摘要:随着人工智能和物联网技术的发展,家庭智能清洁机器人逐渐成为家庭助手的重要组成部分。首先阐述了捡拾机器人的应用背景和研究意义,详细介绍了机器人的系统架构和关键技术。在系统架构方面,采用树莓派作为主控制器,利用计算机视觉技术进行物体识别,并结合SLAM技术实现自主导航。在关键技术方面,采用计算机视觉识别和分类家庭物品,SLAM技术则支持机器人在未知环境中的实时定位和路径规划。对捡拾机器人的机械结构进行了优化设计,使其能够适应不同形状和大小的物体,并通过“扫入”方式提升捡拾效率。此外,还采用了视觉传感器和导航技术,实现了实时地图构建和更新。本研究为基于机器人实践竞赛的项目式教学,展示了一种创新的机器人设计思路,为家庭机器人领域提供了新的设计方向,并拓展了机器人的应用范围。通过实验验证,捡拾机器人能够在多种家庭环境中稳定工作,展现出较高的准确性和可靠性,相较于传统清洁工具,具有显著的创新性和实用性。
关键词:家用机器人,多功能捡拾,计算机视觉,项目式教学
0引言
随着科技的不断进步,人工智能与物联网技术日益成为家庭自动化与智能化领域的核心驱动力[1]。在这一背景下,家庭服务机器人作为重要的智能设备,其对于复杂家庭工作环境的适应性成为了研究的焦点。特别是定位和建图技术,作为移动位置感知设备自主管理的基石[2-4],其重要性不言而喻。然而,现有的家庭智能清洁机器人在物体识别、分类和捡拾方面仍存在局限性,同时其自主导航能力在复杂环境中也需进一步提升。因此,本研究旨在通过结合计算机视觉和SLAM技术,设计并实现一款新型的家用多功能捡拾机器人,以解决上述问题。
目前,关于家庭服务机器人的研究已经取得了一定的进展[5-6],特别是在定位和导航技术方面[7-8]。其中,SLAM技术作为实现机器人自主定位与导航的关键技术,主要分为激光SLAM[9]和视觉SLAM[10]两种方案。激光SLAM以其高精度在特定场景中表现出色,而视觉SLAM则因成本优势和广泛的适用性受到关注。然而,现有的研究仍未能完美解决家庭服务机器人在复杂环境下的稳定性问题。
此外,随着人力资源成本的上升和计算机硬件成本的下降,机器人已经广泛应用于工业生产、医疗等领域,并逐渐渗透到家庭服务中[11-12]。这一趋势不仅展示了机器人的广阔应用前景,也对机器人的性能提出了更高要求[13-15]。特别是在家庭服务领域,一款能够识别、分类和捡拾各种物品的机器人将极大地提高生活质量和服务水平。
在此背景下,本研究结合计算机视觉和SLAM技术,旨在设计一款具有物体识别、分类和捡拾功能的家用机器人。通过计算机视觉技术实现对地面物品的精准识别和分类,同时利用SLAM技术实现机器人在未知环境中的实时定位和路径规划。这一创新设计不仅有助于推动家庭清洁机器人的技术进步,实现清洁工作的自动化和智能化,还将促进人工智能、机械工程、控制理论等多个学科的交叉融合。
本研究预期将实现一款能够在全区域范围内进行物体捡拾的家用多功能捡拾机器人,显著提高清洁效率和质量,同时降低成本,增强产品的市场竞争力。通过实验验证,期望该机器人在多种家庭环境中展现出高准确性和可靠性,为家庭机器人领域提供一种新的设计思路,并拓展机器人的应用范围,使科技更好地服务于人们的日常生活。
1设计原理
通过学习已有技术,改良机械结构,创新控制方法,并不断调试优化,实现一个自动化和智能化的家用多功能捡拾机器人。
学习并创新已有捡拾机器人的机械结构与控制方法,并且基于多功能捡拾的需求,创新捡拾的“扫入”方式,与已有的计算机技术相结合。主要从机械结构设计、控制方法设计、产品调试运行3个方面开展研究。
(1)机械结构方面,前期进行已有捡拾机器人的机械结构调研,分析各机械结构的适用场合及局限性,根据产品需要对设计方案进行改良。设计具有可调节张力的捡拾装置,适应不同重量和形状的物体。采用紧凑型设计,使机器人能够在各种家庭环境中轻松移动和操作。设计灵活的捡拾装置,可根据不同物体的大小和形状进行调整。项目采用“扫入”方式,提升对待清理物体形状体积的包容度。
(2)控制方法方面,采用树莓派为主控,利用计算机视觉图像识别技术实现对物体方向和位置的检测;通过无监督学习方法对物体进行多物体识别、分类及记忆功能。达到视野内多种地面物品同时存在的场景下的多功能捡拾目标;采用视觉SLAM(同时定位与地图构建)技术;利用视觉传感器或组合导航技术,实现实时地图构建与更新;实现捡拾机器人的自我定位和路线规划,实现全区域的物体捡拾。
