SCI论文(www.lunwensci.com)
摘要:针对电池长期使用过程中采样误差会发生变化的情况, 提出使用自适应在线估算误差的方法, 最大程度地发挥卡尔曼滤波 的在线 SOC 修正能力。首先以二阶等效电路模型为基础, 对三元材料 (NCM) 锂离子电池进行多个 SOC 点的放电静置实验。之后 使用 MATLAB 对实验数据进行参数拟合, 得出电池的全 SOC 工况 (0%~100%) 的伏安特性模型。实验后所得数据表明此模型的精 度较高。在此基础之上, 使用扩展卡尔曼滤波 ( EKF ) 对 SOC 估计进行了优化。针对电动车行驶过程中传感器的误差不可知, 并 且会发生突变的情况, 提出一种基于信息相关的自适应扩展卡尔曼滤波 (AEKF) 来实时估计过程中的测量噪声。仿真结果表明, 采用 AEKF 方法对动态电池模型进行 SOC 估计可以适应多种噪声, 可有效降低电动汽车行驶时电池管理系统所受到的未知噪声干 扰的影响, 在采样误差未知且可变的情况下, SOC 估计精度高于EKF 方法, 且具有较好的鲁棒性。
Using Adaptive Extended Kalman Filter to Estimate SOC under Different
Noise Scenarios
Chen Mingliang1. Zhu Shiqing2. Wang Luyang1
( 1. Neusoft Reach Automotive Technology Co., Ltd., Shenyang 110179. China;
2. Library of University of Science and Technology Liaoning, Anshan, Liaoning 114051. China)
Abstract: During long-time battery usage, sampling error can vary on amplitude, an adaptive method is proposed for online sampling error estimating to maximize SOC correction ability of EKF method, based on equivalent circuit model, NCM lithium-ion battery is discharged and rest under multiple SOC points. Then MATLAB is used to estimate parameters of the battery model, and a dynamic battery model is achieved under whole SOC working condition (0%~100% SOC). Experiment data has proven the model has high accuracy. Base on previous work, extended Kalman filter (EKF) is used to do real-time SOC estimation. As sensors noise of electric vehicle is unknown and can be varied during driving, an innovation-based adaptive extended Kalman filter (AEKF) method is proposed to estimate the measurement noise in real time . Simulation results have shown using AEKF method can properly estimate SOC of a dynamic battery modelunder different types of noise, the method have great potential to reduce noise interference to battery management system (BMS) during driving, AEKF has a better accuracy and provide robustness when battery sampling error is known and varying .
