摘要:目前对于水葫芦防治,我国大部分大型水域已有相对完善的防治技术与成熟设备,但是各类小型水域仍以人工清捞为主。为此,基于小型水域与水葫芦的特性,研发了一种水葫芦小型清捞机作为优于人工清捞的自动化解决方案。清捞机由打捞系统、切断分离系统、动力系统与电路控制系统4部分组成。打捞系统由无刷电机驱动的圆锯片、直流电机驱动的清捞轮与传送带组成,考虑运动过程中的特殊位置,建立了水葫芦清捞过程中的运动学模型以使水葫芦能顺利进入舱体;切断分离装置由双轴丝杆组成,通过静载荷与压杆稳定性得出丝杆的参数要求,通过总扭矩得出步进电机的参数要求。之后通过SolidWorks软件对打捞转轮进行静力学分析与优化设计以确保该关键零件的工作强度。搭建后进行实机测试,结果表明这种利用遥控操控的清捞机,操作简单省力、工作可靠,作业生产效率不低于67.5 m2/min,能够实现在小型水域连续作业,在节省人力物力的同时,极大提高了清捞作业效率与素质要求。
关键词:自动化,水葫芦清捞机,遥控控制,SolidWorks
0引言
水葫芦的适应性极强、生长速度很快、蔓延速度惊人,过度繁殖后难以有效控制,是国际公认的十大入侵恶性杂草之一[1]。中国南部沿海地区水热条件优良,缺少水葫芦的有效天敌,因此水葫芦一旦野生,很难人为控制,从而造成灾害[2]。水葫芦的危害包括水化学和物理性质的退化,阻碍捕鱼、发电和运输,并在附近人群中引起疾病[3-4]。水葫芦还以破坏水生生态系统和栖息地而闻名,主要对水质产生不利影响,导致水生生物患热带疾病,威胁生物多样性并严重扰动地区生态学[5-8]。
目前水葫芦的防治技术主要包括物理防治、生物防治、化学防治以及综合防治等[9]。其中物理防治中的打捞是目前最有效并且对环境最安全的控制方法,可快速、有效遏制水葫芦疯长的同时收获水葫芦以资源化[10-13]。一般采用保洁船或挖掘机将水葫芦打捞至岸边,然后进行脱水装车、集中填埋[14-15]。现有市面上成熟的机械清捞船有芬兰RS-Planering公司的水生植物清捞船RS2000、德国Berky公司的6520型清捞船、荷兰Conver公司的MC101型清捞船[16]。但是上述挖掘机与大型清捞船在偏远乡村与小型水域因运输成本、吃水深度与宽度等并不能很好地普及与使用。为了适应小型水域的使用,结合现有无人船遥控系统方案[17-19]与仍仅为功能原型的全自动水面垃圾清捞无人船[20-21]的研究方向,以先识别再打捞的技术思路实现机械清捞船的无人化。因此本文设计一种半自动化遥控式的小型清捞船,以整机轻简化、小型化与操作简单化为设计原则,在使用过程中能够极大程度地减少人工的作业强度与素质要求。
1工作原理
由于本文主要研究小型水域的清捞,因此将采用《海水健康养殖与水产品质量安全》[22]一书中关于池塘与排水渠的研究结果作为参考,即平均株高在47.4~49.4 cm,最高达75 cm,生长密度为58~76株/m2,生物量为26.2~32.3 kg/m2。由于水葫芦的根部发达,占有其生物量的相当分量,且通常多株水葫芦根部会相互缠绕成团,在设计中需要考虑此特性。
