摘要:针对大功率矿井皮带机用感应电机无速度传感器系统带负载启动困难的问题,提出一种无速度控制工程实用方法,电机起动采用电流单闭环I/F控制,进入低频运行后应用自适应状态切换策略调节转矩电流,当系统满足设定的切换条件时投入磁链、速度闭环矢量控制,实现速度及转矩的平滑状态切换,满足矿井皮带机在各种负载工况下的启动及全速度范围正常运行。以一种混合磁链模型作为MRAS转速估计器的参考模型,电机低频运行阶段能得到较精确的转速估计值,可以较早使系统切换到矢量控制模式,在交流对拖样机平台进行了带负载起动及中高速运行实验,电机可以顺利起动并在3 Hz时满足切换条件,平滑切换到矢量控制模式,电机转速响应快,动态特性较好,实验结果表明了该方法的正确性和有效性。
关键词:无速度传感器,I/F控制,MRAS,状态切换
0引言
在矿井运输系统中,皮带机是用于输送煤炭、矿石等物料的重要设备,目前皮带机驱动应用较多的是感应电机变频控制系统[1-3]。感应电机的高性能调速往往需要速度闭环控制,常用的方法是安装速度传感器,然而这会增加系统成本和体积,且矿井环境恶劣,降低了系统的抗干扰及可靠性,因此,应用无速度传感器控制尤为重要[4-5]。矢量控制是目前广泛应用的高性能调速方式,常用的无速度矢量控制方法包括卡尔曼滤波观测器[6]、模型预测控制[7]、模型参考自适应(MRAS)算法[8-9]、全阶自适应观测器[10-11]等,矢量控制的关键技术是磁链观测和转速估计[12],由于逆变器存在非线性电压误差和定子电阻压降等原因导致磁通量不稳定,使得以上算法在电机低频运行时很难准确观测磁链,特别在零速时,转速估计误差很大[13]。
针对以上问题,研究人员进行了大量探索,目前研究最多的是基于全阶自适应观测器的矢量控制。文献[14]分析了定子电流误差的传递函数,构建了转速估计的收敛条件,并设计了自适应全阶观测器的反馈增益矩阵和转移条件;文献[15]结合感应电机低速时定子电阻变化的影响,构建了基于转速和定子电阻的双参数辨识全阶自适应观测器。文献[16]将电压误差注入全阶磁链观测器中,确保系统状态变量的可观测性,实现系统在低频区域的稳定运行。改进后的全阶自适应观测器控制策略提升了感应电机带负载起动及低频运行性能,但是对于高压大功率的矿井皮带机用感应电机,由于定子电阻值极小,低速时定子电压极低,导致非线性电压误差和定子电阻压降的补偿效果仍然不佳,电机起动转矩不足。
综上,针对矿井皮带机用感应电机无传感器控制系统,本文提出一种“低频电流闭环——中高频矢量控制”的感应电机无传感器控制方法,并设计了2种模式自适应平滑切换的控制策略。该方法在电机起动及低频运行时以开环I/F控制运行,避开逆变器非线性电压误差和定子电阻变化导致磁链观测不准确的区间,提高起动转矩,中高频时切换到矢量控制,此时磁链误差可忽略不计,该方法可满足矿井皮带机带负载起动及全速度范围正常运行。
1感应电机转速辨识
1.1基于MRAS的转速
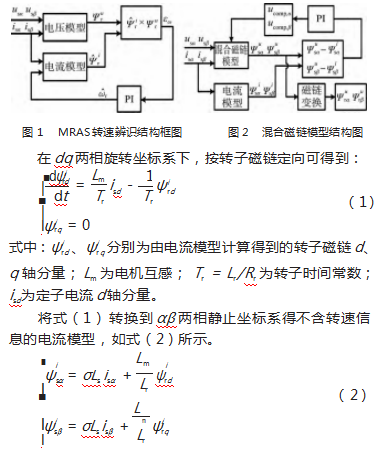
采用MRAS转速辨识的流程如图1所示,用含有转速信息的电流模型作为可调模型,电压模型作为参考模型,两模型输出相同物理量转子磁链Ψru和ri,把Ψru和ri的偏差εω送入PI调节器,调节器的输出即为期望的转速估计值r,当这个估计值接近真实转速时,输出误差εω趋近于0[17]。
