SCI论文(www.lunwensci.com)
摘要:智能搬运机器人以控制灵活 、价格低廉 、维护方便 、结构轻巧等优势, 在物流搬运领域得到越来越广泛的应用 。介绍基于 IMXRT1021 单片机的智能搬运机器人的设计, 采取模块化的设计方法, 以全国大学生工程训练综合能力大赛机器人比赛的规则作 为设计要求, 先确定系统设计方案, 再进行硬件电路设计及软件程序设计 。 同时为提高识别的精准度, 提升工件分拣的速率, 在 视觉识别上, 除了颜色识别 、形状识别和二维码识别 3 种目标识别算法配合使用外, 还在视觉技术辅助机械手定位上做了研究, 即通过识别到物体的 X、Y像素坐标, 使得机械手根据该坐标应用逆运动学解算出各个关节应转动的角度, 实现精准抓取。
Design of Intelligent Handling Robot Based on IMXRT1021
Dong Yulin, Cao Yong, Wang Lihong
(School of Electrical Engineering, Liaoning University of Technology, Jinzhou, Liaoning 121001. China)
Abstract: With the advantages of flexible control, low price, convenient maintenance and light structure, intelligent handling robot has been more and more widely used in the field of logistics handling. The design of the intelligent carrying robot is mainly introduced based on IMXRT1021 single chip microcomputer. Taking the modular design method and the rules of the robot competition of the National College Students Engineering Training Comprehensive Ability Competition as the design requirements , the system design scheme is determined first, and then the hardware circuit design and software program design are carried out . At the same time, in order to improve the accuracy of recognition and the speed of workpiece sorting, in addition to color recognition, shape recognition and two-dimensional code recognition, the three target recognition algorithms are used together in visual recognition, and visual technology is also used to assist manipulator positioning . By identifying the X and Y pixel coordinates of the object, the manipulator can use inverse kinematics to calculate the rotation angle of each joint according to the coordinates, so as to achieve accurate grasping.
Key words: intelligent handling robot; modularization; vision technology; steering gear
0 引言
2021 年全国大学生工程训练综合能力大赛活动面向 全球可持续发展人才培养需求, 围绕国家制造强国战略, 以“智能装备”为应用背景, 涉及机械创新设计 、结构 积算 、机器人 、图像识别处理 、物联网和其他技术领域, 综合实力更强 。具有“多学科融合 、学生实践 、评价客 观公正”的特点。