(3)产品调试运行方面,基于团队在机械结构和控制方法方面的调研、设计与实践,实现机械结构与控制方法的交互,如捡拾机器人的快速移动、传感器的信号传输与数据处理、捡拾方位与距离设置等,运用研究的成果完成一件完整产品的创新设计,应用于家庭机器人创新产品开发,补充目前机器人性能的缺失,提供一种便利生活的方式。
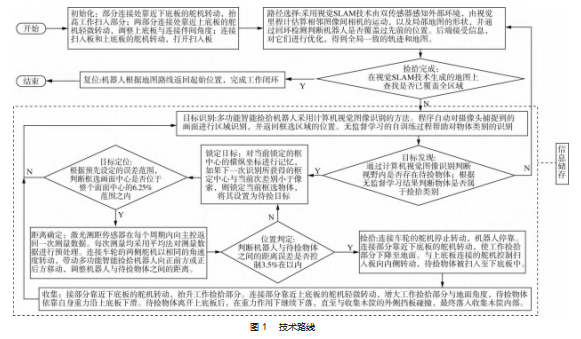
技术控制路线如图1所示,主要实现的功能为:
(1)实现机器人的模型设计、基础行进、捡拾功能,保障识别精准度高;
(2)完成无监督深度学习,实现对目标物体的分类识别;
(3)实现SLAM的定位算法,使得小车可以自主规划路径。
依据上述技术路线开发出一款高性能的家用多功能捡拾机器人,不仅能够提高家庭清洁的效率,还能够为用户提供更加便捷和智能的生活体验。此外,这款机器人的设计原理和技术控制路线的优化也将为家庭服务机器人的未来发展提供新的思路和方向。
2机械设计
2.1结构
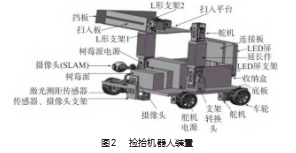
通过对已有捡拾机器人的机械结构进行调研和分析,根据产品需要对设计方案进行改良。设计具有可调节张力的捡拾装置,适应不同质量和形状的物体。采用紧凑型设计,使机器人能够在各种家庭环境中轻松移动和操作。设计灵活的捡拾装置,可根据不同物体的大小和形状进行调整。项目采用“扫入”方式,提升对待清理物体形状体积的包容度如图2所示。
2.2捡拾装置
在机械结构设计方面,通过对现有捡拾机器人的深入研究,结合产品需求,进行了创新设计。捡拾装置具备可调节张力,能够适应不同质量和形状的物体,确保捡拾过程的稳定性和安全性。此外,紧凑型设计使得机器人能够在家庭环境中轻松穿行,而灵活的捡拾装置则可以根据物体的大小和形状进行调整,提高了机器人的适用性和效率。
为了实现对不同体积和质量的物品的有效捡拾,设计了一种可调节张力的捡拾装置。该装置可以根据物品的大小和重量调整张力,以保证在捡拾过程中既能稳固抓取物品,又不会因为过度用力而损坏物品。捡拾装置采用紧凑型设计,便于机器人在有限的空间内进行灵活操作。
2.3扫入式捡拾
本项目采用“扫入”方式进行捡拾,提升对待清理物体形状体积的包容度。扫入式捡拾装置由一组可旋转的扫帚和吸尘器组成,当机器人向物品移动时,扫帚会将其包围并将其“扫入”捡拾装置中。这种设计不仅提高了捡拾成功率,还能够处理各种形状和大小的物品,从而增强了机器人的实用性。
2.4捡拾装置调整
为了适应不同物品的大小和形状,捡拾装置设计为可调节结构。用户可以根据需要调整捡拾装置的形状和位置,以适应不同物品的捡拾。这种设计提高了捡拾装置的通用性,使其能够应对各种复杂的捡拾场景。
2.5机器人移动
为了实现机器人在家庭环境中的灵活移动和操作,对机器人的移动结构进行了精心设计。机器人采用紧凑型轮式设计,适应不同地形和空间限制。同时,机器人还具备快速移动功能,能够在捡拾过程中迅速调整位置,从而提高了工作效率和清洁覆盖范围。
2.6传感器集成
为了实现对捡拾过程中物品的精准定位和操作,本项目在机器人上集成了多种传感器,如视觉传感器、红外传感器等。这些传感器能够实时监测机器人周围的环境和物品信息,为捡拾装置的精确控制提供数据支持。通过这些传感器的集成,机器人能够更加智能地识别和捡拾物品。
2.7机械结构与控制方法交互
机械结构与控制方法之间进行了紧密的交互设计。捡拾装置、移动装置和传感器等机械结构部分与控制算法、传感器数据处理等软件部分紧密结合,实现了对捡拾过程的精确控制。例如,在捡拾过程中,控制器会根据传感器提供的数据调整捡拾装置的张力和位置,以保证物品的稳定捡拾。
通过以上几方面的设计,成功实现了一种基于计算机视觉和SLAM技术的家用多功能捡拾机器人。该机器人具备了对各种体积和质量的物品进行识别、分类、捡拾与定位的能力,为家庭机器人领域的发展提供了新的思路。
3控制系统设计
3.1控制方法
