SCI论文(www.lunwensci.com)
摘要:为了提升外骨骼机器人的人机匹配性能, 提出了以表面肌电信号预测人体平地行走状态的方法 。预测模型选用 BP 神经网络 算法训练, 选取大腿肌肉群的股直肌 、股二头肌 、股内侧肌 、半腱肌作为采集对象, 使用肌电信号传感器采集表面肌电信号 。将 采集所得的表面肌电信号在 MATLAB 中进行预处理去噪后提取时域特征值和频域特征值用于BP 神经网络模型的训练 。将时域和频 域特征值分别作为 BP 神经网络的输入以及对应的人体平地行走 5 种相位状态作为输入进行实验 。在输入特征样本时, 采用 DE 算 法得出优化的样本种群进行 BP 神经网络模型的分类训练 。再抽取时域和频域特征值部分样本作为验证对象进行 K次交叉验证实 验 。实验结果表明, DE 算法优化后的 BP 神经网络模型分类识别准确率高达 86%, 明显高于单一特征样本的训练识别结果。
Lower Limb Motion Recognition Based on Surface EMG Signals
Zhang Yang1. Tan Xin2. Cheng Chuang1
( 1. School of Intelligent Manufacturing, Jianghan University, Wuhan 430056. China;
2. Department of Scientific Research, Jianghan University, Wuhan 430056. China)
Abstract: In order to improve the human-machine matching performance of exoskeleton robots, a method of predicting the flat walking state of the human body using surface EMG signals is proposed. The prediction model is trained by BP neural network algorithm, and the rectus femoris, biceps, medial femoris muscle, and semitendon muscle of the thigh muscle group are selected as the acquisition objects, and the EMG signal sensor is used to collect surface EMG signals. The collected surface EMG signals are preprocessed and denoised in MATLAB, and the time-domain feature values and frequency-domain feature values are extracted for the training of BP neural network model . The time-domain and frequency-domain eigenvalues are used as input to the BP neural network and the corresponding five phase states of human flat walking as inputs. When entering feature samples, the DE algorithm is used to obtain the optimized sample population for classification training of BP neural network model. Then some samples of the eigenvalues in the time domain and frequency domain are extracted as the verification objects for K cross-validation experiments. Experimental results show that the classification recognition accuracy of the BP neural network model optimized by the DE algorithm is as high as 86%, which is significantly higher than the training recognition result of a single feature sample .
