SCI论文(www.lunwensci.com)
摘要:为了解决传统的机器人手结构简单,在一些复杂的抓取作业中无法满足实际生产需要、难以兼顾精确性和自适应性、运动模式和夹持功能单一的缺陷,以及灵巧机器人手结构复杂、控制困难等问题,提出了一种基于多回路绳轮传动式的多模式欠驱动机器人手的设计方案。该欠驱动式机器人手设计方案从驱动和传动方式的选择、手指设计、运动状态等多个方面提出,利用Solid⁃Works和CAD对机器人手结构进行建模,并对其不同指节接触到待夹取物体的不同运动状态进行分析。由分析可知,其独特的欠驱动设计,在保留原有的稳定夹持功能的同时提高了对不同物体夹持的适应性,在实现了自适应夹取和平行夹取两种工作模式的同时简化了驱动和控制设计过程,使得对目标物体的夹持更具针对性,夹持过程更加稳定,左右两指均可实现自适应夹持工作,可以有效解决传统机器人手存在的缺陷。
关键词:绳轮传动;欠驱动;机器人手;平夹自适应
Design of a Multi-mode Under-actuated Robot Hand Based on Rope Wheel Drive
Jiang Tianhuai1,Huang Long2,Fan Shuhao2,Li Taotao2,Yu Qun2
(1.International College of Engineering,Changsha University of Science and Technology,Changsha 410114,China;
2.College of Automotive and Mechanical Engineering,Changsha University of Science and Technology,Changsha 410114,China)
Abstract:In order to solve the problems of traditional robot hands,such as simple structure,inability to meet actual production needs in some complex grasping operations,difficulty in taking into account accuracy and adaptability,single movement mode and clamping function,and complex structure and control difficulties of dexterous robot hands.A design scheme is proposed for a multi mode under-actuated robot hand based on multi loop rope wheel transmission.The under-actuated robot hand design scheme is proposed from multiple aspects such as the selection of drive and transmission modes,finger design,and motion state.SolidWorks and CAD are used to model the structure of the robot hand,and the different motion states of its different knuckles contacting the object to be gripped are analyzed.From the analysis,it can be seen that its unique under-actuated design improves the adaptability to different object clamping while retaining the original stable clamping function.It simplifies the driving and control design process while implementing two working modes,namely adaptive clamping and parallel clamping,making the clamping of target objects more targeted and more stable,and enabling both left and right fingers to achieve adaptive clamping,and it can effectively solve the defects of traditional robot hands.
