SCI论文(www.lunwensci.com)
摘要:基坑水平位移监测是基坑安全的重要检测项目之一。针对现有的阵列式位移计在基坑水平位移监测中容易产生扭转误差的问题,设计了一种基于MEMS加速度计与磁力计的位移计,能够同时满足基坑水平位移与沉降位移监测的需求。介绍了位移计自动化实时监测系统组成。对位移计的结构以及监测节的硬件电路进行了设计,并制作完成了位移计样机。阐述了位移计通过对加速度计与磁力计的数据进行融合,计算位移坐标的测量原理和扭转误差校正的方法。最后通过模拟监测节间发生扭转时位移计水平位移监测的实验,以及位移计沉降位移监测试验。实验结果表明,该位移计能够精确测量水平与沉降位移,并能够有效校正位移计竖直安装时监测节扭转带来的扭转误差。
关键词:MEMS加速度计;磁力计;姿态解析;扭转校正
Displacement Meter Design Based on MEMS Accelerometer and Magnetometer
Wang Xiaochu,Liu Xiangbang,Zhang Shenghui,Liu Qiang
(School of Mechanical and Electrical Engineering,Guangdong University of Technology,Guangzhou 510006,China)
Abstract:The horizontal displacement monitoring of foundation pit is one of the important testing items of foundation pit safety.In view of the problem that the existing array displacement meter is easy to produce torsional error in the monitoring of horizontal displacement of foundation pit,a displacement meter based on MEMS accelerometer and magnetometer is designed,which can meet the requirements of monitoring horizontal displacement and settlement displacement of foundation pit at the same time.The composition of automatic real-time monitoring system of displacement meter is introduced.The structure of the displacement meter and the hardware circuit of the