研究领域的热点和难点。这类系统由于其固有的复杂性和非线性特性,往往伴随着非匹配不确定性,从而使其同步控制过程变得复杂。提出了一类不确定时滞混沌系统的模糊滑模同步方法。首先,利用了T-S模糊模型对非线性混沌系统进行描述,然后基于线性矩阵不等式方法,给出了一个与时滞无关的滑模面存在的充分条件。在此基础上,设计了模糊滑模控制器。该控制器充分利用了T-S模糊模型的局部线性特性和滑模控制的鲁棒性,实现了对时滞混沌系统的有效同步控制。为了验证该方法的有效性,进行了仿真实验。实验结果表明,该方法能够实现对含有非匹配不确定性的时滞混沌系统的有效同步控制。与传统的控制方法相比,该方法具有更强的鲁棒性和适应性,能够更好地应对系统中的不确定性因素。
关键词:时滞混沌系统,同步,T-S模糊模型,滑模控制
0引言
自20世纪90年代以来,Pecora和Carroll[1-2]提出的驱动-响应同步方法为混沌理论领域的研究奠定了重要基础,引起了学术界广泛关注。这种方法不仅为保密通信、信息科学等领域的研究开辟了新路径,同时也为在生物、医学以及工程等多个领域的应用提供理论支撑。
随着研究的持续深化,人们提出了多种混沌同步方法,这些方法各具特色,互相补充,共同推动了混沌同步理论的发展。基于状态观测器的同步法[3-5]通过观测系统的状态信息,实现对混沌系统的精确控制;模糊控制同步法[6-8]则利用模糊逻辑理论,对混沌系统进行模糊建模和控制;自适应同步法[9-11]则根据系统的实时状态,自适应地调整控制参数,实现混沌系统的同步;而反馈控制同步法[12-15]则通过引入反馈机制,实现对混沌系统的有效调控。
然而,上述这些混沌同步方法的研究主要集中在非时滞系统领域。在实际的生产和生活中,时滞现象是普遍存在的。时滞混沌系统在密码学、信号处理、通信领域等多个领域都有着非常广泛的应用。因此,研究时滞混沌系统的同步问题具有非常重要的实际意义。
自Mackey和Glass首次在时滞系统中发现混沌现象以来,时滞混沌系统便激起学术界广泛的兴趣并推动其进行深入研究。文献[16]针对一类具有时滞特性的混沌系统,提出了基于T-S模糊模型的H∞控制方法,通过设计控制器,构建相应的线性矩阵不等式,并求解不等式,得到系统控制器的增益,进行了数值仿真验证了方法的有效性。文献[17]针对多时滞混沌系统中存在的外部扰动问题,提出了一种具有鲁棒性能的输出反馈控制策略。该方法通过引入鲁棒控制理论,设计了一种能够抑制外部扰动的输出反馈控制器。通过该控制器的应用,多时滞混沌系统能够实现同步,并且在存在外部扰动的情况下仍能保持稳定的同步状态。文献[18]借助间歇性线性状态反馈控制及脉冲控制手段,并结合Lyapunov函数及其Dini导数的相关性质,探讨了一类具有时滞特性的混沌系统及其从属系统误差系统的控制与同步策略问题。文献[19]探讨一类具有时滞特性的混沌神经网络同步控制问题。创新性地融合了自适应控制技术与参数辨识方法,通过分析主从系统之间的误差信号,利用自适应律对系统参数进行了精确辨识。在此基础上,进一步设计了自适应同步控制器,实现了两个参数未知且具有非线性延迟扰动的时滞混沌神经网络系统的同步。
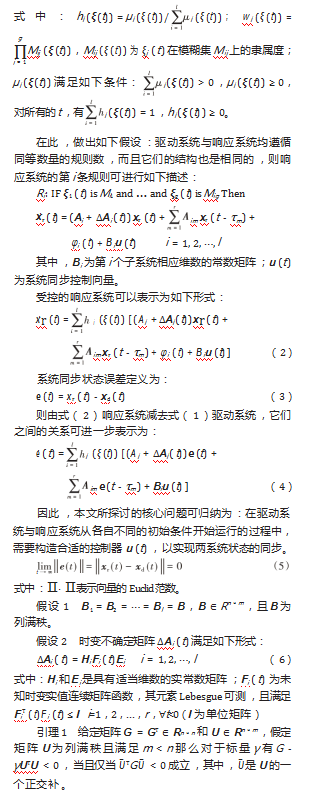
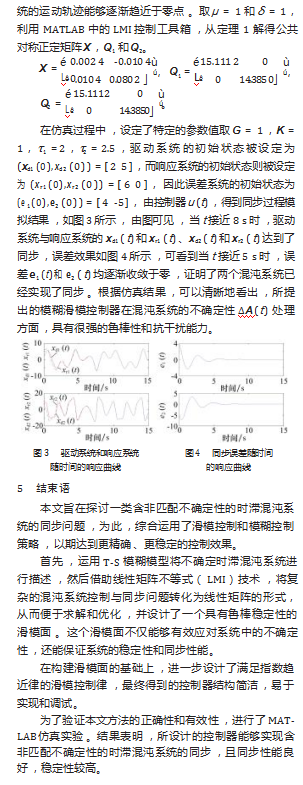
本文研究了一类含有非匹配不确定性的多时滞混沌系统的同步问题。首先用T-S模糊动态模型对时滞混沌系统进行建模,然后基于Lyapunov稳定性理论和线性矩阵不等式,推导系统滑动模态渐近稳定的条件,并设计满足指数趋近律的模糊滑模控制器,确保系统状态快速且稳定地沿滑模面运动。最后,MATLAB仿真结果表明所提出的同步控制方法,能够有效促使具有不确定时滞的混沌系统迅速实现全局同步。
1时滞混沌系统的T-S模糊模型描述
由于混沌系统为非线性系统,无法完全通过全局线性系统进行描述。可以通过一系列局部线性系统的组合,对其有效地近似表达。
结合T-S模糊模型与时滞混沌系统的特性,对不确定时滞混沌系统进行描述,规则i可进行如下描述:
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/81395.html