Key words: adaptive Kalman filter; noise; dynamic lithium-ion model; SOC estimation
0 引言
进入 21 世纪后, 随着石油能源供给与地缘政治因素 关系的加强, 各国制订了减少碳排放的目标要求, 新能 源汽车正受到人们的广泛认同。根据 IEA (国际能源署) 2021 年发布的 《全球电动汽车展望 2021》, 中性预测目 标到 2030 年, 全球电动汽车销量在 2 500 万辆左右, 全 球市场的渗透率在 10% 左右[1]。现阶段电动车的主要技 术瓶颈还是在充电基础建设和续航里程。刘洋和董学 锋[2]通过线性回归得出 2021 年我国年度电动乘用车平均 续驶里程达到 430 km, 但仍然无法满足长距离省级出 行, 加之基础充电设施建设的不健全, 充电时间过长, 很难说服更多消费者选择电动汽车。所以推广电动车要先从增加续航里程着手。延长电动车的续航里程主要 可从两点突破: ( 1) 开发新材料从而制造出能量密度 更高的电池, 现在市场上能量密度最大的商业电池之一 为 Samsung SDI 生产的 NCM (Nichel-Cobalt-Manganese, 镍钴 锰) 三 元 材 料 锂 离 子 电 池, 其 能 量 密 度 可 达 200 Wh/kg, 但还是很大程度上小于汽油的能量密度约 10 000 Wh/kg, 且 电 池 材 料 在 短 期 内 难 以 实 现 突 破; ( 2) 采用更好的电池管理策略, 更有效地利用电池的电 量, 电池管理系统 (BMS) 是电动车控制电池充放电的 电子单元, 如果 BMS 能够使用更为精确的 SOC 估计方 法, 就可以使电动车在更大的 SOC 范围内行驶, 也就是 从另一种角度增加了电动车的续航里程。
当前主要的 SOC 估计算法可分 3 种: (1) 根据单一 物理值对应计算电池 SOC值; ( 2) 使用大量准确数据学 习并得到 SOC的模糊算法; ( 3) 基于电池模型, 采用滤 波算法实时计算电池 SOC 值。
第一类方法主要有安时积分法 (AH) 和开路电压 法。安时积分法使用电流关于时间的积分计算出电池的 使用量, 但这种方法无法估计 SOC 的起始值, 且会对电 流的误差进行积分运算, 并不能修正引入的误差。开路 电压法使用 SOC-OCV 对应的曲线来估计电池的 SOC, 这 种方法精度比较高, 但前提需要电池长时间的静置, 使 电池的开路电压趋于稳定, 所以在车辆行驶过程中无法 应用此方法。实际应用中, 常将两种方法结合使用估计 SOC, 但估计精度不可控。
第二类方法主要使用神经网络[3-4]。这一类方法不需 要提前知道电池的模型, 但需要大量准确的数据进行学 习。实际应用中准确的 SOC 值获取十分困难, 并且一个 错误的数据就有可能使训练的模型失去意义。
第三类方法是基于模型的估计方法, 并利用数学方 法进行滤波估计。主要的滤波方法有卡尔曼滤波法[5-6]。 卡尔曼滤波在航天观测方面的应用十分广泛, 在长时间 的应用过程中其高效性也得到了证明。对于线性模型, 在系统误差和测量误差已知并符合高斯分布的前提下, 卡尔曼滤波会给出唯一的统计学意义上的最优解。由于 电池模型中有很大的非线性, 这也使电池的 SOC 估计要 使用扩展卡尔曼滤波 (Extended Kalman Filter, EKF ), 文献[4-5]中描述了使用 EKF 进行 SOC 估计的策略。