采用树莓派作为主控,利用计算机视觉图像识别技术实现对物体方向和位置的检测;通过无监督学习方法对物体进行多物体识别、分类及记忆功能。采用视觉SLAM技术,利用视觉传感器或组合导航技术,实现实时地图构建与更新;实现捡拾机器人的自我定位和路线规划,实现全区域的物体捡拾。机器人工作流程如图3所示。
3.2产品调试运行
在机械结构和控制方法方面的调研、设计与实践,实现机械结构与控制方法的交互,如捡拾机器人的快速移动、传感器的信号传输与数据处理、捡拾方位与距离设置等。运用研究的成果完成一件完整产品的创新设计,应用于家庭机器人创新产品开发,补充目前机器人性能的缺失,提供一种便利生活的方式。
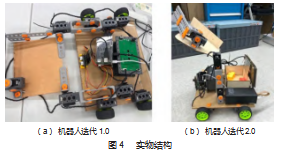
在实物搭建中,大部分零件采用的是博创尚和套件,上下底板由激光切割而成,摄像头支架通过3D打印制成,收纳盒则通过激光切割的木板以榫卯结构连接而成。各零件之间通过套件中的连接件和螺钉进行连接。实物结构如图4所示。
3.3方向确定
采用OpenCV颜色识别的方法。首先在程序将图像从RGB颜色空间转换为HSV(色相、饱和度、亮度)颜色空间。这是因为HSV颜色空间能更好地分离和表示颜色信息。在HSV空间中,色相(H)用角度度量,范围从0°到360°,红色为0°,红绿蓝间隔120°;饱和度(S)的范围是0到1,代表光谱色在颜色中所占的比例,0时颜色只有灰度,1时颜色为纯光谱色;亮度(V)的范围也是0到1,代表颜色的明亮程度,0为黑色,1为白色。
在预先输入羽毛球颜色的参数后,程序会自动对摄像头捕捉到的画面进行区域识别,并返回框选区域的位置(图5)。根据羽毛球在画面偏左侧或右侧的结果,树莓派控制舵机,带动小车相应地向左或向右偏转。
3.4距离定位
物品位于画面中心后,激光测距传感器可以比较准确地测量小车和待捡物品之间的距离。小车通过前后移动,调整距离至合适的值,此时物品的识别功能完成。
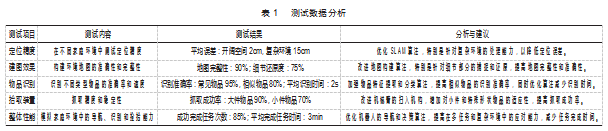
4测试验证与效果分析
测试验证和效果分析如表1所示。设计团队可以了解机器人在实际家庭环境中的表现,发现潜在的问题和不足,并据此进行改进和优化。这些测试结果对于提升机器人的性能、可靠性和用户体验至关重要,也是机器人最终能够成功进入市场并受到消费者欢迎的关键。通过项目式教学,培养了学生的动手能力和团队合作能力,取得了丰硕的成果。在实践教学中取得了显著成果。学生通过实际操作和案例研究,深入理解了结构套件的应用原理和技巧。能够独立设计、搭建和编程机器人,提高了实践能力和创新思维。此外,学生还学会了如何将结构套件应用于不同领域的机器人,如服务、医疗和工业等,为未来的职业发展打下了坚实基础。通过参与项目实践,学生们不仅掌握了机器人搭建的关键技术,还培养了团队合作和问题解决能力。这种实践教学模式为学生提供了广阔的发展空间,激发了他们对机器人技术的兴趣和热情,为我国机器人产业的发展储备了优秀的人才。在实践教学中,共计形成系统性12套教学案例;设计智能机器人套件共计6套方案;支持学生参与大赛3项,所取得荣誉共计6项;在实验室建设方面,并申请实验室建设成果奖1项,丰富实践教学内容。
5结束语
本文针对现有家庭清洁机器人在捡拾大体积或大质量物品方面的局限性,提出并设计了一种基于计算机视觉和同时定位与地图构建(SLAM)技术的家用多功能捡拾机器人。通过将计算机视觉技术与SLAM技术相结合,实现了对家庭环境中各种物品的识别、分类、捡拾与定位,提高了清洁效率和质量。该机器人的设计不仅体现了人工智能与物联网技术在家庭服务机器人领域的应用,也为家庭机器人技术的发展提供了新的设计思路和解决方案。在实践教学中,学生团队通过项目式学习,掌握了机器人设计与搭建的关键技术,培养了团队合作和问题解决能力。教学成果表明,实践教学模式能够有效提升学生的动手能力和创新思维,为我国机器人产业的发展储备了优秀人才。
总体而言,本研究在机器人技术、智能家居服务以及实践教学等方面取得了显著成果,为家庭机器人领域的发展提供了新的设计思路和技术解决方案,同时也为相关教育实践提供了有益经验。未来,将继续探索和研究,以期为家庭机器人技术的进步和普及做出更多贡献。
参考文献:
