SCI论文(www.lunwensci.com)
摘要:针对现有的电机状态监测方法因状态曲线反复穿越报警线, 导致状态预警分析准确率低的问题, 提出一种长短期记忆网络 (LSTM) 与工艺参数相结合的状态监测方法。该方法首先采用主成分分析 (PCA) 对电机正常运行状态的电流、电压信号特征矩 阵进行特征降维, 再借助 LSTM 完成状态预测模型构建, 基于历史运行数据实现对当前阶段运行待测数据状态值的预测, 最终通过 对比实测值与预测值的差异度完成电机运行状态的判断。搭建电机故障实验台对提出方法进行验证, 实测数据分析结果表明, 所 提出的方法可有效实现针对电机的状态监测, 与振动参数分析的对比结果显示, 该方法具备较好的模型稳定性及准确性, 有效解 决了状态监测模型误报、漏报的问题, 实现了对电机运行状态的准确监测。
Condition Monitoring Method of Motor Based on LSTM and Electrical Parameters
Yang Lei, Lei Cheng, Li Liang, Wang Jingqi
(CNNC Jiangsu Nuclear Power Corporation, Lianyungang, Jiangsu 222000. China)
Abstract: Aiming at the problem of low accuracy of condition warning analysis due to the state curve crossing alarm line repeatedly, a condition monitoring method combining long short-term memory network (LSTM) and process parameters is proposed. In the method, principal component analysis (PCA) is used to reduce the characteristic dimension of the current and voltage signal characteristic matrix of the normal running state of the motor, and then the state prediction model is constructed with the help of LSTM, and the state value of the data to be measured in the current running stage is predicted based on the historical running data . Finally, the running state of the motor is judged by comparing the difference between the measured value and the predicted value . A motor fault test platform is built to verify the proposed method. The analysis results of the measured data show that the proposed method can effectively realize the condition monitoring of the motor . The comparison results with the analysis of vibration parameters show that the proposed method has better model stability and accuracy, effectively solves the problem of false positives and missing positives of the condition monitoring model, and realizes the accurate monitoring of the running state of the motor.
Key words: electric motor; condition monitoring; current; voltage; LSTM
0 引言
随着能源转型步伐的逐步推进, 核电在我国能源结 构中将占据越来越重要的地位[1]。循环水泵作为核电系 统能量输送的重要设备, 被称为装置的心脏, 泵电机作 为循环水泵的直接动力输入设备, 是核电站稳定运行的 重要保障[2]。对泵电机的运行状态进行状态监测, 是保 障核电安全生产的必然要求。