在实际车辆行驶过程中电压和电流的测量都会受到 各种因素的影响, 如电磁环境、环境温度、行驶时间等 都会影响测量的准确度。考虑到电池模型的非线性, 噪 声不确定, 且计算能力受限, 所以本文提出使用基于信 息相关的自适应方法来实时估计过程中的测量噪声, 从 而改进 EKF 对 SOC 的估计, 使滤波算法满足多种噪声下 的使用。
1 动态电池模型的建立
本文使用的电池为 Samsung SDI 生产的 94 Ah 锂离子 电 池, 正 极 材 料 为 NCM 三 元 材 料, 负 极 为 石 墨 。 在 25 ℃环境下的截止电压为 2.5 ~4.2 V。
实验环境: 实验在恒温箱中, 在 25 ℃恒温条件下进 行放电。
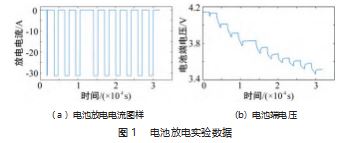
实验过程: 首先对电池进行容量定标。将电池以先 恒流再恒压 (CCCV) 的方式放电、充电、放电。最后一 次放电记录电池放出的总安时为 97.605 Ah, 高于 94 Ah 的标量, 说明电池符合标准。之后将电池以 CCCV 方式 充满电并且静置 10 h。再以图 1 ( a ) 中的电流图形放电, 放电电流为 1/3C, 静置时间大于 30 min。同时也记录下 电池两端的端电压, 其变化情况如图 1 (b) 所示。
电池模型主要有基于电池电化学公式的模型和等效 电路模型。由于电化学模型建模过程复杂, 计算量大, 精度较大, 一般电池生产厂商会采用电化学模型建模。 本文采用等效电路模型来模拟电池。等效电路模型是用 各种电子元件来模拟电池的伏安特性, 电池的伏安特性 可主要分为以下 3 种:
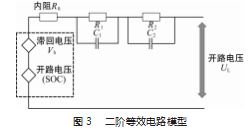
( 1) 内阻分压现象, 电源开关之后电压会呈阶跃式 下降, 这是由电池内阻 R0 造成的。
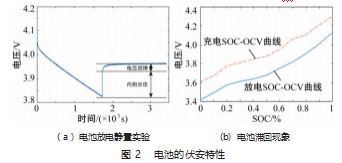
( 2) 电池极化效应 (电压回弹现象, 如图 2 ( a ) 所 示), 负载电压的改变速度会随时间变化而减小, 由多个 Rp 、Cp 振荡电路模拟。
( 3) 电压滞回现象[7], 如图 2 (b) 所示, 充电平衡 的电压会略高于放电平衡的电压。这一电压差由 Vh 表示。
现象产生的化学原因: 电池充放电过程就是锂离子 从晶体状锂离子化合物中脱出嵌入的过程。为适应这一 相变,晶体会产生一定的压力和张力。这种力以能量的形 式储存在晶体中, 所以有能量的滞回。实际使用中 BMS 厂商一般选择放电 SOC-OCV 曲线作为电池电压和 SOC 之间的对照关系, 因为用户更关注放电时的 SOC 变化。
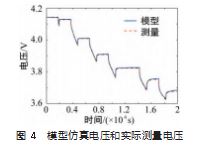
参照 Huria T 等[8]所建立的 MATLAB 模型, 为满足仿 真时能够模拟出上述 3 种伏安特性, 本文构造了如图 3 所 示的二阶等效电路模型, 并根据图 1 中的电压和电流特 性, 拟合出实验电池的模型参数 (R0 、R1 、R2 、C1 、C2 等)。对比模型仿真得到的电压和实际测量所得到的电压, 比较结果如图 4所示, 可以看出拟合出的模型精度 比较高。
2 SOC估计算法设计
动力电池的 SOC估计对算法的实时性需求很高, 且 计算能力受到环境的一定限制, 所以选择卡尔曼滤波为 SOC估计的基础。
2.1 卡尔曼滤波
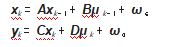
假设一个线性系统的状态量为 xk, 测量量为 yk, 输 入量为 μk 。ωs 和 ωo 分别为过程误差和测量误差的方差, 二者需满足高斯分布。则有系统过程, 测量公式:
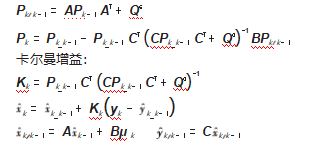
假设 Pk - 1 为 xk - 1 在已知 y1 ~yk - 1 时的协方差, Pkk - 1 为 xk 在已知 y1 ~yk - 1 时的协方差, Qs 为 ω s 过程的协方差, Qo 为 ω o 过程的协方差, Kk 为卡尔曼增益。以下为卡尔曼 滤波的迭代公式:
2.2 扩展卡尔曼滤波 (EKF)
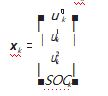