1.2基于反电动势的混合磁链参考模型
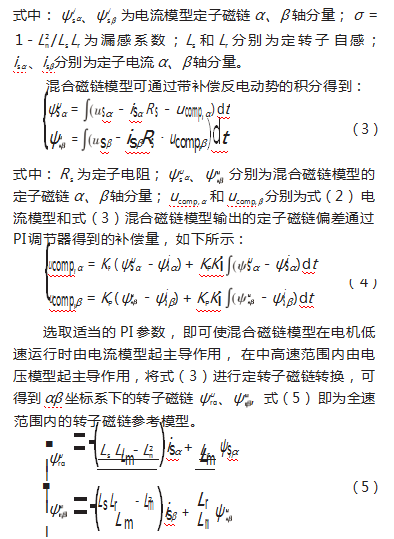
MRAS转速估计的准确度取决于参考模型能否精准反映电机的状态。传统MRAS以电压模型作为参考模型,然而受纯积分环节及定子电阻参数不准的影响,在电机低频运行时由电压模型计算得到的转子磁链偏差较大,转速估计也受很大影响[18]。本系统采用一种混合磁链模型作为参考模型,有效解决了传统电压模型存在的问题。图2所示为混合磁链模型结构图,混合磁链模型的本质是基于反电动势积分的电压模型,但是在电机低速时由电流模型提供误差补偿。
实践证明,采用式(5)作为MRAS转速估计器的参考模型,电机转速2 Hz以上可得到较准确的转速估计值,为保证系统裕量,本系统选定3 Hz作为两种控制模式的切换频率fsw。
2感应电机控制策略
2.1全速度范围无速度控制
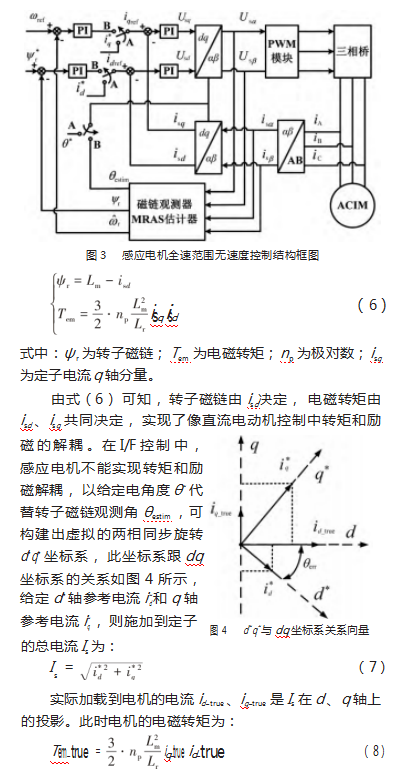
图3所示为感应电机全速度范围无速度控制框图,电机起动时开关处于A位置,系统运行在电流单闭环I/F控制模式,直接给定励磁电流参考值idref=i(取额定励磁电流)、转矩电流参考值iqref=i(取最大负载电流i max)进行电流闭环控制,给定角速度ω*的积分得到的电角度θ*用于坐标变换,此时转子磁链观测器和MRAS转速估计器保持同步运行。启动结束后进入低频运行,当估计转速到达切换频率fsw时,按照状态切换策略调节i,待满足切换条件时开关切到B位置,投入磁链、速度闭环控制,用转子磁链观测角θestim替换θ*,系统运行在矢量控制模式。
2.2电流单闭环I/F启动
I/F控制采用电流闭环和速度开环结构,根据转矩-转速特性设置合适的电流-频率比,以提高运行效率,相较于采用全开环结构的V/f控制,有效避免了过流问题[19-20]。
感应电机按转子磁链定向矢量控制,在dq坐标系下,稳态情况时相关计算公式为:
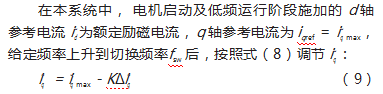
在I/F控制中,磁通不是恒定的,考虑到磁场饱和因素,实际输出的电磁转矩会小于Tem_true。带负载情况下,由式(7)可以看出电机电流会根据负载大小分配转矩和励磁电流分量,稳定后达到一个平衡状态,此时转矩大小取决于施加电流及负载情况,只要i足够大,就能够提供足够的转矩。实际运行中,可以根据最大负载情况确定i max大小,以满足最大负载工况下的启动运行。
2.3状态切换策略
假定在I/F控制和矢量控制中,施加相同的电流Is,由图4可以看出两个坐标系存在一个误差角θerr,若满足i=isd,则在理想情况下当θerr接近于0时,i接近于isq,在这个时刻由I/F控制切换到矢量控制可使得电机转矩脉动最小,从而实现两种控制模式的平滑过渡。
式中:K为运算周期数量;Δi为每个运算周期的调节步长。
当i减小时,电机会重新分配定子电流转矩分量和励磁分量,θerr也会减小,此过程中若负载较大,电机会减速,转差增大,以提供足够的负载转矩,为减少电机转速降低值,不需要将θerr调到0,当多次检测到θerr<θc即满足切换条件,可切换到闭环控制,本系统取θc=5°。同时,为减小切换过程中的电流冲击,将切换时刻i值设置为转速PI调节器的输出积分初值,i值设置为磁链PI调节器的输出积分初值。