Key words:cable-pulley transmission;under-actuated;robotic hand;parallel adaptive clamping
0引言
近几十年来,由于生产技术和生产力发展,人们对于工业机器人的需求逐渐增大。以机器人手为例,目前市面上大部分用于搬运的机器人手通常都提前根据具体任务设定夹取方式。这种单自由度夹取的工作方式功能单一,无法自适应复杂的工作环境[1]。而灵巧机器人手虽然适应能力强,功能多样,但结构复杂,负载能力差,精确度低,控制困难且成本较高[2]。这时为了实现自适应抓取需要增加机器人手的机构自由度,但是增加自由度会伴随着控制系统和驱动系统的复杂化,使得机器人手难以控制,并且使生产成本提高[3]。因此,本文的目的旨在提出一种新型的机器人手设计方案,解决传统机器人手存在的问题。
为适应自动化生产、运输和搜救等复杂工作场景,实现自适应抓取,目前国内外最新的研究成果是多自由度欠驱动式机器人手[4]。相较于传统机器人手和灵巧机器人手,欠驱动机器人手的欠驱动设计是指驱动器数量小于手指关节自由度。欠驱动机器人手独特的欠驱动设计使其在保留原有夹持功能的同时增加了良好的适应性,其优势在于其可以实现机器人手指自适应抓取物体的形状大小和位置,控制机器人手自适应抓取,同时可以减少控制器数量,降低控制难度和成本[5]。
目前国内外在欠驱动机器人手方面的研究已经有了一定的基础,多种已经研发出来的机器人手已具备自适应工作方式。例如英国机器人公司Shadow研发的Shad⁃ow hand[6],其外形尺寸与人手类似,由5根手指组成,共23个自由度,传动部分采用腱绳传动,有气压驱动和电机驱动两种驱动方式;韩国工业技术研究所的研发团队于2017年研制的一款使用双模式TSA驱动器的仿人手[7],由5根手指组成,共6个自由度,拇指由两个电机驱动,一个用于内收、外展运动,另一个用于屈曲、伸展运动;哈尔滨工业大学和德国宇航中心于2009年共同研制的第二代机器人手爪HIT/DLR-II Hand[8-9],由5根手指组成,每根手指有4个关节、3个自由度,其中MCP关节(指掌关节)有两个自由度,可以实现屈曲和侧摆,DIP关节(远端指节)和PIP关节(近端指节)通过8字形缠绕的腱绳联动,采用电机驱动,同步带传动;2016年,华中科技大学团队研发了外观类似于人手的灵巧机器人手指X-hand,其指尖力大于12 N,完全屈曲运动需要12 s,全手有16个关节,但仅有4个驱动器,可实现30种抓取方式[10-11]。以上均为国内外较为成功的研究案例,分析这些案例可发现,多自由度欠驱动的设计理念是解决传统机器人手缺陷的一种有效的方法,同时这些研究案例也为本文欠驱动机器人手的设计提供了理论基础。
虽然国内外已经出现很多成功的新型机器人手的研究案例,但是对于传统机器人手能否兼顾精确性和自适应夹取的研究仍有待深入。本文综合各种研究方向,从传动和驱动方式选择、欠驱动手结构设计以及运动方式等方面提出了一种基于绳轮传动式的欠驱动自适应机器人手的设计方案,希望可以更好地解决传统机器人手存在的问题。
1欠驱动传动机构与驱动方式选择
1.1传动机构
欠驱动机器人手最大的特点是驱动元件数量小于关节自由度。相对于传统机器人手,欠驱动机器人手可达成自适应夹取的工作目标;相对于灵巧机器人手则减少了驱动原件,简化控制难度。其工作方式是通过机械机构的限位和弹簧等被动元件使得多自由度的机构按照预期的方式传动运动。经查阅国内外资料,欠驱动手主要有连杆传动,绳轮传动和齿轮传动3种传动方式[12]。通过对以上几种传动方式的比较,针对欠驱动机器人手设计的功能性和精确性,综合抓取性能、抗冲击能力、制造成本等方面,选择绳轮传动方式作为欠驱动机器人手传动系统的主体结构[13]。
1.2驱动方式
目前主流的机器人手驱动方式有液压驱动、气压驱动和电机驱动3种[14]。
液压驱动的工作原理是将液压油流动产生的液压能转化为机械能,驱动机器人手运动。液压驱动技术在目前已十分成熟,其具有传递运动平稳,负载变化时速度稳定,具备过载保护能力等多种优点。但是因为其工作易受到工作温度影响,而且存在漏油等问题,液压驱动的方式很少运用到机器人手设计上。
气压驱动的工作原理是将空气的压力能转化成机械能,驱动机器人手运动。相对于液压驱动,气压驱动因为介质为空气,不存在漏油污染环境的问题,而且反应时间短。但是另一方面,由于空气的可压缩性较大,其工作稳定性较低,而且工作压力低,负载和输出的力矩较小。所以气压驱动也很难应用于机器人手设计。