monitoring section are designed,and the prototype of the displacement meter is made.The measuring principle of displacement coordinate calculation and the method of torsion error correction by integrating the data of accelerometer and magnetometer are described.Finally,the horizontal displacement monitoring experiment of the displacement meter and the subsidence displacement monitoring experiment of the displacement meter are simulated to monitor the torsion between nodes.The experimental results show that the displacement meter can accurately measure the horizontal displacement and settlement displacement.The device also can effectively correct the torsion error caused by the monitoring joint torsion when the displacement meter is installed vertically.
Key words:MEMS accelerometer;magnetometer;attitude analysis;torsion correction
0引言
随着我国城市建设的迅猛发展,为提高土地资源利用率,深基坑工程日益增多。由于基坑工程技术复杂,不同地区土体情况,自然环境不同,容易导致各种安全隐患[1-2]。
现今基坑位移监测发展出了许多种监测技术。传统的边坡监测位移设备包括钻孔测斜仪、全站仪、经纬仪以及滑动式测斜仪等[3-5]。除了这些传统位移监测方法外,现在也出现了大量的新技术。如三维激光扫描、光纤传感技术、全球定位系统(GPS)以及全球导航卫星系统(GNSS)技术等。但都有各自的局限性,例如不能实现自动监测;不适用于位移较大的监测;精度难以保证;价格过高;维护保养困难等[6-7]。
其中阵列式位移计是一种主要基于MEMS加速度传感器的位移监测技术。它具有3D测量、高精度、监测位移范围大以及能够实时数据采集等优点,在国内外基坑监测中得到了越来越多的应用[8-14]。但由于自身结构的特点,监测节间容易发生扭转造成扭转误差[15]。