搬运机器人能够高效率替代人工完成繁重的往复搬 运操作, 广泛应用于工业 、仓储业 、制造业 、服务业、 农业等领域[1-2] 。搬运机器人通常可分为两种类型, 一是 固定式工业搬运机器人, 装配机械手 、机械臂根据不同 末端执行器完成自动装配生产线 、流水线 、机床上下料 等搬运工作[3]; 二是移动式搬运机器人, 如 AGV 自主引 导小车 (Automated Guided Vehicle, AGV )、 AMR 自主 移动机器人(Automated Mobile Robot, AMR), 其中 AGV 通过磁引导 、惯性引导 、视觉二维码引导等引导方式完成搬运功能, 存在路线固定和遇到动态障碍物不会避开 等问题, 而 AMR 则通过深度相机 、激光雷达等传感器 感知周围环境信息进行自主导航, 根据不断变化的周围 环境自动避障和规划路径[4-5] 。近年来, 全球机器人行业 发展迅速, 机器视觉 、机器学习 、人工智能等机器人信 息技术不断变新, AGV 正被 AMR 逐渐取代, 自主智能 化搬运将是未来主要发展趋势 。本文设计的智能搬运机 器人是一款基于 IMXRT1021 单片机的自主移动机器人, 可以自主导航、 自动避障和规划路径, 独立完成搬运工作。
1 方案设计
本文的智能机器人是用模块化设计思路, 将整个系 统功能分成自动循迹 、机械手和视觉识别几个部分, 每 一个功能部分作为一个子系统, 再对子系统进行设计, 最后将设计完整的自动循迹系统 、机械手系统和视觉识 别系统整合在一起, 显然这种设计方法结构合理 、条理 清晰 。 由于机械手对物料进行抓取时, 是通过视觉传感器获得目标信息, 如二维码 、形状和颜色等信息[7], 尽 可能用多种算法识别目标, 并进行优化, 这也是设计难点。
1.1 小车控制系统
搬运机器人的工作过程是从出发区开始, 通过采集 路面信息, 按照预置的轨迹到达工作区进行工作 。因此, 本文需要设计一个可靠的小车自动循迹系统, 实现搬运 机器人的自动循迹 。 自动循迹系统流程如图 1 所示。
本设计将自动循迹系统如图 2 所示。( 1 ) 循迹检测 模块, 利用 TCRT5000 作为路径检测传感器, 实现路面 轨迹检测[6]。( 2 ) 单片机控制系统, 以 IMXRT1021 单片 机为控制器, 通过循迹检测模块和测速模块采集的信息 作为输入信号, 经过单片机处理, 将输出信号送给直流 电机驱动芯片, 控制搬运机器人的转速和转向。(3 ) 电 机调速系统, 为了获取较大的输出扭矩, 选取工作电 压 12 V 的 JGB37-550 的 直 流 减 速 电 机 作 为 驱 动 装 置, 电机调试电路的驱动芯片用的是驱动能力 、抗干扰能 力强的 L298N。( 4 ) 调压稳压模块, 由于系统采用的是 3 300 MAH 锂聚电池组, 工作电压是 14.8 V, 需要将此 电压通过调压稳压模块降到 12 V 给直流电机的驱动电路 供电; 降到 5 V 给循迹检测模块和测速模块供电; 降到 3.3 V 给单片机控制器供电。
1.2 机械手系统
1.2. 1 机械部分
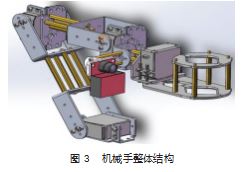
根据比赛规则对参赛机器人的规定, 机械手的机械 部分设计包括平台结构设计 、底座结构设计 、手臂结构 设计 、机械爪结构设计 、存储盒结构设计构成[8] 。其中平 台材料选用亚克力板, 长 300 mm、宽 300 mm、厚 4 mm; 底盘材质为 1 mm 硬铝, 硬度高, 价格低, 适用于机械臂 底盘, 后期在选择舵机时, 要根据金属舵盘本身的性质, 选择耐燃舵机相匹配; 机械臂的手肘关节选用 U 型支架 进行拼接, 两侧打眼用来放置舵机; 机械爪的抓取工作类似于人用整个手掌抓取目标物体, 与夹持式手部相比, 这种手部在抓取的稳定性上有明显优势 。此外设计了视 觉识别模块支架, 安装到了机械爪的旁侧, 故机械手整 体结构如图 3 所示。
1.2.2 驱动部分
机械系统完成运动的一种装置, 常见的传动方式有 液压驱动 、气压驱动和电气驱动 。液压驱动工作比较平 稳, 同等体积下能产生更大的动力, 但工作过程中常有 较多的能量损失 (摩擦损失和泄漏损失等), 密封的要求 也较高, 造价较高; 气压驱动比液压驱动动作迅速, 反 应快, 但速度稳定性较差, 总的输出力不是很大; 电气 驱动是利用电动机产生力和力矩, 经过减速机构去驱动 机器人的关节, 从而获得机器人的位置和速度, 因省去 中间的能量转换过程, 因此比液压和气压驱动的效率高、 成本低 、易于控制 。本文设计的机械手采用电气驱动系 统, 反应快 、 自带了微控制器及编码器数字舵机做驱动 系统, 易于控制, 经济性较好。