电机驱动的工作原理是利用通电线圈产生旋转磁场并作用于转子形成磁电动力旋转扭矩从而实现驱动。目前有交流电机、直流电机、无刷电机、步进电机等种类,可以满足不同工作输出力矩的需求,作为工业上的成熟产品,工作效率很高,且电机驱动可以保证驱动的精度和输出力矩的稳定性,适合应用于机器人手。
通过对以上驱动方式的比较,选择电机驱动作为欠驱动机器人手驱动模块的主体结构。
2欠驱动手结构设计
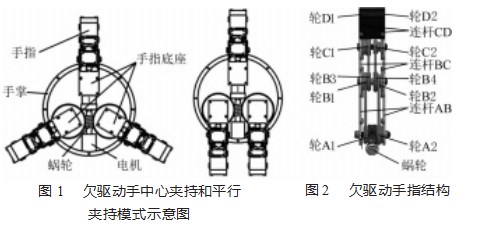
本文提出的欠驱动手由手掌和3个手指组成,其中的一个手指的底座与手掌固连,其余两个手指的底座分别与其底部的蜗轮固连,跟随蜗轮一起旋转。上述两个蜗轮与手掌内的同一个蜗杆啮合传动。这样可通过电机驱动蜗杆,带动两侧手指的同步旋转,从而实现夹持模式的变化,如图1所示。若电机驱动蜗杆顺时针旋转,则左侧蜗轮做逆时针旋转,右侧蜗轮顺时针方向回转,两侧蜗轮回转方向相反,速度相同,停止运动时,两侧手指旋转角度也相同,达到中心夹持的工作模式;若两侧手指不运动,则达到平行夹持的工作模式。
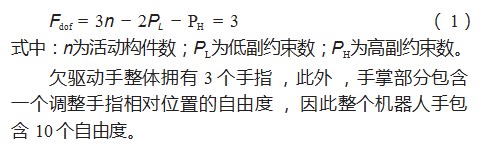
单个手指的结构如图2所示。该欠驱动手指主要由近端指节(连杆AB)、中间指节(连杆BC)、远端指节(连杆CD)、轮A1、轮A2、轮B1、轮B2、轮B3、轮B4、轮C1、轮C2、轮D1、轮D2、蜗轮等构件组成。其中轮A1与手指基座之间通过转动副连接,且两者之间装有扭簧,轮A1与轮B1之间通过绳轮副连接,两轮直径相同;轮B1与轮B2固连,且轮B3与轮C1之间通过绳轮副连接;轮A2与蜗轮固连,而蜗轮通过电机上固连的蜗杆驱动,轮A2与轮B2之间通过绳轮副连接,两轮直径之比为3∶2;轮B4与轮B3固连,并与轮C2之间通过绳轮副连接,两轮直径之比为3∶2;轮C2与远端指节(连杆CD)固连。此外,中间指节与远端指节之间装有扭簧,并且存在机械限位;轮C1与远端指节之间也装有扭簧。
同时,在两种工作模式下,本文针对欠驱动机器人手的夹取模式提出了平行夹取模式和自适应夹取模式。
自适应夹取模式是指指节接触到物体时,与物体接触的指节立刻停止运动,同时,远端指节开始发生相对运动形成包络趋势将物体包住,类似于人手抓取物体的方式[15-16]。其优势在于可以在指节接触到物体后对物体进行包络,稳定地进行抓取,而缺点是不便于夹取平面物体。
平行夹取模式与自适应夹取模式相反,其原理是近端指节旋转时远端指节不做相对运动,利用3根手指的远端关节平行夹取物体[15-16]。相对于自适应夹取模式,其对夹取平面物体有较好的效果,但是不能对物体进行包络。
由于本设计的目标物体是夹取较小的物体,为了增加机器人手对物体的包络性和满足对平面物体以及不规则物体的夹取需求,选择自适应夹取与平行夹取模式结合的夹取模式。将平夹抓取与自适应夹取结合起来,靠近被夹取目标物体过程采用平行夹取模式,当指节接触物体后再采用自适应夹取模式[17]。
3欠驱动手运动状态分析
3.1自由度
欠驱动手的自由度可以由自由度计算公式来计算。计算自由度时,需将扭簧忽略不计。欠驱动手每个手指中包含轮A1、轮A2、轮B1、轮B2、连杆AB、连杆BC、连杆CD等10个活动构件,包含低副(转动副)10个,包含高副(绳轮副)7个。因此单个手指的自由度计算如式(1)所示。
3.2不同指节接触物体运动状态
由于本设计的设计目标是实现稳定的平行夹取和自适应夹取功能,为实现预定的设计目标,需要设计一个自适应夹取机构和一个平行夹取机构。本文采用双回路绳轮传动方式,通过设计绳轮与指节、轴之间的连接方式,同时加入扭簧实现远端指节始终与机架保持平行,结合平行绳轮系统,在接触到目标夹持物体后,驱动远端指节,使得手指实现包络功能。
夹持工作过程分为手指靠近物体的过程和手指对物体进行夹持的过程,其中夹持过程分为远端指节先接触物体,中间指节先接触物体和近端指节先接触物体3种情况。当手指远端指节先接触到物体时,由于物体对手指施加的力的作用,远端指节停止平移运动,带轮轴C1转动,其余两个指节继续运动,最终使3个远端指节对物体实现平行夹取,如图3所示。
当中间指节先接触到物体时,由于近端指节与中间指节之间机械限位的存在,无法保持相对位置,此时驱动轮继续施加驱动力,中间指节由于受力被限制成为机架,轮C1与轮C2间的扭簧变形,远端指节平移运动规律被破坏,远端指节绕带轮轴C1做回转运动,从而对物体实现包络,最终实现自适应夹取,如图4所示。
当近端指节先接触到物体时,同理,驱动轮继续施加驱动力,近端指节由于受力被限制成为机架,中间指节和远端指节可看作刚体绕带轮轴B1转动,当中间指节完全接触物体时,远端指节绕带轮轴C1转动,直至完全包络物体,实现自适应夹取,如图5所示。
通过对不同指节接触物体之后运动状态的分析,可知本设计方案可以有效地完成自适应夹取和平行夹取两种夹取工作。
4结束语