郑天翱等[16]提出了一种基于MEMS加速度计的柔性测斜仪设计方法,石永强等[17]提出了一种基于MEMS加速度计阵列的测斜仪设计方法,他们的测量原理中都未对阵列式位移计发生扭转的情况进行讨论。陈声震[18]提出了一种通过对位移数据进行分析,然后人工计算校正位移计扭转误差的方法。但该方法较为繁琐,需要人力去排查校准,实时性差。因此设计可以自动校正扭转误差的位移计是十分必要的。
1监测系统组成与位移计设计
1.1位移计监测系统
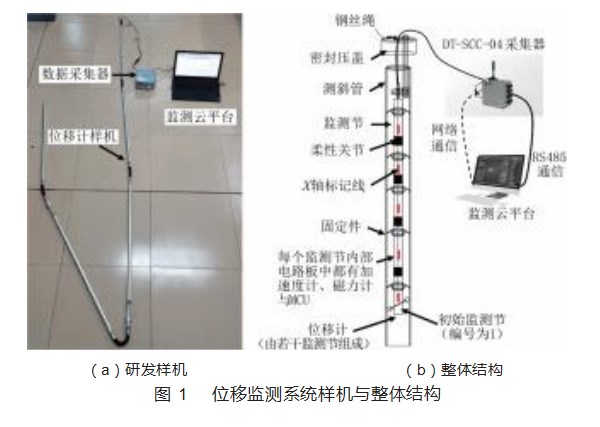
如图1(a)所示,本位移监测系统的设计由位移计、数据采集器和监测云平台构成[19]。由云平台发送采集指令给数据采集器,采集器将命令发送给位移计,位移计接收到指令后将采集数据返回给采集器。采集器将监测节的X、Y、Z轴加速度值与磁通量进行联合解算得到位移计的坐标值,PC端将坐标值上传至监测云平台,并进行二维、三维的图形显示。通过上述的过程,该系统就完成了对基坑位移的自动化监测。
位移计主要负责采集每一个监测节的三轴加速度计与磁力计的值,将其返回给数据采集器。数据采集器采用的是型号为DT-SCC-04采集器,具有存储空间大、实时自诊断、远程控制与功耗低的优点。在其固件上进行二次开发,实现了位移计可通过RS485通信协议与采集器进行识别与数据传输。采集器可通过RS232/RS485等有线方式组网或上传,也可通过无线方式上传到服务器端。
1.2位移计设计
1.2.1整体结构
如图1(b)中所示位移计由多个监测节组成,每两个监测节间通过柔性关节(凯夫拉纤维材料)连接。样机设计每个监测节长为0.75 m,柔性关节长为0.12 m。凯夫拉纤维材料具有高强度、高耐磨、高抗撕裂性的特点。满足位移计柔性关节负载强度大、耐磨、抗扭转的需求。监测节管材选择铝合金,也可是304不锈钢或者炭纤维,材质轻且磁性弱,对磁力计数据干扰较小。位移计放入预埋于土体或者墙体中的测斜管,为精确反映测斜管随监测对象的位移变化,需要将位移计固定于测斜管内。位移计设计了专门的定位件,通过拉力可以打开,拉力消失随即收缩。将钢丝绳固定于密封压盖上,密封压盖套在测斜管上方。通过位移计自身重量拉紧钢丝绳,随后定位件打开,将位移计牢牢固定于测斜管壁上。精确还原对应测斜管段的变形与位移,从而提高了监测节的位移测量精度。
1.2.2监测节硬件设计
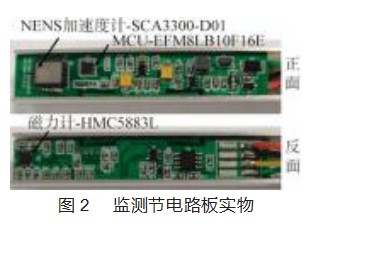
如图2所示,监测节作为一个独立的监测单元,其上都有一个单独的MCU,型号为EFM8LB10F16E,采用的是8051单片机架构,最高工作频率为72 MHz。它具有较为丰富的外设,性能稳定,性价比高。三轴加速度计型号为SCA3300-D01,通过SPI通信协议与MCU通信,具备超低功耗、零偏稳定性高和极低噪声等优点。磁力计采用HMC5883L,它通过I2C协议与MCU通信,在强磁场环境中罗盘航向精度达到1°~2°。采集器发送采集指令,监测节与监测节之间通过485传输总线进行连接。监测节的这种硬件设计,在满足位移计功能与精度的同时,简化了位移计的生产维护流程,具有低成本,低功耗的优点,具有良好的应用前景。
