SCI论文(www.lunwensci.com)
摘要 :针对山药收获机械自动化占比低 、工作效率低 、收获损伤率高并且需要人工辅助作业 、污染环境等问题, 结合山药生长环 境和收获实际情况, 通过对山药数据的分析 、挖取方案的比较与选择, 设计开发出一款可用于山药抓取 、收集的机器 。该机器 主要由挖掘装置 、去泥装置 、打捆装置以及整体机架组成 。使用 SolidWorks 软件对机器的各个零件进行建模, 并利用有限元软件 ANSYS 对夹爪以及车架进行应力分析, 发现在 100 N 的载荷作用下, 夹爪最大应力为 225.5 kPa, 最大形变量为 0.78 mm, 车架最大 应力为 158.5 Pa, 最大形变量为 1.966 9 mm, 应力和形变均在允许范围 。通过有限元分析结果, 证实了结构的可行性。
Research of Self-propelled Chinese Yam Harvesting Machine and Its Key Parts
Yan Zheng, Yang Baojian, Cao Yunlong, Li Bin
(Department of Intelligent Manufacturing, Wuyi University, Jiangmen, Guangdong 529020. China)
Abstract: For the problems of low proportion of yam harvesting machinery, low efficiency, high rate of harvesting damage, manual assisted operation and environmental pollution, a machine that can be used for yam harvesting is designed and developed . The machine is mainly composed of excavation device, dredging device, baling device and overall frame. The machine is modeled by SolidWorks software and the stresses of the jaws and frame are analyzed by the finite element software ANSYS . It is found that the maximum stress of the jaws is 225.5 kPa and the maximum deformation is 0.78 mm under a load of 100 N, and the maximum stress of the frame is 158.5 Pa and the maximum deformation is 1.966 9 mm. The stress and deformation are within the allowable range. After the results of finite element analysis, the feasibility of the structure is confirmed.
Key words: excavation device; yam; baling device; dredging device; finite element analysis
0 引言
目前, 山药这些生长在泥土深度的农作物由于市场 巨大需求, 农户通过种植山药, 与采购商进行买卖, 提 高家里带来经济收入, 种植规模逐年增大, 但是由于山 药成熟后长在深 1 ~ 1.5 m 左右的土壤环境, 侧根沿着泥 土横向生长, 导致社会上的山药收获机械自动化占比低、 工作效率低 、收获损伤率高并且需要人工辅助作业, 环 境污染等问题[1-3]。
农业技术与农机在农业生产中起到很重要的作用, 机械化农业劳作可以提高农作物的生产效率, 优化农业 产业结构, 减小农村劳动力外流带来的劳动力不足的问 题并减轻农民劳动强度, 是现代农业发展的主要方向[4]。 因此传统农业开始向机械化方向发展, 而机械化随着时 代的发展到了如今正向着智能化和无人化发展[5-6]。
随着生活水平的提高, 山药的需求逐渐增大, 从而 吸引大量种植户种植 。然而直到现在, 山药收获仍采用 手工操作, 导致效率低, 特别是到了山药收获的季节, 此问题更为突出 。因此, 本文设计的自走式山药采收机集采取 、去泥 、打捆一体化作业。
1 自走式山药采收机总体方案设计