Key words: exoskeleton robots; surface EMG signal; pattern recognition
0 引言
随着科技的飞速发展, 外骨骼机器人在医疗, 军事 和工业等领域的应用需求逐渐增加, 同时对外骨骼机器 人的研究也越来越深入[1] 。为了提升外骨骼机器人的人 机匹配性能, 提出了以表面肌电信号预测人体平地行走 状态的方法 。人体运动的本质是肌肉收缩的结果, 人体 的神经系统活动控制肌肉收缩从而产生生物电信号, 此 信号能更直接的反映人体运动中的状态[2]外骨骼机器人 实现其穿戴辅助运动的功能就需要识别感知人体的运动 状态并且准确预测人体要进行的下个动作[3]。
本文主要针对下肢平地行走运动模式进行研究, 提 取下肢行走时的表面肌电信号, 将平地行走时下肢的一 个运动周期划为 5 个相位, 采集表面肌电信号通过分类模型识别出人体行走运动中所处的相位状态 。本文提出 了一种基于表面肌电信号识别人体下肢运动状态的分析 方法, 结合 DE 算法将多种特征值融合通过 BP 神经网络 以表面肌电信号的时域特征信号和频域特征信号作为输 入, 以平地行走过程中 5 种相位状态作为输出, 建立表 面肌电信号和下肢运动状态的预测模型 。针对时域特征 值和频域特征值以及时域和频域特征值结合的特征矩阵 分别进行实验对比不同特征值对分类结果的准确性 。本 文的研究有助于提高下肢外骨骼机器人的控制精度 、准 确率和实时性, 使之贴合正常人平地行走的下肢运动状 态, 以提高下肢外骨骼机器人助力性能和适应能力。
1 信号采集
表 面 肌 电 信 号 (surface Electromyography, sEMG )是在肌肉收缩过程中产生与人体肌肉表面的电信号, 可 通过表面电极片测得 。表面肌电信号便于采集, 对人体 无创伤等优点, 在基于表面肌电信号的运动研究应用前 景广泛[4] 。肌肉的收缩受到中枢神经系统控制, 当动作 指令发出时, 会沿着神经系统产生电位差最终抵达肌肉 细胞 。因此可以利用表面肌电信号来对人体的运动意图 进行识别预测[5]。
1.1 步态划分
步态是人体在行走过程中呈现出来的姿态, 人在平 地行走过程中步态是呈周期性变化的 。人体步态相位周 期如图 1 所示, 行走的理想状态是左右足完全对称的, 单对右足来说可分为支撑相和摆动相[6] 。在一个循环周 期中支撑相占整个周期的 60%~62%, 摆动相占整个周期 的 38%~40%[7] 。对支撑和摆动相进一步细分, 支撑相可 分为: 支撑前期 (占整个周期的 10%~12%), 支撑中期 (占整个周期的 38%~40%), 支撑后期 (占整个周期的 10%~12%); 摆动相可分为: 摆动前期 (占整个周期的 18%~20%), 摆动后期 (占整个周期的 20%~22%) [8]。
1.2 sEMG 采集
本文主要对平地行走过程中的步态相位进行分析, 针对不同的步态相位确定在不同步态相位下的活跃肌肉 进行表面肌电信号的采集。
实验对象为健康的, 无肌肉 、骨骼以及其他运动系 统疾病的男性, 在平地上进行 1 m/s 的匀速行走运动, 同 时贴附肌电采集设备记录行走过程中的肌肉电信号 。肌 电采集设备如图 2 所示, 这是一款六通道的肌肉电采集 设备, 可以同时采集 6 块不同的肌肉 。在肌肉表面贴附 电极片连接输入电极将采集到的信号传入运算放大器与 滤波器中进行放大滤波处理, 处理后输出信号, 输出的 信号通过 USB 直接输出到电脑中, 生成电压随时间变化 的文本信号数据 。采集设备工作电压为 9 V, 采样频率 为 1 000 Hz, 电压信号放大倍数为 1 000 倍。
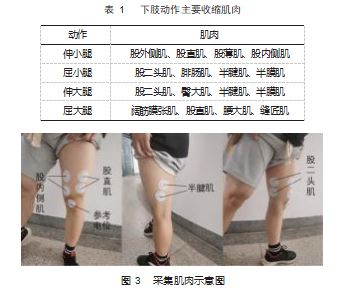
采集过程: 人的下肢肌肉可分为胯部肌 、大腿肌 、 小腿肌等[9] 。其中胯部肌的肌肉主要有阔筋膜张肌 、臀 大肌等; 大腿肌的肌肉主要有长收肌 、股直肌 、股二头 肌 、股内侧肌等; 小腿肌的肌肉主要有腓肠肌 、比目鱼 肌 、胫骨前肌等[10- 11] 。如表 1 所示, 下肢动作主要收缩 的肌肉为股二头肌 、股直肌 、股内侧肌 、半腱肌等[12]。 依据肌肉的位置 、面积和发挥的作用[13], 选择股直肌 、 股二头肌 、股内侧肌 、半腱肌, 其采集的方式如图 3 所示 。
2 表面肌电信号预处理