2姿态解析
2.1无扭转校准位移坐标计算
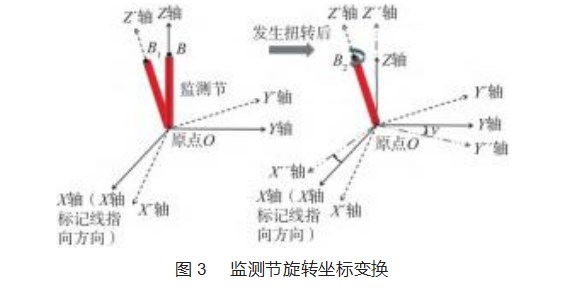
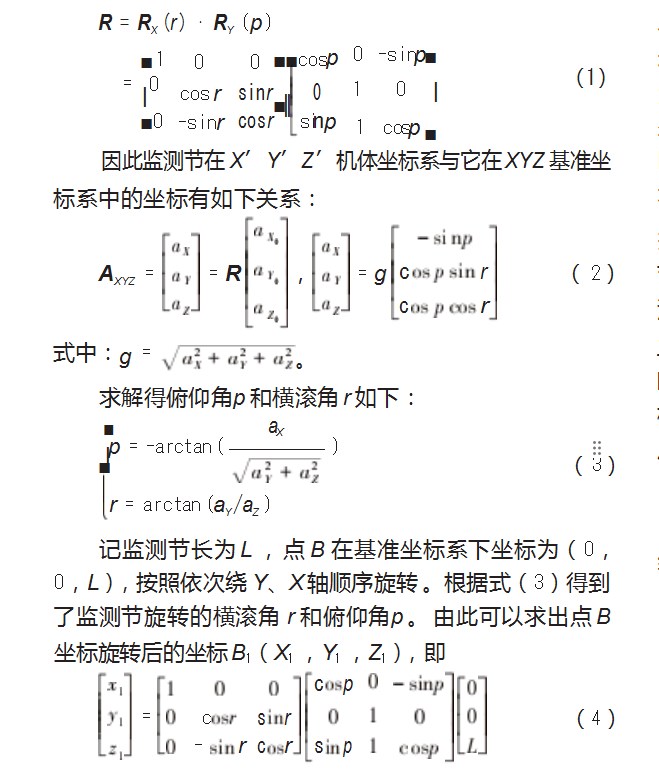
位移计由若干监测节组成,每个监测节的测量原理相同。如图3所示,以XYZ坐标系作为基准坐标系,基准坐标系的XY平面与地理空间坐标系的水平面平行,Z轴正方向与重力方向相反,监测节上X轴标记线指向X轴的正方向。OB为监测节的初始位置,安装时X轴标记线固定安装在监测方向上。理想情况下每个监测节的X轴标记线都保持朝同一个方向,监测节不会发生绕Z轴的旋转。此时其他监测节的基准坐标都与起始监测节(编号为1的监测节)的基准坐标相同。监测节经过位移变形后,监测节从基准坐标系转动到了自己的机体坐标系X′Y′Z′。根据欧拉角与旋转矩阵来进行姿态求解,此时监测节按照依次绕Y、X轴顺序旋转,对应旋转角依次为俯仰角p和横滚角r。
记监测节在XYZ基准坐标系与X′Y′Z′机体坐标系中加速度计的值分别为:
式中:i为监测节编号数;起始端编号为1;当k为监测节总量时就是位移计的整体位移。
使用此方法时有个前提,就是认为监测节绕Z轴方向不会发生转动。但是位移计在使用过程中监测节之间的柔性关节处可能发生扭转(主要是竖直安装情况下),监测的位移数据可能存在扭转误差。
2.2扭转校正位移坐标计算
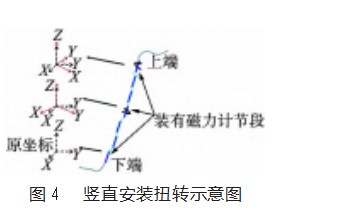
对于长度超过80 m的位移计,由于扭转效应积累,会导致监测数据产生较大偏移。如图4所示,虚线坐标系为设备标定后的初始状态,实线坐标系为扭转后的坐标系,上中下段的监测节都发生不同角度的扭转。
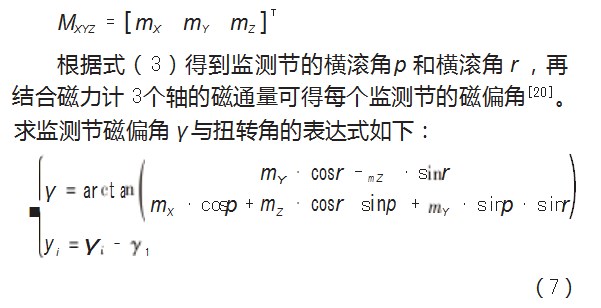
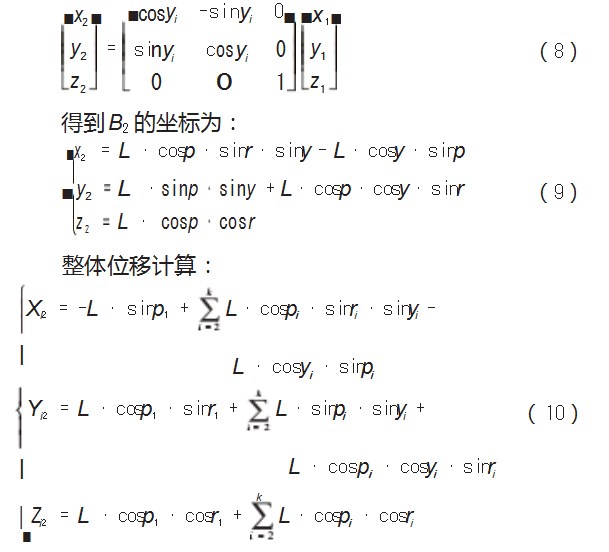
监测节发生扭转,虽然监测节位置可能未发生改变,但是基准坐标系由XYZ坐标系变为X"Y"Z"坐标系。为了将所有监测节的基准坐标统一,以起始监测节的坐标系为基准坐标系。通过加速度计与位移计数据求出每个监测节相对于磁北极的磁偏角γ。其他监测节通过与起始监测节的磁偏角进行对比,得到每一个监测节基准坐标系相对于起始监测节基准坐标系的扭转角y。通过旋转矩阵将其他监测节在X"Y"Z"基准坐标系下的坐标转换到起始监测节的基准坐标系下来,即为扭转校正(此方法只适用于竖直安装求水平位移情况下使用)。记监测节在X"Y"Z"机体坐标系中磁力计的值为:
式中:γ1为起始监测节的磁偏角;γi为第i节监测节的磁偏角;yi为第i节相对于起始监测节的扭转角。
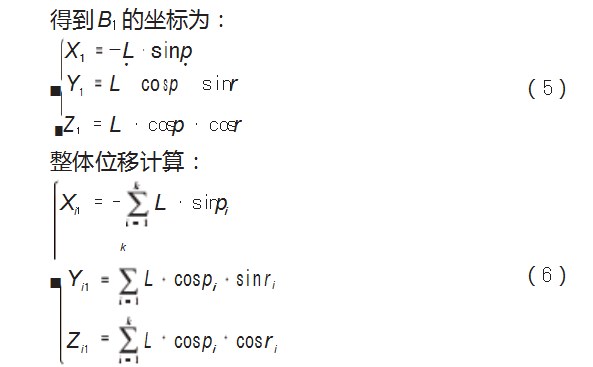