由于标准卡尔曼滤波只适用于线性模型估计, 而电 池模型是非线性的, 在非线性的条件下, 可以使用扩展 卡尔曼滤波算法。本文建立的是是二阶戴维南电池模型,所采用的状态量 xk 为一个 4×1 的矩阵。
式 中: u k(0) 、u k(1)、u k(2) 分 别 为 k 时 刻 等 效 电 路 上 电 阻 R0 、R2、R2 两端的电压; 测量量 yk 为电池端电压。
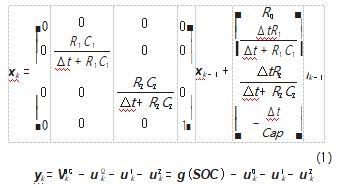
4个状态量分别为内阻两端电压、两个极效电阻两 端电压和电池的 SOC。对应系统方程和状态方程形式, 引入输入量电流 ik 和观测量电压 yk, Δt 为离散系统采样 周期, 电池的离散状态转换方程如式 (1) 所示[9]:
其中 Vk(OC) (电池开路电压) 与电池 SOC 之间的关系 为 OCV-SOC 曲线 g (⋅), 为非线性关系, 所以测量方程要采用泰勒展开来近似为线性关系:
在预估测量和过程误差之后就可以使用卡尔曼滤波 的迭代公式对电池的 SOC进行实时估计。
2.3 自适应卡尔曼滤波 (AEKF)
自适应卡尔曼滤波可分为多模型自适应估计 (Multi⁃ ple Model Adaptive Estimation) 和信息相关的自适应估计 ( Innovation-Based Adaptive Estimation) [10]。多模型自适应 估计[11-12]需要提前建立多个可能的滤波算法模型, 实际应 用中存在模型数量不够和计算量大的问题。本文使用基于 信息相关的自适应估计,也就是通过测量值的协方差来调 整 EKF过程中的预期噪声大小。自适应的定义比较宽泛, 本文的自适应定义为: 系统模型根据系统状态 (SOC) 动态 改变; 测量噪声大小根据测量数据的信息相关性实时调整。
假设 Vk 为测量值的观测和预期的差值:
AEKF 也就是在每次卡尔曼滤波迭代之后使用公式 ( 3) 来调整测量噪声大小。
3 不同噪声环境下的讨论
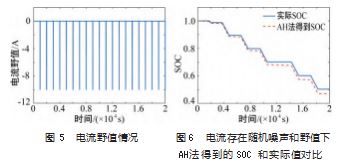
为验证不同 SOC估计算法在不同噪声环境下的表现 情况, 本文选择了安时法 (AH), 扩展卡尔曼滤波方法 ( EKF) 和自适应卡尔曼滤波方法 (AEKF) 来估计电池 的 SOC。噪声情况有正态分布随机噪声和野值, 其中野 值的模型如图 5所示, 为一个定周期的脉冲信号。实验 数据采用之前电池放电静置的电压电流数据。并依据拟 合 出 的 电 池 模 型 数 据, 在 Simulink 下 建 立 AH、EKF、 AEKF算法的模型。
3.1 电流存在随机噪声和野值
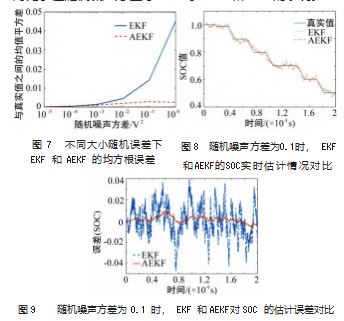
AH 法会对电流做时间上的积分。在电流测量过程存在随机噪声和野值的情况下, 积分过程会很大程度上 过滤掉均值为 0且符合正态分布的随机噪声。但 AH法无 法过滤掉电流野值造成的误差, 并且在后续的计算过程 中无法修正该误差。图 6 中 AH 法会累积野值造成的误 差, 使其偏离真实值。所以单一地使用 AH 法不适合复 杂的噪声情况, 特别是测量过程中存在有野值的情况。 3.2 电压测量只存在随机误差,电流测量无噪声在电压测量端增加一个随机噪声, 噪声的方差为 10-5~1. 对于 3~ 4 V 的电压测量相当于 0.08%~25% 误差 大小, EKF 所预测的测量误差方差设定为 10-4. 在过程 误差相同的情况下, 对比 EKF 和 AEKF所得到的 SOC 与 真实值的均方根误差 (RMS), RMS 值可反映一段时间 内估计 SOC 与实际值的拟合情况。图 7 说明 AEKF 在不 同的大小的随机误差下都能做到有效滤波, 且误差值在 合理范围内。当噪声方差越大时, AEKF 对比 EKF 的表 现越好。当噪声方差趋近于无穷大时, AEKF 可以等同 为 AH法, 这一点可以通过卡尔曼增益系数计算的方程 得出, 当 Qo 无穷大时, 卡尔曼增益系数趋近于 0.图 8~9 对比了在随机噪声方差为 0.1 时 AEKF 和 EKF 的表现。