1.2.3 控制部分
主控制器收到传感器检测的输入信号, 控制机械手 准确高效地运动 。本文设计的机械手, 需要和视觉识别 模块配合工作, 由于视觉模块自带 STM32 芯片, 解决了 双机通信的问题, 使控制系统的反应速度更加快捷。
2 硬件设计
智能搬运机器人由多个模块组合构成, 其硬件包括 了机器人的整体配置 、IMXRT1021 开发板 、电池 、双路 直流减速电机 、转向舵机 、初步智能且具有单片机接口 的 OpenMV3 视 觉 模 块 、 电 机 驱 动 、 循 迹 传 感 器 TCRT5000 、光电码盘 、TCRT500 红外传感器。
2.1 主控芯片
主控芯片是机器人行走的核心控件, 接收传感器采 集的输入信号, 并将控制信号输出到驱动芯片, 从而控 制机器人沿指定路线行走并停车定位 。本设计选用 IMX RT1021 最小控制系统来控制机器人行走 。该控制系统自 带晶振电路和复位电路, 因此减少了设计电路的工作量。
2.2 行走电机
机器人常用直流减速电机驱动, 通过齿轮箱的减速,这种电机可以输出较大的扭矩[3] 。经过比较选择, 选取 产品型号为 JGB37-550 的直流减速电机。
2.3 电源
选择可靠的电源是设计机器人过程中不可缺少的一 环 。通过以往的设计方案经验和综合考虑, 决定使用航 模电池既锂聚电池 。考虑到电源要为电机 、舵机 、硬件 电路同时供电,选择两块容量为 3 300 mAh 的锂聚电池组, 其中一 块作为备用电源 。 由 4 块输出电压为 3.7 V 的电池串接而 成, 能保持3.3 A ( 3 300 mA) 放电 1 h, 性能足够强大。
2.4 转向舵机
伺服是一种可以精确地控制身体运动的电动机 。本 次 机 械 臂 设 计 中, 共 使 用 了 5 个 伺 服 电 机 ( 型 号 MG995), 每个伺服电机可提供 180°的旋转运动范围并允 许控制位置。
2.5 视觉模块和机械手控制芯片
本设计难点之一是如何识别抓取物料工件, 需要抓 取的物料工件有 3 种颜色, 利用物料工件的颜色来识别 目标是较好的选择 。识别传感器采用具有单片机接口的 OpenMV3 视觉模块 。OpenMV3 模块上有一个摄像头用 于拍摄物体图像, 拍摄的图像由模块集成的 STM32 芯 片处理。
2.6 电机驱动的电路
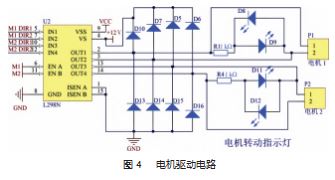
本次设计选择 L298N 作为控制电机的驱动板 (图4 ), L298N 芯片可同时控制两个直流减速电机做不同动 作, 在 6 ~ 46 V 的电压范围内, 提供 2 A 的电流, 并且具 有过热自断和反馈检测功能 。L298N 可对电机进行直接 控制, 通过主控芯片的 I/O 输入对其控制电平进行设定, 就可为电机进行正转反转驱动, 操作简单 、稳定性好, 可以满足直流电机的大电流驱动条件。
2.7 调压稳压电路
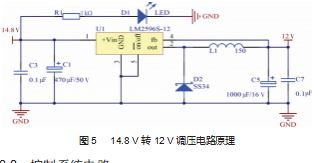
由于本设计搬运机器人选择两块容量为 3 300 mAh 的锂聚电池组, 工作电压为 14.8 V, 而主控制器芯片 IMXRT1021 工作电压为 3.3 V; 直流减速电动机的驱动 系统的驱动芯片 L298N 的工作电压是 12 V; 循迹模块和 测速模块的传感器工作电压一般都在 5 V 左右 。 因此,只用锂聚电池组提供 14.8 V 电源是远远不能满足系统的 要求, 需要稳压电路进行降压处理 。本文选用 LM2596S 调压模块来实现对电压调控的功能, LM2596 系列开关稳 压器是一款降压型电源管理单片集成电路, 可输出 3 A 的驱动电流, 具有良好的线性度和负载调节特性 。 固定 输出版本有 3.3 V 、5 V 、12 V, 也有可调输出版本。
本次设计中, 选用了 LM2596S 的 3 个固定调压模块, 即 3.3 V 、5 V 和 12 V 。首先为满足直流减速电动机的驱 动芯片的工作电压, 将 14.8 V 电压降成 12 V 电压; 为满 足循迹模块和测速模块传感器的工作电压, 再将 12 V 电 压继续降到 5 V; 为满足主控制器芯片 IMXRT1021 的工 作电压, 再将 12 V 电压继续降压成 3.3 V, 这样逐级降 压, 可以降低降压过程中的损耗降 。 调压电路原理图如 图 5 所示 (以 14.8 V 转 12 V 为例)。