初步采集所得的表面肌电信号包含着所需的运动信息, 同时也包含着外界噪声, 设备自身以及人体自身等 各种干扰信号, 所以需要进行滤波处理 。采集所得的原 始肌电信号会受到交流电路的 50 Hz 的工频干扰信号, 因此要对原始信号进行 50 Hz 的陷波处理去除电路干扰 信号 。如图 4 所示 。人体的肌电信号频率主要在 20~ 300 Hz 之间, 对原始肌电信号使用二阶的巴特沃斯滤波 器做带通滤波处理[14- 15] 。信号去噪处理结果如图 5 所示, 经过滤波处理的肌电信号 50 Hz 的工频干扰信号明显减 少, 带通滤波处理后的肌电信号依然保有原始肌电信号 的特性且肌电信号的毛刺干扰也有所改善。
3 特征提取
对步态周期进行划分时, 取一个步态周期为 1 s, 肌 电设备的采样频率为 1 000 Hz, 一个步态周期的采样点 数为 1 000 个 。对处理后的肌电信号, 观察其波形变化确 定起始点, 每 1 000 个样本点则为一个周期 。对每一个步 态周期, 分别提取方差 ( VAR ), 均方根 ( RMS ) 两个时 域指标以及中值频率 ( MF ) 和平均功率频率 ( MPF ) 两 个频域指标, 用于后续的肌电信号识别。
( 1 ) 方差
反应表面肌电信号与信号平均值之间的偏离程度, 在运动过程中可以反映出肌肉收缩的剧烈程度, 同时能明显判断出肌电信号的幅值变化情况, 计算公式如下:
式中: N 为采样点数; Xi 为第 i 个表面肌电信号幅值;为样本平均值。
( 2 ) 均方根
反应表面肌电信号的有效值, 表示肌肉在不同步态 周期中的活跃状态, 计算公式如下:
式中: N 为采样点数; Xi 为第 i 个表面肌电信号幅值。
( 3 ) 中值频率
( 4 ) 平均功率谱
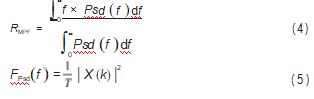
反应表面肌电信号功率谱的平均值, 计算公式如下:
式中:f为频率; FPsd (f )为功率谱密度函数; T 为观察点 的个数; X (k) 为频域序列, 将 X(k) 取模再平方, 取 T 的 均值则得到 Psd (f ), 即功率谱密度估计函数。
根据以上公式, 可以得到步态周期中 5 种相位模式 下的时域特征和频域特征 。对采集所得的肌电信号提取 时域特征, 如图 8 所示, 图中展示了四通道肌肉信号采 集源 5 种相位下的均方根 ( RMS ) 特征值 。图中横轴为 样本的个数, 抽取的样本为同一实验对象的 5 种相位模 式下的任意 10 个样本数据, 图中包含 4 个肌电通道采集 的样本数据: 股直肌 (Recto Femoral, RF ), 股二头肌 (Femoral Biceps, BF ) , 股 内 侧 肌 (Vastus Medialis, VM ), 半腱肌 (Semitendinosus, ST )。 由图 8 可知, 4 种 不同肌肉在不同相位下的均方根值有着明显的区别, 其 中股内侧肌和半腱肌在 5 种相位模式下的均方根特征明 显, 可以直接用于判别运动状态, 但是股直肌和股二头 肌的特征值变化较弱且与半腱肌的特征信号在支撑前期、 摆动前期以及摆动后期有部分重叠, 因此需要结合频域 指标一起进行后续的运动状态识别 。图中股直肌曲线变 化不明显的原因在于其电压值太小, 表 2 所示为其在不 同相位模式下的信号特征明显但在支撑前期与股二头肌 有重叠部分。
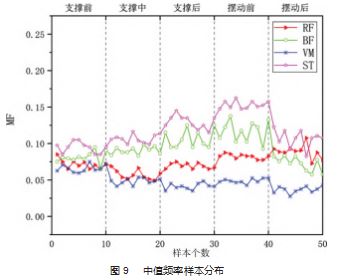
在式 ( 5 ) 的基础上进行频域特征信号的分析, 对采 集所得的肌电信号进行傅里叶变换得到 X(k)。通过上述 公式可到 4 个通道才采集肌电信号的频域指标, 如图 9 和表 3 所示列举了 5 种相位模式下的中值频率 ( MF )。 相比 较时域信号, 中值频率的样本数据之间波动较小, 各肌 肉之间除开支撑前期和摆动后期之外没有重叠的范围, 因此结合时域指标能有效的对运动状态进行分类。
4 分类器设计
4.1 BP 神经网络模型
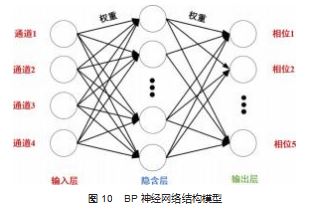
在机器学习的分类算法分为监督学习和非监督学习 的算法, 其中 BP 神经网络算法是一种监督学习算法 。此 算法利用采集所得的肌电样本信号以及对应的相位模式 学习训练出对应的识别分类模型从而进行运动状态的识 别预测 。BP 神经网络算法具有非线性映射能力, 设计的 3 层神经网络模型可以在任意精度下逼近拟合出非线性 函数, 适用于肌电信号预测这种非线性变化的情景 。本 文选取 3 层的 BP 神经网络算法建立相位状态预测模型, 如图 10 所示 。图中输入信号为 4 个肌电采集通道提取的 肌电信号, 输出为 5 种相位状态 。模型的训练函数选取
Levenberg-Marquardt 算法, 神经网络学习速率为 0.01.