1.1 整机设计原则
本文设计的自走式山药采收机的工作对象是广东省 阳江市地区所种植的山药, 垂直生长, 长可达 1 m, 直 径 20 ~ 30 mm, 山药生长的土壤是沙质的[7] 。设计一种能 自动将山药挖出泥土并实现土壤分离的机器, 提高山药的 收获效率, 保障以山药为中心的相关行业能够快速发展, 提高山药的附加价值, 提高种植山药的农户每年收益[8] 。
1.2 工作原理
自走式山药采收机整机的工作运动通过车架上方的 运功相机实现路径规划, 利用激光雷达进行避障, 电机 驱动后轮来带动整机的运动; 山药是等距离种植, 整机 停止运动, 挖掘装置上的摄像机捕捉山药的位置, 调整 挖掘装置的位置, 控制竖直方向的电机工作, 通过联轴 器带动丝杆运动进而带动采取装置的运动, 挖掘装置下 降到设定的高度, 采取装置中的夹爪进入泥土中并夹取 山药; 挖掘装置整体上升, 并通过横向的电机丝杆传动向去泥装置方向移动到滑道位置上方, 夹爪放开山药, 山药在去泥装置中两个压送轮的作用下通过滚筒刷, 实 现山药身上泥土的去除; 通过挡泥板, 在去泥装置的输 送下滑到输送带上, 输送带旁边的传感器接受到信号后, 后面输送带挡板工作, 输送带工作, 输送山药到后面挡 板进行堆积对齐; 当山药堆积到一定数量, 传感器收到 信号, 打捆装置开始工作, 对堆积好的山药进行保鲜膜 捆绕, 捆绕到山药固定后, 气缸推动电热叉前进, 实现 保鲜膜的熔断, 打捆装置停止, 后面挡板回退, 输送带 运送堆积好的山药前进, 前进一定距离后, 输送带停止 工作, 打捆装置实现二段打捆, 最后人工回收打捆好的 山药。
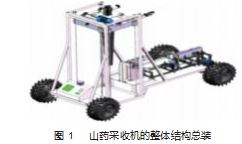
1.3 总体结构
阳江市地区山药的种植模式为等距种植, 山药垂直 生长, 根据以上数据, 本次设计的主要内容: ( 1 ) 山药 采收机的整体结构设计; (2 ) 抓取山药装置的设计; (3 ) 去泥装置的设计; (4 ) 打捆收集装置的设计 。其总装图 如图 1 所示。
2 各功能装置结构设计
2.1 挖取装置的设计
2. 1. 1 基本要求
( 1 ) 具有适当的夹紧力;
( 2 ) 夹爪具有 20 ~ 25 mm 的开闭范围, 能完全夹持 长 1 m 左右的山药;
( 3 ) 保证山药在夹爪内的夹持精度;
( 4 ) 要求结构紧凑, 减小泥土的阻力, 效率高。
2. 1.2 挖取方案对比和分析
采收装置作为山药采收机的关键部分之一, 夹持方 式的选择十分重要 。现代工业通常采用机械手爪的方式 实现人手功能, 而农业机械也可以借鉴现代工业的机械 手爪方案, 确定适合自身的夹持方式 。现工业机器人的 末端执行器分为 3 类: 机械夹爪; 吸附式取料手, 即磁 力吸盘; 仿生手[8] 。如表 1 所示。
综上所述, 结合山药的形状及大小考虑, 采取装置 参考机械夹爪的夹持方式 。机械爪通常有 4 种操作方式: 气动 、液压 、电动和电磁 。气动卡爪的应用范围很广, 其特点是操作简单, 运行成本低, 容易维修, 但爪钳位置的控制比较困难 。液压控制夹爪成本更昂贵 。 电机驱 动的夹爪很多优点, 其中最重要的优点是控制夹爪打开 和关闭的电动机可以与其他控制装置共享系统 。 电磁手 爪控制信号简单, 但是电磁夹紧力与爪钳行程有关, 只 用在开合距离小的场合 。依据小型化 、经济型山药采收 机的设计要素, 故选用电动机控制手爪。
2. 1.3 夹爪结构及尺寸确定
根据夹持对象的形状的不同, 机械手爪可分为多种 类型, 有平行连杆两爪 、齿轮齿条两爪 、三爪 、连杆结 构四爪 、柔性自适应手爪等, 参考以上各类型的机械手 爪的特点, 选定机械手爪类型为平行式连杆两爪型, 确 定自走式山药采收机采取装置所需的数据和要求, 具体 如下:
( 1 ) 采用平行夹爪模式, 挖取山药动作为夹紧-放开;
( 2 ) 抓紧的山药直径为 25 mm, 长度 1 m, 放松时夹 爪最大距离 40 mm;
( 3 ) 工件材质为 45 钢;
( 4 ) 夹爪靠连杆 、滑块 、丝杆和联轴器连接, 由伺 服电机提供动力;
( 5 ) 最大限度减少泥土的阻力。
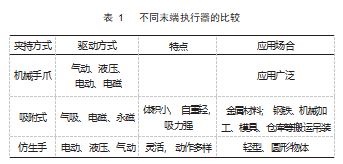
综合以上设计参数要求, 夹爪结构设计如图 2 所示。 自走式山药采收机的夹爪结构由电机 、夹爪 、连杆 、滑 块 、运动相机等组成, 夹爪在电机的驱动下, 螺杆连带 螺纹块上下运动, 螺纹块带动连接连杆, 滑块协同手爪 在圆柱上开合运动, 使手爪实现夹紧-放松, 在杠杆的 作用下产生夹紧山药的夹紧力。
2.2 去泥装置的设计
2.2. 1 整体结构