目前针对电机的监测主要采用单特征固定阈值的方 法, 监测结果易受设备工况波动、环境及意外接触撞击 等因素的干扰, 导致状态监测准确率低且稳定性较差。 近年来许多学者针对上述问题展开了研究。孟玲霞等[3] 采用经验模态分解、盲源分离、流行学习等技术提取时 域及频域中的早期故障敏感特征, 实现了在设备变工况 条件下的预警监测; 郑小霞等[4] 提出一种基于变分模态分解的微弱信号提取方法, 并借助深度置信网络实现故 障状态的识别。王梓齐等[5] 通过模糊软聚类和集成非线 性状态估计的方法降低历史数据因边界重叠对风电机组 齿轮箱状态监测结果的影响。
上述方法以振动信号为研究对象, 未从信号产生层 面降低因设备干扰振动对分析结果的影响, 且均依据单 时间点数据进行状态监测, 未揭示系统潜在状态所发生 的变化特征, 因而难以对故障的发展做出预测[6]。机械 设备信号是一种时序数据, 相邻时刻数据间存在一定相 关 性 。 隐 马 尔 科 夫 模 型 (Hidden Markov Model, HMM) 是处理时序数据的一种方法, 例如, 李志农等[7] 提出无 限 HMM 对旋转机械故障进行诊断, 通过最大似然估计 确定故障类型, 在实验中取得了非常满意的效果; 胡瑾 秋等[8]从工艺偏差角度入手, 基于尺度效应建立基本事件求解模型, 通过模糊 petri 网模型进行事故概率估计从 而实现状态监测。许力等[9]采用基于变尺度 PCA 的早期 预警方法, 对多时间尺度的特征序列进行特征降维并结 合 K-means算法确定状态异常点位置。 Hochreiter等[10]提 出的 LSTM很好地解决了该问题, LSTM通过对传统循环 神经网络 (Recurrent Neural Network, RNN) 添加遗忘门 使其具备长期记忆的能力, 因此能够基于更长时间的历 史数据进行预测, 目前 LSTM 已经被应用于文本内容理 解[11]、股票价格预测[12]、剩余寿命预测[13]等多个领域, 但在机械设备状态监测上的研究却很少。
综合上述研究现状, 现阶段的监测主要以单一监测 指标为主, 信号受环境干扰较大, 存在监测结果滞后且 准确率低的问题。为解决上述问题, 本文提出一种基于 LSTM 与多种工艺参数 PCA 降维的循环水泵电机状态监 测方法, 构建具备预测下一时刻参数值的状态模型, 计 算实测值与 LSTM 预测值的差异, 并与自学习状态阈值 进行对比确定电机状态, 最后通过模拟实验数据对方法 准确性进行了验证。
1 理论基础
1.1 LSTM理论
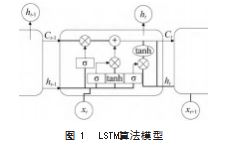
LSTM 可以有效解决传统循环神经网络缺乏长期记 忆的问题, 其模型结构如图 1所示[14]。
其中, %t 和 ht 分别为 t 时刻 LSTM单元的输入向量和 隐藏状态; sigmoid激活函数和双曲正切激活函数分别由 σ ( ) 和 tanh表示; ⊕ 为逐点相加; ⊗ 为逐点相乘; 算法 模型由 3 种门结构即遗忘门、输入门和输出门组成, 可 通过门结构向各单元状态中增减信息[15]。
( 1) 遗忘门: 遗忘门决定了上一时刻的单元状态有 哪些信息需要被遗忘, 即有多少信息分量保留到当前时 刻[16]。将上一时刻的隐藏状态和当前时刻的输入信息传 递到 sigmoid 函数, 输出值在 0~1 之间, 越接近于 1则表示信息应保留, 反之则应被遗忘, 其计算方法如式 (1)。
式中: ht - 1 为上一时刻的隐藏状态信息; bf 和 Wf 分别为 遗忘门的偏置和权重向量。
( 2) 输入门: 当前时刻单元状态的更新由输入门完 成。首先将当前时刻的输入信息和上一时刻的隐藏状态分别输入至 tanh 函数和 sigmoid 函数, 由sigmoid 函数确 定需要被保留的信息, tanh 函数生成候选向量, 其计算 过程分别如式 (2) ~ ( 3) 所示; 再将 it 、gt 逐点相乘作 为需要新添加到单元状态的信息, 最后将其与遗忘门的 输出逐点相加, 完成单元状态的更新, 其过程如式 ( 4) 所示。
式中: Wi 、bi 分别为输入门中激活函数为 sigmoid 的隐含 层的权重向量和偏置; Wg 、bg 分别为输入门中激活函数 为 tanh 隐含层的权重向量和偏置。
( 3) 输出门: 当前时刻的隐藏状态值由输出门确定。 首先将上一时刻隐藏状态与当前时刻输入信息传递给 sigmoid 函数, 然后将当前时刻细胞状态传递给 tanh 函 数, 最后将 sigmoid 和 tanh 的输出逐点相乘得到隐藏状态值, 其过程如式 (5) 所示。
式中: Wo 与 bo 分别代表输出门中隐含层的权重向量和 偏置。
1.2 PCA理论