[1]王刚,周军,苏晓明.家庭服务机器人自主定位控制[J].计算技术与自动化,2021,40(3):13-17.
[2]姜昊辰,刘衍青,彭镜铨,等.基于语义先验和深度约束的室内动态场景RGB-D SLAM算法[J].信息与控制,2021,50(3):275-286.
[3]LI G H,CHEN S L.Visual slam in dynamic scenes based on ob⁃ject tracking and static points detection[J].Journal of Intelligent&Robotic Systems,2022,104(2):1-10.
[4]易文泉,赵超俊,刘莹.移动机器人自主定位与导航技术研究[J].中国工程机械学报,2020.18(5):400-405.
[5]KHANNA S.Artificial intelligence a modern approach[J].Ap⁃plied Mechanics&Materials,2010(5):2829-2833.
[6]王田苗,陶永,陈阳.服务机器人技术研究现状与发展趋势[J].中国科学:信息科学,2012,42(9):1049-1066.
[7]JAE HAN P B,SEUNG H B,MOON H.An intelligent navigation method for service robots in the smart environment[C]//IEEE 2007 International Conference on Control,Automation and Sys⁃tems.Seoul,South Korea,2007:1691-1696.
[8]KIM J T,CHOI Y H,LEE J D.Floor-to-floor navigation for a mobile robot[C]//2013 10th International Conference on Ubiqui⁃tous Robots and Ambient Intelligence(URAI),2013.
[9]DISSANAYAKE G,DURRANT-WHYTE H,BAILEY T.A com⁃putationally efficient solution to the simultaneous localisation and map building(SLAM)problem[C]//IEEE International Con⁃ference on Robotics and Automation.Symposia Proceedings(Cat.No.00CH37065),April 24-28 2000,San Francisco,CA,USA.New York:IEEE,2000,2:1009-1014.
[10]邸凯昌,万文辉,赵红颖,等,视觉SLAM技术的进展与应用[J].测绘学报,2018,47(6):84-93.
[11]王田苗,陶永.我国工业机器人技术现状与产业化发展战略[J].机械工程学报,2014,50(9):1-12.
[12]NEUMANN M,PREDKI T,HECKES L,et al.Snake-like,tracked,mobile robot with active flippers for urban search-and-rescue tasks[J].Industrial Robot,2013,40(3):246-250.
[13]SIEGWART R,NOURBAKHSH I R.Introduction to autono⁃mous mobile robots[M].Massachusetts:MIT Press,2004.
[14]CRAIG J J.Introduction to robotics:mechanics and control[M].London:Pearson Education,2005.
[15]蔡自兴.机器人学[M].北京:清华大学出版社,2009.
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/80688.html