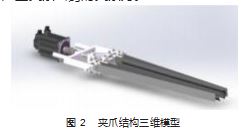
去泥装置正视图如图 3 所示 。去泥装置由压送轮 、电机 、机架 、滚筒刷 、传动轴 、带轮等组成。
2.2.2 工作原理
去泥装置的传动方式是带轮传动和齿轮传动, 主动 轴主要工作原理是当山药被采取装置的夹爪收获后放到 去泥装置前面的滑道中, 山药由于重力的作用进入压送 轮中, 从动轴在两个滚筒刷的作用下, 山药身上附着的 泥土会被慢慢刷掉, 从而实现去泥的功能。
2.3 打捆收集装置的设计
2.3. 1 整体结构
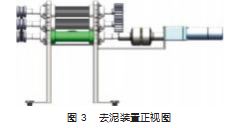
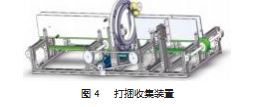
打捆收集装置三维模型如图 4 所示 。打捆收集装置 由电机 、皮带轮 、皮带 、传送带 、转动圆盘 、传动轴、 轴承座 、电动气缸等组成。
打捆装置由打捆圆盘结构 、机架结构 、传动结构等 几个主要部件组成。
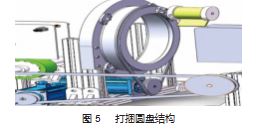
( 1 ) 打捆圆盘结构
打捆圆盘结构是整个打捆装置的核心, 电机驱动带 轮实现圆盘的转动, 而打捆塑料膜随着圆盘的转动, 实 现山药的打捆 。如图 5 所示。
( 2 ) 机架结构
机架主要由铝型材拼接组成, 主要用于打捆圆盘架 的安装, 传动轴和传动轴承座的安装, 气缸与挡板的安 装, 承受整个打捆装置的主要重量。
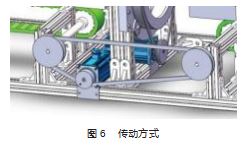
( 3 ) 传动结构
打捆装置的传动为带轮传动, 两个电机分别带动打 捆圆盘转动 、同步带的转动, 带轮传动使打捆过程更加 高效 、稳定 。如图 6 所示。
2.3.2 打捆方式的确定
山药的长度为 1 ~ 1.2 m 之间, 通过考虑到捆扎的稳定性, 常捆扎的道数最少为两道 。山药的形状和钢管相 类似, 因此参考钢管的圆形 、矩形 、六角形捆扎包装方 式[9], 选择适合采收机的收集方式。
六角形包装方式最稳定, 堆放时受力面积较大; 而 矩形包装方式不如六角形包装稳定, 但是堆放时受力面 积更大; 圆形包装的稳定性和堆放受力性是最小的 。考 虑到采收机运动的振动频率和堆放的简便性等, 故选用 矩形式的打捆方式。
3 挖取装置相关分析计算
3.1 夹持力
夹爪设计的最重要基础是夹爪对山药的夹紧力, 必须 进行受力分析和计算。通常情况下, 夹紧力必须大于山药由 于重力而产生的静态负荷, 以使山药保持安全的夹紧位置。
夹爪对山药的夹紧力计算公式:
式中: K1 为安全系数, 由机械手的工艺及设计要求确 定, 通常取 1.2 ~ 2.0. 本文取 1.5; K2 为工件情况系数; K3 为方位系数; G 为被抓取山药的重量, 取 G = 4.9 N 。 其中
式中: a 为运送山药过程的加速度绝对值, 取 a=0.02 m/s2; g 为重力加速度 g=9.8 m/s2.
式中:f为摩擦因数; θ 为夹爪角, 此处粗略计算 K3 = 4. 由 式 ( 1 ) 求 得 夹 紧 力 FN, 经 计 算 可 知, FN =29.45 N, 故取整 FN =30 N。
3.2 挖取装置的驱动
3.2. 1 驱动夹爪的电机计算选择
采收装置的整个运动是依靠电动机与丝杆机构的配合 来完成采取工作, 因此为确保山药采收机能正常工作, 需 要选择恰当的电机, 山药采收机才能安全可靠地运行。依 据功率、转速、防护形式等参数, 选择合适的电动机[10]。直 流电机控制夹爪的夹紧-松开的动作。因此需要分开计算不 同工作的电动机所需要的参数, 这样才能选择合适、可靠、 经济的电动机 。电动机的转矩 、功率可按下列公式计算:
式中: P 为电机传动到夹爪的功率, W; F 为夹爪夹紧力, N; v 为夹爪开合的速度, m/s; P电 为电机的输出功率, W; η为联轴器的效率。
夹爪开合的速度设定为 0.1 m/s, 工业机械爪一般选用 1 500 r/min 的电动机, 查阅资料得 η=0.99. 根据已知的工作要求和条件, 根据式 ( 4) ~ ( 6) 计算可知:
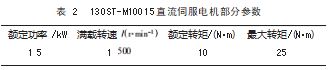
经过以上计算, 在确定电动机的功率 、转速和扭矩时, 应考虑电动机的尺寸 、安装形式 、质量等参数, 拟选择 130 系列直流伺服电机 。部分参数如表 2所示 。
3.2.2 水平移动丝杆的计算选择
( 1) 确定直线滚珠丝杆副的导程
式中: vmax 为滚珠丝杆副最大移动速度, 取 vmax=1 m/min;n 为电机的最高转速, 取 nmax=1 000 r/min; i 为传动比,取 i=1.