3试验验证
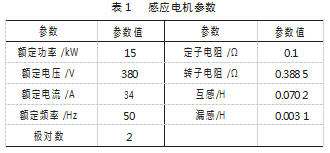
在交流对拖调速样机平台对文中控制策略进行实验验证,控制器采用DSP(TMS320F28346)+FPGA(xilinx Spartan-6),DSP主要用于实现控制算法及PWM脉冲生成,FPGA作为辅助控制,负责反馈信号采集处理和系统保护等功能。实验对象为15 kW感应电机,电机参数如表1所示,转矩最大电流给定i max设置为26 A,分别进行了直接切换、自适应状态切换和全速度范围运行特性实验。实验波形中电机转速为MRAS估计器输出值,转矩电流isq为通过电流传感器检测经坐标变换获得。
3.1直接切换实验
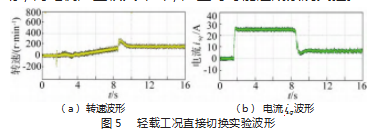
图5所示为轻载工况下I/F控制直接切换到矢量控制实验波形,可以看出电机启动阶段转速估计值波动较大,这是由于磁链观测器在电机低频阶段估计不准确造成,待转速升高后,转速估计值平稳。当转速到达切换频率fsw时直接切换到矢量控制,可看出转速和转矩电流isq波形都发生较大波动,这是由于轻负载所需电流较小,而实际加载电流很大,直接切换会导致调节器出现很大波动,对电机产生很大冲击,严重时可能造成系统失控。
3.2自适应状态切换实验
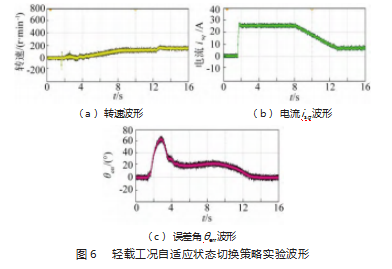
图6所示为轻载工况下按照本文的自适应切换策略由I/F控制切换到矢量控制实验波形,可以看出在电机启动阶段误差角θerr波动较大,这也是由于磁链观测器估计不准确造成的,转速升高后θerr保持平稳,转速到达切换频率fsw时,转矩反馈电流isq在i电流调节作用下缓慢减小,此时θerr也跟着减小,当多次检测到θerr小于5°时切换到矢量控制,可以看出转速和电流波形波动较小,切换过程较平滑。
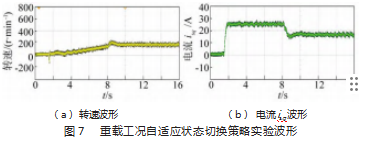
图7所示为重载起动实验波形,可以看出电机能够正常起动,且切换过程时间较短,这是由于重载启动时θerr本身较小,当到达切换频率fsw时会快速满足切换条件。
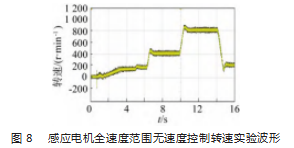
图8所示为带负载工况下电机全速度范围运行转速实验波形,可以看出电机在完成启动切换到矢量控制模式后,电机转速响应快,动态特性较好。
4结束语
为解决矿井皮带机带负载起动转矩不足的问题,以一种混合磁链模型作为MRAS转速估计器的参考模型,低速时通过电流模型对电压模型进行误差补偿,能够在低速时得到较精确的转速估计值;电机起动采用开环I/F控制,分析了I/F起动转矩提升原理,以虚拟两相同步旋转d*q*坐标系与磁链观测dq坐标系之间的夹角θerr<θc为控制目标,设计了开环起动及闭环矢量控制的自适应平滑切换策略,理论分析及试验结果表明,本文设计的无速度控制方法能够满足感应电机带负载起动及全速范围正常运行,该方法可用于不同功率等级矿井皮带机驱动系统及各种负载工况,具有较强的实用性和通用性。
参考文献:
[1]王惠臣.小保当一号煤矿主斜井带式输送机智能调速电控系统设计[J].煤炭工程,2021,53(6):17-22.