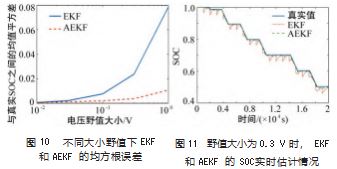
3.3 电压测量只存在野值,电流测量无噪声
电压野值模型周期与图5 中电流野值模型的周期相同, 改变电压野值的大小。图 10说明 AEKF在不同大小的电压野值情况下, 都能做到有效滤波, 且误差值在合理范围内。 当电压野值大小越大时, AEKF 对比 EKF 的表现越好。 图 11对比了在野值大小为 0.3 V 时 AEKF 和 EKF 的表现。
4 结束语
本文使用等效电路方法建立了一个动态电池模型, 并 总结了等效电路模型表征的电池特性。之后使用自适应扩 展卡尔曼滤波 (AEKF) 来估计电池的SOC, 并比较了在多 种噪声情况下 AH、EKF、AEKF 的表现。通过仿真得出结 论, 使用 AEKF在噪声不确定的情况下比 EKF 和 AH法有 更精确的 SOC估计, 且有更好的鲁棒性。本文对于电动汽 车 BMS采样误差长期变化情况下估计 SOC有实际的帮助。
参考文献:
[1] International Energy agency (IEA). Global Electric Vehicles Out⁃ look 2021 [EB/OL]. https://www. iea. org/events/global-electric- vehicles-outlook-2021. [2023-04-01].
[2] 刘洋,董学锋 . 电动乘用车能量密度及续驶里程 2020 年度报 告[J]. 汽车文摘,2021(11): 12-16.
[3] 陈果,黄祺尧,张志宏 .基于 Res-LSTM 网络的多元化电池剩余 容量实时预测[J]. 智慧电力,2022.50(7):29-36.
[4] 朱天航,吝毅,陈维刚 . 基于 CNN-BILSTM 混合网络的锂离子 电池荷电状态估计[J].信息技术与信息化,2022(8):148-151.
[5] 崔耕韬,江卫华,涂炜 .基于 EKF 算法的锂电池 SOC 估算策略 [J]. 电子技术应用,2021.47(3):36-39.
[6] 华迪,赵阳,王宇伟,等 .基于不同模型下 EKF 算法的锂离子电 池 SOC估计[J].机电产品开发与创新,2023.36(1):5-8.
[7] 宋凯,陈旭,成艾国 . 考虑温度影响和滞回效应的锂电池特性 建模[J]. 汽车工程,2019.41(3):334-339.
[8] Huria T, Ceraolo M, Gazzarri J, et al. High fidelity electrical mod⁃ el with thermal dependence for characterization and simulation of high power Lithium battery cells[C]//Electric Vehicle Confer⁃ ence (IEVC), Greenville SC: IEEE, 2012:1-8.
[9] 谭晓军 . 电动汽车动力电池管理系统设计[M]. 广州:中山大学 出版社,2011.
[10] Mohamed A H, Schwarz KP.Adaptive Kalman Filtering for INS/ GPS[J]. Journal of Geodesy, 1999. 73(4): 193-203.
[11] 何耀,张陈斌,刘兴涛,等 .基于信息融合的 LiFePO4 动力电池 组 SOC估计[J]. 控制与决策,2013.29(1): 188-192.
[12] Wang Y, Zhang C, Chen Z, et al. A method for state-of-charge estimation of Li-ion batteries based on multi-model switching strategy[J]. Applied Energy, 2015(137):427-434.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/65715.html