经综合考虑, 选取 Ph=5 mm。
( 2) 选择支撑方式
因为升降平台在左右移动中, 需要精准识别山药的位置, 速度适中, 根据中等转速、刚度、精度等要求, 故选用一边固定, 另一边支撑的支撑方式 。
( 3) 相关参数计算
滚珠丝杆在水平移动时的载荷滚珠丝杆在工作时, 会受到导轨的摩擦力、移动负载和加速阻力, 其计算公式为:
式中: µ 为摩擦因数, 一般滚动导轨取µ=0.05; α 为加速 度, mm/s2 。
求出负载转矩, 其计算公式为:
式中: η 为机械效率, 一般取 η=0.9.
计算得 F1 = 7.5 N, 将结果代入式 ( 9), 可计算出T1 = 0.006 65 N ⋅ m
( 4) 确定滚珠丝杆最大轴向允许载荷
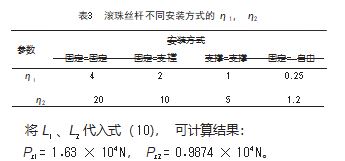
查阅资料, 得出丝杆沟槽的最小直径 Dr=17.5 mm,根据滚珠轴承的安装方式, 得知其相关系数 η1=2. η2= 10.根据采收机的车架的尺寸, 暂定丝杆的安装间距 L1=758 mm, L2=975 mm。则有:
式中: Pz 为最大轴向载荷允许, N; η2 与安装方式有关,如表 3 所示; Dr 为滚珠丝杆沟槽最小直径, mm; L 为滚珠丝杆安装间距, mm。
( 5) 确定滚珠丝杆最大轴向屈服强度 计算其屈服强度公式如下:
式中: Pq 为滚珠丝杆最大轴向屈服强度, N; Dr 为滚珠 丝杆沟槽最小直径, mm; σ 为丝杆材料的允许拉伸压缩 应力, 取 σ = 147 N/mm2.
经计算可知, Pq = 3.45 × 104 N, 丝杆的实际最大轴 向载荷小于最大轴向屈服强度, 可靠 。
( 6) 确定电机最高转速
转速计算公式如下:
式中: nmax为电机实际最高转速, r/mm; vmax为最大移动速度, m/min; Ph 为滚珠丝杆导程, mm; i为传动比, 取i=1.经计算可知, nmax = 200 r/ min。
( 7) 确定滚珠丝杆型号
选用THK公司的循环器式, 采用固定-支撑的支撑方式。
4 车架和夹爪的有限元分析
ANSYS 的结构静力学分析通过对除惯性和阻尼效应以外的外载荷求解结构引起的位移 、应力 、应变和力[11]。
以本设计中的夹爪和车架为例, 具体如下。
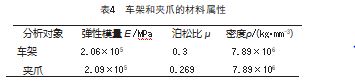
( 1) 选定材料车架的结构设计采用工程上常用的结 构钢, 夹爪由于其高强度工作, 因此采用 45钢 。车架和 夹爪的材料属性如表 4所示。
( 2) 使用 SolidWorks 软 件 完 成 车 架 和 夹 爪 模 型 的 建立 。
( 3) 按照需求划分网格 ANSYS有 4种划分网格方式:
四面体网格 、扫掠方法划分网格 、 自动划分法划分网格、 CFX网格方法等【12-14】ANSYS Workbench 可以提供自动网格划分的解决方案,
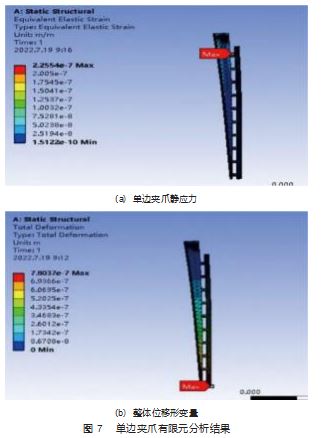
( 4 ) 添加载荷和约束条件夹爪的分析只考虑夹爪空 中夹持山药时载荷对夹爪的影响, 所以添加的载荷为夹爪 圆弧面所需要的夹持力和山药的重力, 由 3.2 节的计算得 知夹持力为 19.6 N, 一般山药重力为4.9 N, 夹爪依靠连杆 实现平行运动, 因此对安装孔以及安装面添加固定约束。