2.8 控制系统电路
本文共选用了 12 路 TCRT500 红外传感器来检测路面 信息, 即在车体每条边上通过 3 个 TCRT5000 传感器来寻 找黑色路径, 当机器人竖直行走时, 依靠左右两侧的万 向轮作为机器人的动力轮, 而前后的万向轮用来调整车 身的方向, 即当车头左侧传感器检测到黑线, 单片机通 过电机驱动控制车头的万向轮正转, 反之反转; 当车尾 左侧传感器检测到黑线, 单片机控制车尾万向轮正转, 反之反转 。这样在机器人竖直行走时, 可以同时保证车 头车尾不发生偏移 。 同理当机器人水平方向行走时, 则 通过左右两边的传感器检测黑线, 和左右两侧的万向轮 来调整机器人的行走方向。
3 软件设计
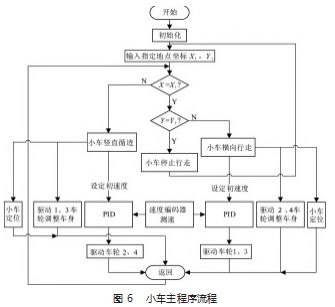
主程序流程如图 6 所示, 首先根据目的地横坐标位 置判断此时小车自身的横纵坐标是否到达指定位置; 若 未到达, 小车先朝着 X 轴方向行驶, 当小车横坐标达到 目标位置时, 再判断纵坐标 Y 是否达到位置; 同理, 若 达到则小车停止, 若未达到则继续朝 Y 方向行驶, 当小 车确定完行驶方向后, 小车会以一定的速度朝着目标移 动, 因此需要给定小车初速度, 但由于路面摩擦因数的 变化, 以及负载重心随时偏移的可能性, 小车的速度会 因这些因素而改变, 导致车身偏离预设路径, 故通过增 加速度传感器, 获得小车的速度反馈, 形成 PID 速度闭环并通过 PWM 调速来使小车速度保持稳定 。速度反馈通 采用串口通讯。
4 Simulink 仿真
根据直流电动机调速系统在励磁电流处于额定状态 时的动态结构, 采用 MATLAB Simulink 进行仿真, Simu ‐ link 是由多个模块构成的环境, 支持系统设计 、仿真 、 自动代码生成以及嵌入式系统的连续测试和验证 。 电机 增量式 PID 控制结构如图 7 所示。
为了能够较为精确地得到仿真参数, 采用了稳定边 界法来整定 PID 参数, 如表 1 所示。
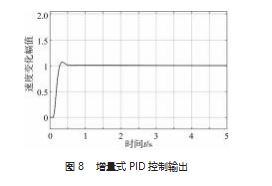
经过多次反复的参数整定, 最终得出的 PID 的各个 参数为: Kp=8.5 、Ki=0.4 、Kd=3. 此时输出的波形最稳 定 。从图 8 中可以看出, 该系统的超调量为 10%, 稳定时间为 0.6 s 。对于增量式 PID 控制来说, 这样的性能指 标已经能够达到稳定控制小车的目的。
5 结束语
本文以智能搬运机器人为研究对象, 用 IMXRT1021 为核心控制器, 通过发光二极管和光敏电阻组成的光电 传感器检测路线, 跟随颜色路线; 利用颜色识别 、形状 识别 、二维码识别 3 种目标识别算法, 识别要抓取的物 品, 让机器人更快, 更精准抓取目标 。本机器人可满足 物流运输过程物资搬运的需求, 为智能制造领域设计物 流自动化方案具有一定参考价值。
参考文献:
[1] 苏品刚, 尚丽,胡志峰 . 基于单片机的智能分拣机器人的设计 与实现[J]. 苏州市职业大学学报,2016.27(3):16-20.
[2] 邓华军,段月红, 卢培文 . 基于 RobotStudio 的机器人搬运码垛 虚拟仿真平台[J]. 自动化与信息工程,2023.44(1):27-32.
[3] 刘振宇,李中生,赵雪,等 . 基于机器视觉的工业机器人分拣技 术研究[J]. 制造业自动化,2013.32(9):25-30.
[4] 虞佳佳,黄文广, 张耀 . 基于机器视觉的冷油管螺纹中径自动 检测系统[J]. 机电工程, 2022. 39(6):833-838.
[5] 范海伦,祖洪飞, 向忠,等 . 传感器弹性元件本构模型参数拟合 研究[J]. 轻工机械,2022.40(1):7- 12
[6] 张猛,施保华 . 基于机器视觉系统的 PC 主板自动组装[J]. 中国 仪器仪表,2016(9):32-35.
[7] 罗湘喜,袁锋伟, 刘志伟 . 基于视觉导向的机械手设计与研究 [J]. 机械工程师,2016(12):54-56.
[8] 李珺茹 , 齐立群 , 韩文波 . 六自由度机械臂运动学分析与轨 迹 优 化 [J]. 长 春 理 工 大 学 学 报 ( 自 然 科 学 版), 2019. 42(1): 68-73.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/64989.html