在模型训练过程中, 隐含层节点的确定引用经验公 式进行 BP 神经网络模型的搭建。
式中: h 为隐含层节点数目; m 为输入层节点数目; n 为 输出层节点数目; a 为调节常数。
直立行走过程中, 一个周期步态周期为 1 000 ms, 采样频率为 1 000 Hz, 一个样本周中包含的样本点数为1 000 个, 依据不同相位状态在周期中的占用时间得到各 个相位状态所占用的样本点数如下表 。如表 4 所示, 实 验提取 200 组样本数据进行学习训练, 选取总体样本的 70% 作为训练样本, 15% 作为验证样本以及 15% 作为测 试样本 。本文的 BP 神经网络算法使用 MATLAB 编写。
在分类器模型训练过程中, 分别独立用时域特征样 本 (方差和标准差) 和频域特征样本 (中值频率和平均 功率谱) 处理构成特征矩阵 T1 、T2 、T3 、T4. 使用特征 矩阵 T1 、T2 、T3 、T4 分别进行分类器模型的训练。
4.2 多特征融合的 BP 神经网络模型
将时域特征值和频域特征值融合的多特征融合的特 征矩阵进行分类模型训练实验 。在进行多特征值样本融 合处理的过程中, 为了设置更好的时域特征值和频域特 征值的权重, 添加了差分进化算法进行最佳权值的求解。 差分进化 (Different Evolution, DE ) 算法[9]是一种启发式 优化算法, 能高效地优化处理多特征融化问题 。本文提 出一种改机的差分进化算法, 如式 ( 6 ), 将时域特征fs 和频域特征ft 融合得到混合特征fm。
权值 α, β 的适应度函数由 K 次交叉验证分类和步态 动作分类结果错误的数量来决定。
式中: n 为 epoch 的个数; RCVi 为一次交叉验证的平均分 类结果; RZCV 为 5 次交叉验证的平均分类结果; Rerror 为步 态动作分类结果错误的数量。
4.3 DE 算法设计
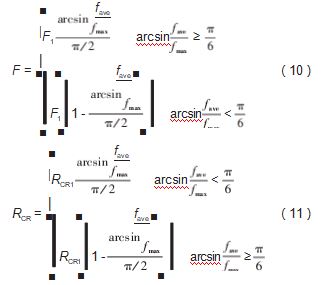
在使用 DE 算法对多特征进行融合时, 添加一个参 数自适应方法提升其收敛速度, 更快得到最优解 。本文 采用快速自适应方法, F 与 RCR 的自适应控制如式 ( 10 ) 和式 ( 11 )。
式中: F 为放缩因子; RCR 为交叉率;fave 为所有个体适应度的平均值;fmax 为适应度值的最大值。
样本种群以 arcsin(favefmax)为依据, 在该值小于 π6时, 说明种群的适应度较分散, 应当增大交叉率和相应 的减小放缩因子 F, 反之亦然 。在 DE 算法中加入自适应 参数能使得子代的多特征融合种群具有更好的分布性 。 根据改进的差分算法, 其步骤如图 11 所示。
设置改进的 DE 算法的进化代数为 100. 种群规模为30. 交叉因子为 0.8. 变异因子的初始值为 0.5. 在 DE 算 法不断迭代过程中变异因子会不断更新 。改进的 DE 算 法在经过 79 次迭代后模型趋于稳定, 此时得到多特征融 合的最优权值 。将得到的混合特征fm 输入到 BP 神经网络 模型中进行分类器的训练。
4.4 结果分析
本实验以采集的大腿肌 (股直肌 、股二头肌 、股内 侧肌 、半腱肌) 表面肌电信号用于平地行走的相位状态 识别 。单一的方差和标准差特征信号其准确率有 78.35% 和 76.36% 。时域特征值在支撑和摆动相位过程的特征明 显, 但存在着股二头肌和半腱肌在支撑前期和摆动前期相位状态的时域特征值有重叠的部分 。单一的中值频率 和平均功率谱特征信号其准确率有 63.43% 和 67.54%。 不同肌肉的频域特征值虽然在不同的相位模式下区分较 明显, 但单独看股内侧肌在支撑中期 、支撑后期和摆动 前期的特征值有重叠部分, 所以其分类器模型的准确率 不高 。因此将时域特征值和频域特征值的结合, 利用时 域特征值支撑和摆动相位特征明显的优点和不同肌肉 的频域特征值区分明显的有点, 组合成特征矩阵 T5 来进 行分类器模型的训练, 其预测准确率明显提高, 准确率 为 86.74%。