通过加速度计数据可以得监测节旋转后在自身基准坐标系下的坐标值B1(X1,Y1,Z1)。通过磁力计与加速度计数据联合解算,计算出扭转角度也就是航向角y。再将自身基准坐标系转换到起始监测节的基准坐标系B2(X2,Y2,Z2)。
到此从起始监测节三维坐标(0,0,0)开始,以起始监测节的基准坐标系作为整个位移计的基准坐标点系,约束起始监测节Z方向的旋转,起始监测节的X轴标记线指向监测方向。无论其他的监测节如何扭转,经过扭转校正后,监测的位移始终是监测方向的。顺着位移计往上依次递增,可以得到位移计整体扭转校正后的坐标值。
3模拟实验
3.1测量水平位移扭转校正模拟实验
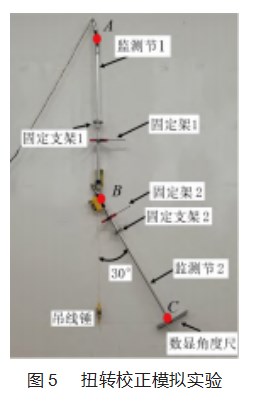
水平位移扭转校正模拟实验装置如图5所示,试验位移计样机采用两节监测节,每节监测节长为0.75 m,柔性关节处长度为0.12 m。实验中主要使用到的辅助设备有固定支架、数显角度尺(精度0.02°)、吊线锤以及固定夹。固定支架起到固定监测节位置的作用,固定支架与监测节之间可以通过扭转监测节,来调节监测节在固定支架上的角度。数显角度尺是一种可以测量角度的仪器。将其紧固在监测节2的末端处,以它显示的值作为实际扭转角的标准值。
为了简化试验流程,排除其他监测节带来的扭转误差,同时方便统计扭转带来的坐标误差。按照预设位置,将两节监测节通过固定支架安装于墙体之上。预设位置为监测节1竖直固定,监测节2与重力方向夹角为30°。如图中点B所示,监测节之间的柔性关节处通过螺纹连接。为方便扭转监测节2,将两节螺纹连接处松开。以点A作为位移计的起始点,两节监测节的X轴标记线方向指向同一磁偏角,为固定夹1和2指向方向,此时测得两节监测节的磁偏角均为25.63°左右(偏差±0.2°)。监测节2扭转后返回的磁偏角与监测节1的磁偏角25.63°之差记为补偿扭转角。根据预设位置,可以通过计算得到点C的预设坐标,并以此坐标作为基准坐标。由于监测节扭转并不会导致监测节Z轴坐标发生变化,所以本次实验只计算X、Y轴的坐标误差。
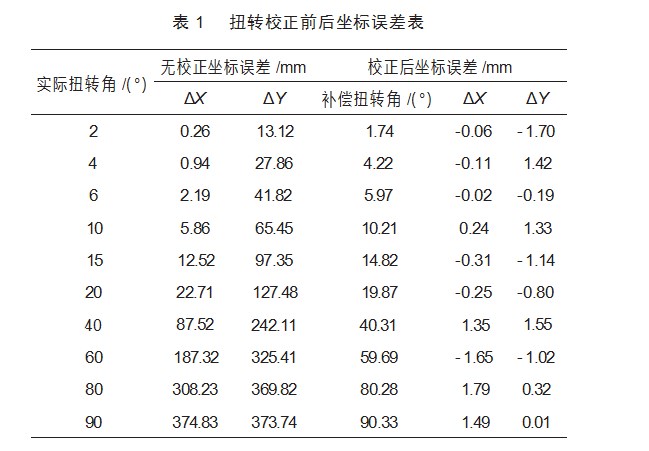
为模拟监测节2发生扭转的情况,按照2°、4°、6°、10°、15°、20°、40°、60°、80°、90°等10个角度分别扭转监测节2。通过计算可以得到监测节2返回的10个补偿扭转角。分别记录下点C未进行扭转校正下的X、Y坐标数据与进行扭转校正的X、Y坐标。将两者的坐标数据与预定位置C的基准坐标进行对比,得到了无扭转校正与进行扭转校正的坐标误差,如表1所示。
由于误差的存在,监测节2测出的补偿扭转角与实际扭转角相比误差在±1°以内。根据无扭转校正的坐标误差,可以知道监测节发生扭转对监测数据影响非常大。监测节2扭转了2°,Y轴坐标数据误差就达到了-13.62 mm,当扭转角增大到90°时,X轴和Y轴的坐标误差达到了375 mm左右。通过校正上述10个扭转角,点C坐标值X轴最大误差为1.79 mm,Y轴最大误差-1.70 mm,X轴的平均误差为0.25 mm,Y轴的平均误差为-0.02 mm。实验证明通过该方法能够有效地校正由于监测节扭转带来的误差。