单边夹爪分析结果如图 7 所示, 由图可知, 单边夹 爪在夹持山药的状态下, 最大应力出现在圆弧夹持面的 第一个焊接处, 此处的应力为 0.225 5 MPa, 这里为连杆 和电机驱动 、夹爪挖取山药的合发力点, 最大应力值出 现在这合理 。零件的最大形变出现在圆弧夹持面的刀刃 处, 最大形变量为 0.78 mm, 整体形变量较小。
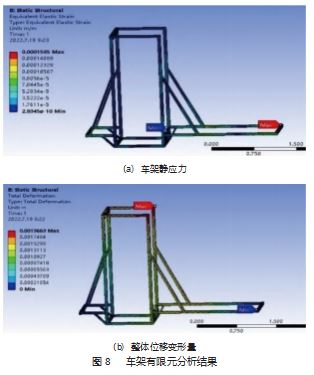
车架分析结果如图 8 所示, 分析结果可知, 车架主要 收到各零件的重力和, 最大应力出现在前横梁与斜支撑横 交接处, 此处的应力为158.5 Pa, 最大形变出现在斜支撑和 竖梁连接处, 最大形变量为1.966 9 mm, 整体形变量较小。
5 结束语
根据山药机收获的要求的工作参数和功能, 对山药 采收机进行方案设计, 山药采收机根据功能划分为挖取 装置 、去泥装置和打捆装置, 其中打捆装置可需实现收 集 、打捆 、运输 3 个功能, 对各个装置进行结构设计 。 从用 SolidWorks 软件完成了山药采收机的建模与装配, 对关键零部件进行有限元分析, 由结果数据可得出关键 零件的性能符合结构设计要求 。但依然停留在理论上的 设计, 未来还需要进行实践来验证 。在乡村振兴战略和智慧型农业的发展趋势下, 智能化 、小型化 、经济化依 然是山药收获机的主要设计方向[15]。
参考文献:
[1] 于万胜 . 山药收获机的设计与研究[D]. 天津:河北工业大学,2014.
[2] 余文慧,李诚永, 张鑫,等 . 衢州市山药产业发展现状及对策[J]. 农业科技通讯,2021(12):41-42.
[3] 冯晓静,杨欣,刘洪杰,等 . 麻山药收获机械化技术现状与对策 [J]. 中国农机化学报,2017.38(4):113- 116
[4] 糜南宏 . 山药 、牛蒡种植 、收获机械及全国种植面积的分布 状况[J]. 江苏农机化,2006(2):25-26.
[5] 李晓龙,徐同成,臧传江,等 . 山药加工产业发展现状及存在的 问题探讨[J]. 种子科技,2021.39(4):127- 128.
[6] 王明安,李作伟,刘智梅 . 山药栽培要点[J].云南农业,2022(1):65-66.
[7] 吴朗平,付传琼 . 山药限根定向栽培技术[J]. 农村新技术,2021 (1):8-9.
[8] 王革新 . 紫山药在宜宾市翠屏区栽培技术研究[D]. 雅安:四川 农业大学,2018.
[9] 计时鸣,黄希欢 . 工业机器人技术的发展与应用综述[J]. 机电 工程,2015.32(1):1- 13.
[10] 郑爽,邓干然,崔振德,等 . 高地隙履带自走式菠萝采收车的设 计[J]. 现代农业装备,2020.41(6):29-32.
[11] 濮良贵, 陈国定, 吴立言,等[M]. 10 版 . 机械设计 . 北京:高等教 育出社,2018.
[12] 黄志刚,许玢 .ANSYS19.0 有限元分析完全自学手册[M]. 1 版 . 北京:人民邮电出版社,2015.
[13] 谢龙汉 ,蔡思祺 .ANSYS Workbench17.0 有限元分析及仿真 [M].2 版 . 北京:电子工业出版社,2017.
[14] 李军,李勇 . 基于 ANSYS 的某型农用车架有限元分析试验综 述[J]. 汽车零部件,2022(3):94-97.
[15] 贾新旺,孙运莲 . 大名山药种植现状问题及发展对策[J]. 河北 农业,2016(6):22-25.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/65814.html