欠驱动设计作为一种新型机器人手设计方案,可以在保证原有夹持效果的情况下简化机器人手结构,提高夹持适应性,实现自适应夹取。本文基于近些年国内外有关于欠驱动机器人手的研究,提出了设计的目的和需解决的问题,并且从传动和驱动方式的选择、手指设计、运动状态等多个方面创新地提出了一种基于绳轮传动的多模式欠驱动机器人手的设计方案。该设计方案下的欠驱动机器人手可实现中心夹持和平行夹持两种工作模式,通过对欠驱动手模型和对不同指节接触物体后运动状态的分析,可知其可以对不同物体实现平行夹取和自适应夹取两种夹取方式,具有结构简单,工作可靠等优势,在实现自适应夹取的同时可兼顾夹取精确性。将欠驱动设计和绳轮传动同时应用于机器人手,可以在保证夹持效果并实现自适应夹取的同时简化机器人手的结构,降低控制难度,对解决传统机器手存在的各种问题具有重要意义。
参考文献:
[1]Kemp C C,Edsinger A,Torres-Jara E.Challenges for Robot Ma⁃nipulation in Human Environments-Developing Robots that Perform Useful Work in Everyday Settings[J].IEEE Robotics andAutomation Magazine:A publication of the IEEE Robotics and Automation Society,2007(1):14.
[2]徐卫东.新型多指灵巧手的结构设计及系统仿真研究[D].青岛:山东科技大学,2018.
[3]张颖,乔贵方,万其,等.具有自适应能力的3指机械手爪的设计与实现[J].机械设计,2020,37(11):102-108.
[4]吴立成,杨国胜,孙增圻.欠驱动手指机构研究现状[C]//中国自动化学会智能自动化专业委员会.2011年中国智能自动化学术会议论文集(第一分册).中南大学出版社,2011:6.
[5]张文增,陈强,孙振国,等.具有形状自适应的欠驱动拟人机器人手指[J].机械工程学报,2004(10):115-118.
[6]邱鹏飞,宋蕴璞,何东伟,等.Shadow仿人灵巧手参数结构优化及分析[J].机电一体化,2018,24(2):20-24+41.
[7]Jeong Seok Hwan,Kim Kyung Soo.Designing Anthropomorphic Robot Hand With Active Dual-Mode Twisted String Actuation Mechanism and Tiny Tension Sensors[J].IEEE Robotics and Au⁃tomation Letters,2017,2(3):1571-1578.
[8]刘伊威,金明河,刘宏.DLR/HIT多指机器人灵巧手的研究[J].哈尔滨工业大学学报,2009,41(5):47-51.
[9]刘伊威,金明河,樊绍巍,等.五指仿人机器人灵巧手DLR/HIT HandⅡ[J].机械工程学报,2009,45(11):10-17.
[10]Xiong Caihua.Design and Implementation of an Anthropomor⁃phic Hand for Replicating Human Grasping Functions[J].IEEE Transactions on Robotics:A publication of the IEEE Robotics and Automation Society,2016,32(3):652-671.
[11]陈文锐.欠驱动拟人手的设计及抓握操作理论与方法研究[D].武汉:华中科技大学,2017.
[12]骆敏舟,杨秀清,梅涛.机器人手爪的研究现状与进展[J].机器人技术与应用,2008(2):24-35.
[13]马涛,杨冬,赵海文,等.一种新型欠驱动机械手爪的抓取分析和优化设计[J].机器人,2020,42(3):354-364.
[14]刘辰,赵升吨.并联机器人结构及驱动方式合理性的探讨[J].机械科学与技术,2013,32(6):796-800.
[15]刘彦恺,张文增.弹性霍肯连杆直线平夹自适应机器人手研制[J].机械传动,2022,46(8):162-166.
[16]苏靖惟,张文增.单链传动双齿条平夹间接自适应机器人手研制[J].机械传动,2019,43(2):154-161.
[17]夏海超,白国振,王潇榕,等.一种双向平夹感知自适应机器人手指设计[J].农业装备与车辆工程,2019,57(1):14-18.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网! 文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/77437.html