3.2测量沉降位移模拟试验
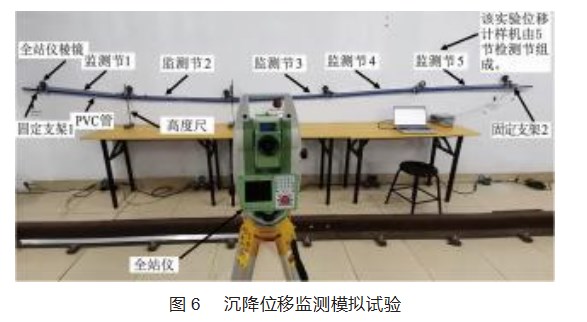
为了验证位移计在水平安装时测量沉降位移的可行性与精度,设计了模拟实验如图6所示。实验采用全站仪(徕卡Ts15)标准误差为1 mm+1.5 ppm,和数显高度尺误差为±0.03 mm与本系统位移计进行对比实验。实验模型主体主要为位移计、PVC管、固定支架。本次实验样机共采用5节,总长4.9 m,以监测节1的左端点作为零点。将位移计两端绑定在固定支架上,右端留有滑动间隙。使用卡箍将位移计的柔性关节的中点处与PVC管绑定,使得位移计与PVC管贴合在一起不会发生滑动。使用卡箍将全站仪棱镜固定在PVC管的测点处(柔性关节的中点)。
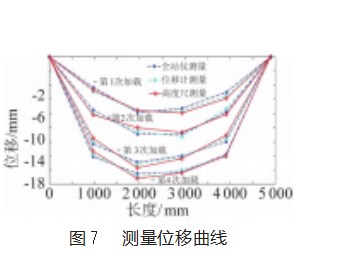
通过在PVC管上2/5与3/5处增加砝码,每个砝码质量100 g,分4次进行加载模拟不同沉降位移状态进行试验。每次加载后静止2 min,待数据稳定后进行测量。分别通过高度尺测量、全站仪扫描以及位移计测量得到每一个测点的数据。
根据全站仪、位移计和高度尺测量的数据点建立位移曲线图,如图7所示。通过4次加载后三者数据具有较好的一致性,位移计与全站仪均能够很好的反映位移变化。高度尺的数据点作为基准数据记为D,位移计与全站仪的数据点分别记为S1和S2。全站仪和位移计测量值与高度尺测量值之差即为误差值记为β,全站仪测量的最大误差为-0.862 mm,位移计测量的最大误差为0.79 mm。记每次加载后测量5个数据点的误差分别为β1,β2,…,β5,测量值的均方根误差如下:
其中,λ表示数据偏离实际值的程度,λ越小表示精度越高,所以用λ作为评判测量精度的标准。分别求出4次加载后全站仪与位移计测量数据点的均方根误差取平均值为λ1=0.512 4,λ2=0.432 5。根据本文试验结果分析,可以得出位移计数据误差普遍比全站仪测量数据小,说明在该实验场景下本文设计的位移计比全站仪测量位移变化精度更高。
4结束语
本文基于MEMS加速度计与磁力计设计了一种能够进行扭转校正的位移计。对监测节的硬件电路与结构进行了精简化设计。实现了位移计校准扭转误差的姿态解算,通过位移计垂直安装测量水平位移的模拟试验,在10个角度下的扭转校正中,水平位移X轴最大误差为1.79 mm,Y轴最大误差-1.70 mm。X轴的平均误差为0.25 mm,Y轴的平均误差为-0.02 mm。水平安装测量沉降位移最大误差为0.79 mm,4次加载后均方根误差均值为0.432 5 mm。试验结果表明本文所提出的方法具有较好的测量精度,能够同时满足基坑沉降与水平位移监测的需求。
参考文献:
[1]部门山东省建设厅.建筑基坑工程监测技术规范[M].北京:中国计划出版社,2009.