5 结束语
本文针对表面肌电信号对平地行走运动进行分析研究, 利用表面肌电信号的特征信号细化分析行走运动的 5 个相位状态 。结合 BP 神经网络分类器模型将表面肌电 信号和行走相位状态对应起来, 并通过表面肌电信号可 以对行走动作进行识别和预测 。实验表明表面肌电信号 的时域和频域特征值对行走状态的识别有明显帮助, 但 其准确程度并不能达到 100%, 分析其原因: ( 1 ) 人体动 作的差异性, 人体行走样本数据并不能做到完全一致导 致误差存在; (2 ) 特征信号的提取存在误差, 对人体运 动周期的划分以及各种相位状态的时间判定都存在误差; ( 3 ) 分类器算法的训练, BP 神经网络算法模型的训练只 能无限逼近于实际数据而不能准确无误的反应出输入输 出之间的关系存在着一定的误差 。下一阶段的研究方向 应是对提取对象的精细划分, 运动状态的细致分类以及 分类器算法模型的优化。
参考文献:
[1] 马舜 . 主被动结合式下肢助力外骨骼机器人研制[D]. 哈尔滨: 哈尔滨工业大学,2017.
[2] 龙亿 . 下肢外骨骼人体运动预测与人机协调控制技术研究 [D]. 哈尔滨:哈尔滨工业大学, 2017.
[3] 俞毕洪 . 基于表面肌电信号的穿戴式人体行为识别系统 [D]. 杭州:浙江大学,2018.
[4] 丁其川, 熊安斌,赵新刚,等 . 基于表面肌电的运动意图识别方 法研究及应用综述[J]. 自动化学报,2016.42(1):13-25.
[5] Xu P, Liu Y, Gu G, et al. Research on the method of EMG pat ‐ tern recognition based on neural networks[C]// 2018 2nd IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC). IEEE, 2018.
[6] 刘磊,杨鹏,刘作军,等 . 采用核主成分分析和相关向量机的人体运动意图识别[J]. 机器人,2017(5):661-669.
[7] 赵晓东,刘作军, 陈玲玲,等 . 下肢假肢穿戴者跑动步态识别方 法[J]. 浙江大学学报,2018.52(10):1980- 1988.
[8] 徐俊武, 沈林勇,章亚男,等 . 利用健肢 sEMG 信号对康复机械 腿进行映射控制[J]. 工业控制计算机,2019.32(5):8- 10.
[9] 李强 . 表面肌电信号的运动单元动作电位检测[D]. 合肥:中国 科学技术大学,2008.
[10] 王善杰 . 下肢可穿戴外骨骼机器人仿人机构设计与运动控 制研究[D]. 合肥:合肥工业大学,2015.
[11] 陈峰 . 可穿戴型助力机器人技术研究[D]. 合肥:中国科学技术 大学,2007.
[12] STAGSTED RAW, RAMARI C, SKJERBAEK AG, et al. Lower extremity muscle power- A critical determinant of physical function in aging and multiple sclerosis[J]. Exp Gerontol. 2021; 150:111347.
[13] 车旭,许峰 . 基于聚类的目标约简高维多目标差分进化算法 [J]. 安徽理工大学学报(自然科学版),2020.40(1):82‐ 86.
[14] 曹玉珍, 陈成,胡勇,等 . 基于独立成份分析的肌电信号消噪方 法研究[J]. 信号处理, 2003. 19(4): 369-372.
[15] 李仲宁, 罗志增 . 基于小波变换的空域相关法在肌电信号中 的应用[J]. 电子学报, 2007. 35(7): 1414- 1418.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/65167.html