PCA是通过一组标准正交基将原始变量线性转换为 新变量的算法, 定义包含原始特征主要原始信息的一个 或多个成分为主成分[17]。定义原始特征矩阵 A 如式 (6) 所示。
式中: m 为单组特征数量; n 为特征组数。
通过标准正交基 e 构造变换矩阵为:
因此 Cx 的特征值可表示为 {λi'}, 特征向量为 {ei'}, 对 λ i'进行降序排列, 并依据对应顺序对{ei'}更新排序确定标 准正交基 {ei }, ei (i = 1. 2. ⋯,m)对应的信息量依次降低。
2 基于 LSTM 的状态监测方法
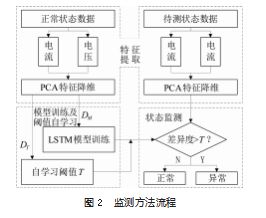
提出方法选用电流、电压电气参数对循环水泵电机 运行状态进行监测, 基于正常状态数据建立预测模型与 基准阈值, 依据预测模型计算结果与实测数据的差异度 判断电机运行状态, 其监测流程如图 2所示。
2.1 特征提取
首先采集各关键测点的电流、电压信号, 提取各组 信号峰值形成原始特征矩阵, 然后采用 PCA算法对其进 行特征降维, 使得单组特征数据满足 LSTM 模型的输入 要求, 具体步骤如下。
( 1) 采集电机稳定运行阶段的电流与电压数据, 依 据等时间间隔对数据进行分组划分, 提取各组信号波形 的 峰 值 组 成 原 始 特 征 矩 阵 E = [ I1 , ⋯,Ii , U1 , ⋯, Ui ], 其 中, i=1. 2. …, k, k 为测点数。
( 2) 采用 PCA 算法对原始特征矩阵 E 进行降维, 得到降维后特征矩阵 F = [f1 , ⋯,fi ] i = 1. 2. ⋯, k。
( 3) 选取数据集 D 作为模型输入特征, 其中 DM 为监 测模型训练数据, DT 为自学习阈值用数据, 数据集 D 如式 (11) 所示。
D = [DM ,DT ] = [ F1 , ⋯, FN , FN + 1. ⋯, FM ] ( 11)
2.2 模型训练及阈值自学习
基于降维后数据集 D 进行状态监测模型训练及阈值 自学习, 具体过程如下。
2.2.1 状态监测模型训练
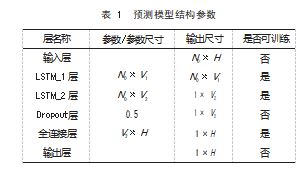
本文提出方法中的状态监测模型由输入层、 LSTM 层、 Dropout层、全连接层及输出层构成, 各部分关键结 构参数如表 1 所示。表中, H 为采用 PCA 算法降维后 特征矩阵的主成分数; N0 为 LSTM 预测时需要的历史 数据组数; V1 和 V2 分别为 LSTM_1 及 LSTM_2 中的神经 元数。
提出方法设定状态监测模型的目标函数如式 (12) 所示, 可通过 Adam优化算法最小化 J。
式中: h (Ft )为预测模型对输入数据 Ft 的预测值; Frt 为实测值。
2.2.2 阈值自学习
当设备状态发生异常变化时将伴随着多种特征值的 改变, 为准确表达多维度特征的差异, 实现这种差异的 最大化显示, 本文选用马氏距离衡量实测值与预测值之 间的差异度。采用 3σ准则对监测阈值进行设定, DT 中实测值与差异值之间的绝对值差异如式 (13) 所示。
式中: Δft 是维度为 H 的真实值与预测值之间的差异向 量。 ΔF 中所有元素与 ΔF 均值间的马氏距离组成如式 ( 14) 所示的集合。
对 Fe 内元素按升序排序, 取 Fe 的上四分位数为 Q2. 下四分位数为 Q 1. 则状态监测阈值如式 (15) 所示。
2.3 状态监测
采集待测电机运行状态数据, 提取与状态监测模型 训练数据相同的状态特征, 依据实测值与预测值间的差 异度是否超过监测阈值, 判断电机处于“正常”或“异 常”状态, 实现针对循环水泵电机的状态监测。
3 实验验证
通过电机故障模拟实验台验证提出方法对不同健康 状态电机的监测效果, 并与基于振动信号的监测结果进 行对比, 具体分析如下。
3.1 实验台及实验设计
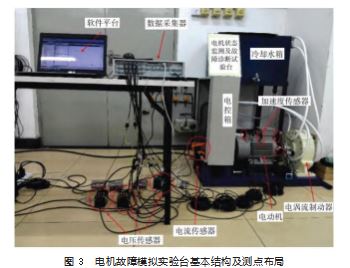
搭建实验台电机型号为 1LG0106. 工频为 50 Hz; 盘 式电涡流制动器型号为 WZ-25P; 选用电流传感器、电 压传感器及加速度传感器对信号进行采集, 实验台结构 及各传感器布局如图 3所示。
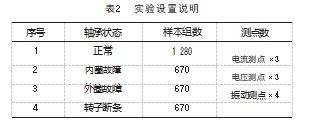
分别进行正常、内圈故障、外圈故障及转子断条故 障 4组电机运行实验, 获取不同健康状态下的电机数据, 实验数据如表 2所示。
3.2 实验参数设置
( 1) 特征提取
选取前 640组正常状态样本数据用于监测模型构建。 首先提取电流、电压各三通道信号的峰值组成六维特征 向量, 再通过 PCA算法对特征数据进行各主元贡献率计 算, 选取前 3个主元组成的降维后特征进行监测模型构 建, 即 H=3.