[2]卢冬冬.深基坑支护技术的发展现状及展望[J].安徽建筑,2022,29(6):113-114.
[3]刘立云,郭萍,庞明涛.全站仪工作原理及在某渠道工程测量中的应用[J].河南水利与南水北调,2016(6):46-47.
[4]唐文佳,吕雨生,何旭东,等.钻孔测斜仪在探测滑坡滑面中的应用[J].资源信息与工程,2019,34(4):140-142.
[5]孙泽信,段举举.某深基坑工程全自动化监测技术的应用[J].勘察科学技术,2022(3):52-56.
[6]许佳宾,黄鹤.三维激光扫描技术在高危边坡监测中的应用[J].北京测绘,2017(4):76-79.
[7]董文文,朱鸿鹄,孙义杰,等.边坡变形监测技术现状及新进展[J].工程地质学报,2016,24(6):1088-1095.
[8]刘媛.浅析沥青混凝土心墙坝超长阵列式位移计变形监测施工技术[J].水电站设计,2021(3):37.
[9]ABDOUN T,BENNETT V,DANISCH L,et al.Real-Time Con⁃struction Monitoring with a Wireless Shape-Acceleration Array System[J].Geotechnical Special Publication,2008(179):533-540.
[10]HENDRY M T,MARTINC D,BARBOUR S L.Measurement of cyclic response of railway embankments and underlying soft peat foundations to heavy axle loads[J].Canadian Geotechnical Journal,2013,50(5):467-480.
[11]卞晓卫,田保明,彭浩,等.SAA阵列式位移计在面板挠度监测中的应用[J].水利规划与设计,2022(12):134-138.
[12]冉建西,沈玮,王恩辉.阵列式位移计在盾构隧洞施工监测中的应用[J].水利技术监督,2022(1):5-8,72.
[13]杨春旭.库区滑坡体变形阵列位移传感监测技术[J].大坝与安全,2021(4):58-61,70.
[14]陈贺,李亚军,房锐,等.滑坡深部位移监测新技术及预警预报研究[J].岩石力学与工程学报,2015,34(S2):4063-4070.
[15]孙虹虹,邓兴升.边坡监测中测斜误差与精度分析[J].水电自动化与大坝监测,2015,39(1):26-28,51.
[16]郑天翱,蔡德所,陈声震,等.基于MEMS柔性测斜仪研制与性能试验研究[J].中国农村水利水电,2020(7):190-195.
[17]石永强,李雨菲,车录锋.基于MEMS加速度计阵列的测斜仪设计[J].传感器与微系统,2020,39(9):66-68,72.
[18]陈声震.MEMS惯性测量技术研究与工程应用[D].宜昌:三峡大学,2021.
[19]李国儒,康建峰.边坡变形柔性测斜仪自动化监测系统在水利工程中的应用[J].水利水电快报,2023,44(3):107-110,116.
[20]田方澍.基于多传感器的多旋翼无人机导航解算方法研究[D].哈尔滨:哈尔滨工业大学,2017.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网! 文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/77222.html