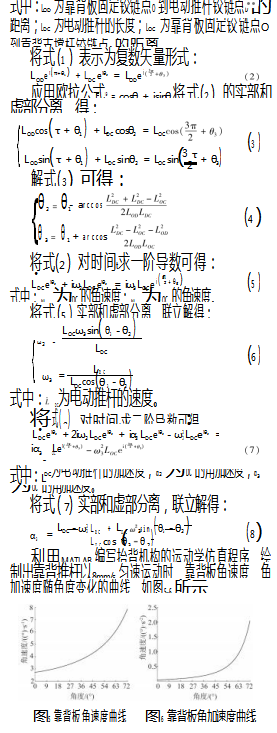
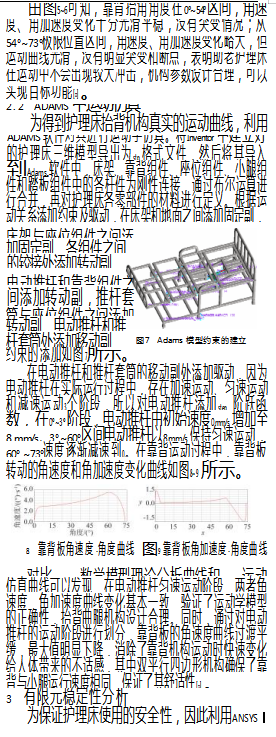
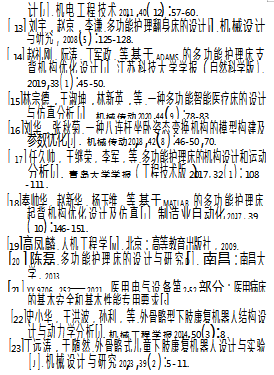
摘要:针对具有自理能力的独居老人上下床困难的问题,设计了一款具有一键式抬背屈腿功能的助老护理床。设计了一种双平行四边形机构的联动结构,并应用解析法与欧拉公式得出了靠背机构的角速度和角加速度与电动推杆的运动关系,利用MATLAB绘制了靠背机构在电动推杆以8 mm/s匀速运动时的速度趋势,即靠背抬角角度在0°~54°区间,角速度、角加速度变化十分光滑平稳,没有突变情况;从54°~73°极限位置区间,变化略大,但运动曲线光滑,没有明显突变和断点,表明助老护理床没有较大冲击。在Adams中进行了运动验证,得出其启动、稳定运行、停止时均无突变情况。并在ANSYS中进行了安全稳定性分析,得出其Q235结构下厚度结构强度合理。最后实物样机试验结构验证老人床完全可以轻松躺立切换,为今后进一步开发打下了基础。
关键词:护理床,平行四边形机构,角速度,运动学仿真,有限元分析
0引言
近年来,我国人口老龄化情况日益严峻,“空巢家庭”是老龄化进程中较为突出的社会现象,预计2030年空巢老人家庭比例或将增加到90%[1],是当今乃至今后政府和社会都必须高度重视的问题。随着年龄的增长,老年人的肌肉力量减弱、行动迟缓[2],为提高老龄人群的生活质量,多种助老机械应运而生,尤其是为护理床的发展提供了巨大的市场前景[3-4]。
国外对护理床的研究起步较早,护理床的发展已趋向智能化、人性化,在康复机器人方面也有研究[5-10],但其操作复杂,价格昂贵,并未在国内得到广泛应用。目前,国内也有许多学者致力于护理床的研究,韩书葵等[11]设计的多功能护理床通过一个电机加锥齿轮传动机构和丝杠机构的搭配使用,实现支背、曲腿及侧翻功能。
刘国田等[12]采用弹簧和连杆等方式设计一款姿态可调整、轴距可变的护理轮椅床。刘宇等[13]设计的多功能护理翻身床采用了两套电机加丝杠机构分别实现支背和曲腿功能,通过电机和两个电磁铁装置实现侧翻功能。
事实上,对于部分具有自理能力的独居老人或许只需要辅助起床和平躺功能,并不需要其他辅助功能。基于此,参考各类多功能护理床的设计方法[14-18],设计了一种适用于独居老人的助老护理床。该助老护理床使用单动力源,通过平面连杆机构的联动,可实现支背、曲腿、踏脚3个动作同步完成,且操作简单,能让老年人在坐-卧过程中更方便、平稳、安全。
1结构设计及工作原理
1.1总体设计
本文的助老单人床主要由床架、床垫板、抬背曲腿机构以及护栏机构组成。为实现助老护理床的功能,将床板分为了4个部分,如图1所示。A为靠背垫板、B为座位垫板、C为小腿垫板、D为脚踏板,4块板的尺寸大小是参照市面上护理床的尺寸确定的,最终助老单人床的整体尺寸为2080 mm(长)×1 000 mm(宽)×650 mm(高)。通过查询有关人机工程学[19]资料发现,人体坐立时背部最舒适的角度为80°。考虑到本产品面向老年人的,拟定靠背的角度调节范围为0°~73°,既可以适应不同老年人的需要,同时也尽可能保护老人的腰及脊椎,缓解老年人腰酸背痛的症状。
1.2方案选择
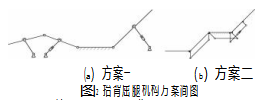
由于此产品主要面向的是老年人,其对事物的反应及理解能力较差,因此在设计助老护理床的机构方案时,首先要保证护理床的安全性,防止意外发生,进行抬背屈腿动作时应保持运动平缓舒适,其次,要求产品的学习时间短,操作简单,方便老年人使用。现提出以下两种机构方案,如图2所示。如图2(a)所示抬背屈腿机构,该机构有两个电动推杆,分别驱动靠背机构和屈腿机构,该平面机构具有8个活动构件,通过11个低副相互运动,自由度F=3×8-2×11=2,原动件个数等于机构自由度数,具有确定运动。该机构结构简单,但需要较大床下空间,且要单独控制,因此不选用该机构。如图2(b)所示,该机构有一个电动推杆作为驱动,具有7个活动构件,通过10个低副相互运动,自由度F=3×7-2×10=1,原动件个数等于机构自由度数,具有确定运动。该机构操控简单,使用一个电动推杆,可同时实现抬背屈腿的动作,方便老年人使用,故选用此方案。
具体结构如图3所示。靠背组件、座位组件、大腿组件和小腿组件依次排列连接,座位组件包括座位板、电动推杆安装杆和座位板支撑杆,座位板与床架焊接固定,电动推杆两端分别与座位组件的推杆安装杆Ⅰ和靠背组件的推杆安装杆Ⅱ铰接,靠背板支撑杆呈90°焊接在靠背板上,小腿连杆位于座位板下方且与座位板平行,其一端铰接靠背板支撑杆,另一端与垂直焊接在小腿板上的小腿支撑杆铰接。座位板与小腿连杆等长,靠背支撑杆与小腿支撑杆等长,四杆件合围连接组成可变形的平行四边形机构一。座位板支撑杆呈90°固定在座位板下方,与踏板连杆的一端连接,踏板连杆位于小腿板下方,与小腿板平行等长,踏板连杆的另一端和踏板支撑杆通过销轴连接,踏板支撑杆垂直于脚踏板固定连接组成踏板支架,脚踏板支撑杆与座位板支撑杆平行且相等,形成平行四边形机构二。
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/81221.html