本文所设计的小型清捞机主要目标是成为一种优于人工清捞的自动化解决方案,主要使用场景为各类小型水域、典型的有开阔的浅水域与复杂弯曲水域。因此提出清捞机能够在自动化清捞水葫芦的同时,拥有不低于人工清捞的工作效率。
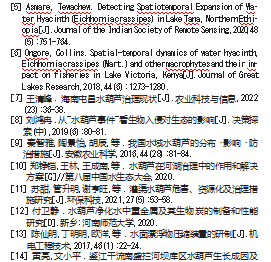
本文据此设计了一款小型清捞机,割幅780 mm,工作效率67.5 m2/min以上。
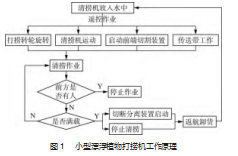
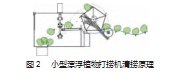
小型清捞机的工作原理如图1所示,清捞原理如图2所示。将清捞机从特制的推车上搬至水中后,便可以遥控开始作业。工作时,打捞机由一组对称的推进器驱动运动,首先由高速圆锯片将片状分布漂浮植物切割成适宜打捞的带状。随船体前进,拨禾轮将漂浮植物打捞进入舱体的传动带上。漂浮植物由传送带经过切断装置,输送至舱体内部以实现漂浮植物的仓储。当船体检测满载时,传送装置停止工作并用切割装置将漂浮植物切断以返回。整机作业会在红外感应模块检测前方有人时停止。
2关键部件分析计算与设计
2.1打捞装置与输送装置
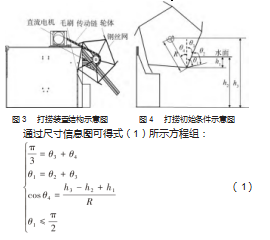
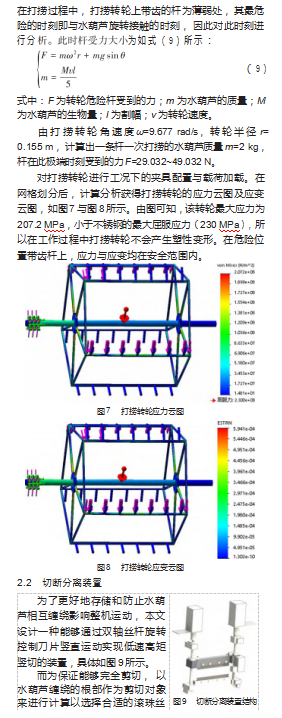
打捞装置主要负责将前端切割后的漂浮植物从水面运输至输送装置上。如图3所示的打捞装置通过链传动驱动转轮旋转,转轮表面有钢丝网覆盖。漂浮植物在转轮上的齿经过水面时被*起,并在轮旋转一定角度后分离落至传送带上以实现漂浮植物自水面的打捞。在作业时主要会遇到两种工况,一种是三四株缠绕成块的情况,一种是大量缠绕成条的情况。对于第一种的工况,漂浮植物往往会被夹在轮齿与铁丝网之间,并在旋转至一定角度后被抛出。因此需要调节轮齿与铁丝网的倾角,使装置能够夹住目标的同时,能够使漂浮植物抛至传动带上。对于第二种工况,为了能够斜抛至传送带或舱室内,需要满足两个条件,一是夹取的漂浮植物能够脱离,二是脱离后能够斜抛至传送带上或储存舱体。
对于第一种工况,为了能够夹住目标而不至于掉落,当轮齿接触至漂浮植物根部,即距离水面h1时,仅需齿与竖直向上方向夹角非钝角即可。所以根据打捞装置结构得到图4所示的转轮的尺寸信息图。
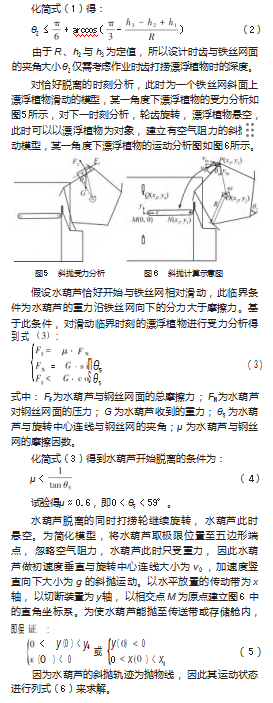
图3打捞装置结构示意图图4打捞初始条件示意图通过尺寸信息图可得式(1)所示方程组:
式中:θ1为齿与竖直向上方向的夹角大小;θ2为齿与铁丝网面的夹角大小;θ3为齿根至旋转中心连线与竖直向上方向的夹角大小;θ4为铁丝网面与竖直向上方向的夹角大小;h1为任一时刻齿与水面的竖直距离;h2为水面与船体底面的距离;h3为旋转中心到船体底面的距离;R为旋转中心到船体底面的距离。
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/81223.html