[2]郝相应,闫晓刚.煤矿带式输送机智能化控制系统设计[J].自动化,2022,48(S1):97-98.
[3]郝洪涛,杨庭杰,张超.基于负载估计的带式输送机系统节能控制方法研究[J].煤炭科学技术,2021,49(7):139-146.
[4]Wang Zhenyu,Sun Wei,Jiang Dong.Stability analysis and trajec‐tory design of a nonlinear switchingsystem for speed sensorless induction motor drive[J].IEEE Transactions on Industrial Elec‐tronics,2022,69(6):5514-5524.
[5]Chen Jiahao,Mei Jie,Yuan Xin,et al.Natural speed observer for nonsalient AC motors[J].IEEE Transactions on Power Electron‐ics,2022,37(1):14-20.
[6]张安伟,喻皓,张金良.基于强跟踪扩展卡尔曼滤波器的感应电机观测器设计[J].机电工程技术,2021,50(7):214-215.
[7]李争,安金峰,肖宇,等.基于自适应观测器的永磁同步直线电机模型预测控制系统设计[J].电工技术学报,2021,36(6):1190-1200.
[8]江松秦,董绍江,蔡巍巍,等.基于模型参考自适应的感应电机转速辨识新方法研究[J].组合机床与自动化加工技术,2019(6):90-97.
[9]张志文,赵健康,安柏楠,等.基于ILC算法的PMSM模型参考自适应矢量控制[J].电力电子技术,2018,52(6):53-56.
[10]沈凤龙,满永奎,王建辉.基于改进全阶状态观测器的异步电机速度估算系统[J].微电机,2019,52(6):34-39.
[11]蒋林,刘梁鸿,张玉翠,等.基于滑模控制的异步电机全阶观测器研究[J].电气传动,2019,49(4):19-20.
[12]李娟,卢子广.感应电机新型自适应矢量控制极低速与零速稳定性研究[J].中国电机工程学报,2023,43(16):74-83.
[13]吕英俊,刘卓伟,苏涛,等.异步电机无传感器矢量控制极低速与零速性能研究[J].中国电机工程学报,2019,39(20):95-103.
[14]刘聪,韩亚丽.感应电机模型预测起动控制策略[J].微电机,2019,52(12):101-105.
[15]尹忠刚,张延庆,杜超,等.基于双辨识参数全阶自适应观测器的感应电机低速性能[J].电工技术学报,2016,31(20):111-121.
[16]王震宇,孙伟,蒋栋.基于虚拟电压注入的闭环磁链观测器的感应电机无速度传感器矢量控制系统[J].电工技术学报,2022,37(2):332-343.
[17]吴新兵,章玮,谈方成.基于同步坐标系MRAS的异步电机无速度传感器控制[J].微特电机,2023,51(4):47-48.
[18]张懿,徐斌,魏海峰,等.新型模型参考自适应的PMSM无差拍电流预测控制[J].电机与控制学报,2023,27(9):159-160.
[19]尹泉,张馨月,罗慧,等.PMSM抑制I/F启动策略稳态速度波动的新型方法[J].电气传动,2020,50(6):3-4.
[20]曲浩,曲宝军,周海安,等.永磁同步电机无位置传感器混合控制策略[J].组合机床与自动化加工技术,2021(9):90-93.
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/79276.html