设定 N0 = 6. 将正常状态数据构造成包含 634 个样 本的训练样本集, 取前 404个样本用于训练状态监测模 型, 后 230个样本用于自学习报警阈值。
( 2) 监测模型参数设置
设定状态监测模型中 LSTM_1、LSTM_2 的神经元个 数分别为 V1 = 128、V2 = 64. 为在取得较小损失函数值 的同时减少运算量, 提出方法的训练次数设定为 300. 3.3 数据处理及结果分析每组实验均采用 640组正常状态数据与 670组异常状 态数据组成的样本集作为测试数据, 即 641 组数据为第 一组异常数据, 分析结果如下。
( 1) 实验结果分析
采用提出方法对内圈故障实验数据进行监测分析, 其结果如图 4所示, 其中横轴为实验数据组数, 纵轴为 马氏距离。
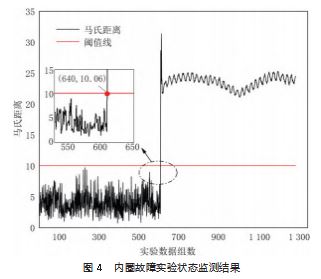
采用提出方法对外圈故障实验数据进行分析, 其结 果如图 5所示。
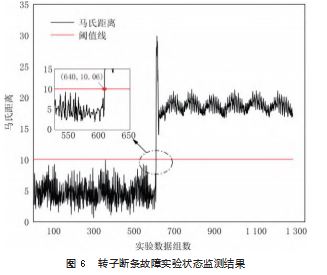
对转子断条故障实验数据使用提出方法进行处理, 监测阈值与计算结果如图 6所示。
从以上显示结果可看出, 使用提出方法对各组故障 实验数据进行分析, 均显示从第 640 组数据开始均超过 监测阈值, 判断为异常状态, 不存在漏报的问题, 且 640 组前的数据均低于监测阈值, 不存在因反复穿越阈 值线导致的误报问题, 状态监测结果准确。
( 2) 对比分析
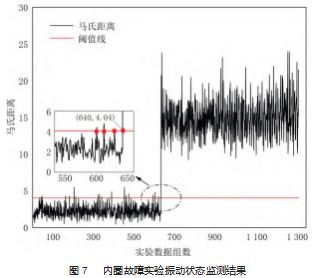
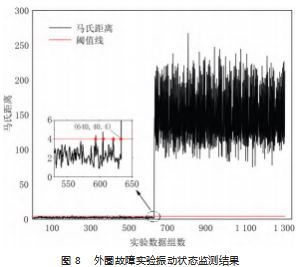
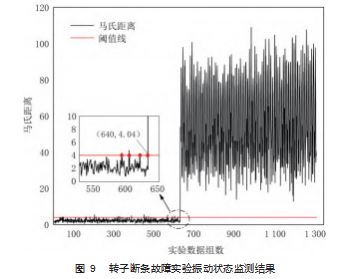
基于振动信号对上述实验进行分析, 其结果分别如 图 7 ~ 9 所示。
通过振动信号监测分析结果可发现, 正常状态数据 存在反复穿越监测阈值的现象,其主要原因为电机的振动 特征变化相比电气参数更易受到其他部件的干扰,信号稳 定性较差。由于同一状态下电流、电压参数变化较小,故 当电机状态发生改变时,电气参数监测曲线在不同状态数 据相接处存在较为突出的波峰,随着同一状态数据的连续 输入监测曲线迅速趋于稳定, 而振动信号自身易受干扰, 监测曲线波动较大。综上分析可知,提出方法相比对比方 法存在无误报、无漏报及高稳定性的优势, 适用性更强。
4 结束语
本文研究并提出了一种基于 LSTM 与电气参数的循 环水泵电机状态监测方法, 通过电机故障模拟实验对方 法进行分析验证, 得到如下结论。
( 1) 提出方法有效解决了因状态特征值波动较大, 造成特征曲线反复穿越监测阈值并导致的误报问题, 提 高了状态监测的准确率。
( 2) 采用电流、电压作为监测参数, 相比振动监测 具有信号干扰小、状态特征值波动小且预警模型稳定性 强等优势。
( 3) 提出方法选用马氏距离评估不同状态特征数据 集间的差异度, 可准确及时地发现异常监测点, 且仅通 过正常状态数据即可完成预警监测模型的构建, 具有较 好的普适性与较高的实用性。
参考文献:
[1] 舒相挺,杨璋,徐逸哲,等 . 某核电厂主给水泵电动机轴向振动 故障诊断[J]. 振动、测试与诊断, 2021.41(3):527-623.
[2] 赵耀,霍雨佳,王军,等 . 核电厂安全级仪表在线监测系统技术 研究[J]. 核动力工程, 2021.42(2):183- 187.
[3] 孟玲霞,徐小力, 蒋章雷,等 . 风电机组齿轮箱早期故障预警方 法研究[J]. 仪器仪表学报, 2016.37(12):2758-2765.
[4] 郑小霞 , 陈广宁 , 任浩翰 , 等 . 基于改进 VMD 和深度置信网 络 的 风 机 易 损 部 件 故 障 预 警 [J]. 振 动 与 冲 击 ,2019.38(8): 153- 179.
[5] 王梓齐,刘长良,刘帅 . 基于集成 NSET 和模糊软聚类的风电机 组齿轮箱状态监测[J]. 仪器仪表学报, 2019.40(7):141- 149.
[6] 赵雨薇,马波, 沈炳生,等 . 状态子空间在往复压缩机自动预警 方法的研究与应用[J]. 机械科学与技术, 2016.37(12): 2758- 2765.
[7] 李志农,柳宝,侯娟,等 . 基于无限隐 Markov 模型的旋转机械故 障诊断方法研究[J]. 仪器仪表学报, 2016.37(10):2185-2192.
[8] 胡瑾秋,郭家洁 . 基于尺度效应的过程安全事故概率估计[J]. 化工学报,2017.68(12):4848-4856.
[9] 许力,竺鹏东,顾宏杰,等 .基于变尺度 PCA 的电力设备载流故 障早期预警[J]. 电力自动化设备, 2012.32(5):147-151.
[10] Hochreiter S, Schmidhuber J. Long Short-Term Memory[J].Neural Computation,1997(9): 1735-1780.
[11] Geng Z, Chen G, Han Y, et al. Semantic relation extraction us⁃ ing sequential and tree-structured LSTM with attention[J]. Infor⁃ mation Sciences,2020. 509: 183-192.
[12] 史建楠,邹俊忠,张见,等 . 基于 DMD-LSTM 模型的股票价格 时间序列预测研究[J].计算机应用研究 .2020.37(3): 662-666.
[13] 葛阳,郭兰中,牛曙光,等 .基于 t-SNE 和 LSTM 的旋转机械剩余寿命预测[J].振动与冲击, 2020. 39(7): 223-231.
[14] 王鑫,吴际,刘超,等 .基于 LSTM循环神经网络的故障时间序 列预测[J]. 北京航空航天大学学报, 2018.44(4):772-784.
[15] 史亚菲,李峭,熊华钢 .基于 LSTM 的TTE 网络速率约束流量 预测[J]. 北京航空航天大学学报, 2020. 46(4): 822-829.
[16] 郑必君,金宏伟,孟瑜炜,等 . 改进型 LSTM 实现燃煤电厂脱硝 预警及优化[J]. 节能环保, 2021.2(8):53-60.
[17] 张银波,李思宁,姜鹏,等 . PCA 特征提取和弹性 BP神经网络 的水下气泡识别[J]. 红外与激光工程, 2021.50(6):1-7.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/64372.html