SCI论文(www.lunwensci.com)
摘要 :在 AEMSim 仿真环境下, 运用该软件内置的液压库 、机械库以及相关模型库, 构建液压缸的位置控制系统模型, 通过调节 仿真模型中各个部件的参数对液压缸活塞杆的位移进行仿真分析, 绘制液压缸活塞杆的实际输出位移与期望位移和两者之差的仿 真结果 。结果表明: 当增益 4 为 250 时, 输出的位移与预期设置的位移之间的稳态误差是符合要求的, 但动态跟踪误差超过了预期 设定的范围, 即超过了 0.015 m; 当增益 4 调整为500 时, 虽然动态跟踪误差满足要求, 但稳态误差超标, 超过了 0.000 5 m 。所以 增益值不是越大越好, 而应该根据要得到的精度和具体要求进行实时调整, 进而通过获得最佳的增益值来获得最佳的输出 。研究 结果为液压系统设计 、后续评估及测试提供了参考。
AMESim Simulation Technology and its Application in Hydraulic Cylinders Performance Analysis
Luan Jianyang1. Zhang Ming2. Gao Fei2. Li Huan2. Du Shengjie2. Xu Lili2
( 1. CRRC TANG SHAN Co., Ltd.,Tangshan, Hebei 064000. China; 2. Guangzhou GRG Metrology &Test Co., Ltd., Guangzhou 510656. China) Abstract: Under the AEMSim simulation environment, by using the built-in hydraulic library, mechanical library and related model library of the software, the position control system model of the hydraulic cylinder is constructed . By adjusting the parameters of each component in the simulation model, the displacement of the piston rod of the hydraulic cylinder is simulated and analyzed .The simulation results of the actual output displacement and the desired displacement of the piston rod of the hydraulic cylinder and the difference between them are drawn .The results show that when the gain of 4 is 250. the steady-state error between the output displacement and the expected displacement meets the requirements, but the dynamic tracking error exceeds the expected range, that is, more than 0.015 m; when the gain 4 is adjusted to 500. although the dynamic tracking error meets the requirements, the steady-state error exceeds the standard, exceeding 0.000 5 m. Therefore, the gain value is not adjusted as large as possible, but should be adjusted in real time according to the accuracy and specific requirements, and then by obtaining the best gain value to obtain the best output.. The results provide valuable basis for hydraulic system design and a reference for subsequent evaluation and testin.
Key words: AMESim hydraulic simulation; hydraulic cylinder; piston rod displacement
0 引言
现代液压系统设计不仅要满足静态性能要求, 更 要满足动态特性要求 。而动态特性的输出受增益大小 的制约, 一般来说, 增益越大, 输出越稳定, 但任何 事都过犹不及 。 因此, 需要通过仿真来确定增益与输 出 之 间 的 关 系, 为 液 压 系 统 的 设 计 提 供 参 考 。 初 琦 等[ 1] 利用 AMESim 软件进行故障仿真分析, 采取可靠性 仿真和优化设计相结合的方法使系统的稳定性提高到 89%, 可 靠 性 提 高 到 了 0.81 。谭 壮 壮 等[2] 通 过 建 立 液 压控制系统模型, 对多种工况进行了仿真分析, 得到 液压子系统充压时间 、操作时间和关断时间等仿真结 果, 并对系统的性能和稳定性进行了分析, 优化了系 统性能 。
随着计算机技术的发展和普及, 利用计算机进行数 字仿真已成为液压系统动态性能研究的重要手段 。而计 算机仿真必须具有 2 个主要条件: 建立准确描述液压系 统动态性能的数学模型; 利用仿真软件对建立的数学模 型进行数字仿真 。AMESim 仿真软件在液压领域应用极 为广泛, 沈仙法等[3] 为测试汽车悬架弹性元件的疲劳强 度, 利用 AMESim 软件对液压系统进行了压力和流量仿 真, 其研究成果为汽车悬架弹性元件液压动态疲劳试验 台的改进提供了技术参考; 王吉平等[4] 采用 AMESim 对 EBZ75 型掘进机截割部液压系统进行了仿真, 验证了其 功能。
利用 AMESim 对液压元件和系统进行仿真研究, 需 要考虑许多因素, 如参数设置的合理性, 参数过大或过小, 都会对仿真结果造成影响 。因此, 需要根据实际应 用进行调整和分析, 使得液压仿真技术的应用更加成熟, 使它成为液压系统设计人员的有力工具[5]。
1 AMESim 软件简介
AMESim 是法国 IMAG1NE 公司于 1995 年推出的基于 键合图的液压/机械系统建模 、仿真及动力学分析软件。 AMESim 全称为 Advanced Environment for Performing Sim ⁃ ulations of Engineering Systems (高级工程系统仿真建模 环境), 该软件包含 IMAGINE 的专门技术, 并为工程设 计提供交互能力 。AMESim 为流体动力 (流体及气体)、 机械 、热流体和控制系统提供一个完善 、优越的仿真环 境及最灵活的解决方案, 例如在燃油喷射 、制动系统、 动力传动 、机电系统和冷却系统中的应用 。使用者能够 借助其友好的 、面向实际应用的方案来研究元件或回路 的动力学特性[6] 。面向工程应用的定位使得 AMESim 在航 空航天工业 、汽车制造和传统液压行业等领域得到了广 泛的应用 。AMESim 由一系列软件构成, 包括 AMESim、 AMESet 、AMECusto 和 AMERun, 这 4 个部分有其各自的 功能和特性。
AMESin 为用户提供了一个图形化的时域仿真建模环境, 使用已有模型和建立新的子模型元件, 构建优化设 计所需的实际原型, 方便用户建立复杂系统及用户所需 的特定应用实例, 通过修改模型和仿真参数, 进行仿真 计算 、绘制曲线并分析仿真结果。
2 对液压缸位置控制的仿真研究
2 . 1 研究目的
液压缸是液压系统中的执行元件, 它实现了液压能 到机械能的转换, 因结构简单 、工作可靠, 在机械系统 中得到了广泛应用 。但是在很多情况下, 液压缸在工作 时达不到它的最大性能 。通过仿真对液压缸的性能进行 研究, 可以使其在工作时具有更高的可靠性和更好地发 挥性能[7]。
以一个液压缸的位置控制系统为例说明 AMESim 的 应用 。采用位置反馈控制液压缸推动一个负载, 位置传 感器将采集到的位置信号实时传输到位置控制系统中 。 位置循环用位置循环子模型设定 。指定的位置同传感器 反馈的位置比较产生误差 。该误差乘以一个增益后的信 号用于驱动伺服阀 。另一个工作循环通过位移传感器对 液压缸施加一个外负载。
2 .2 模型的建立与运行
( 1 ) 搭建模型
在 AMESim 草图模式下, 运用液压库提供的液压泵 和溢流阀组 、机械库和信号控制库组建液压缸位置控制 系统的仿真模型, 如图 1 所示。
( 2 ) 为系统设置最简单的子模型
进入子模型模式, 为测试系统中的每个图形模块选 取子模型 。AMESim 提供了首选子模型功能。
( 3 ) 设置子模型参数
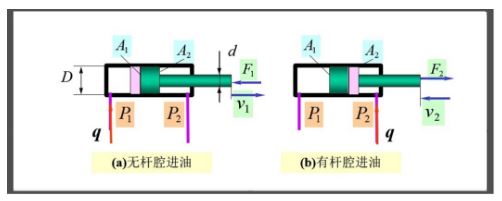
在 AMESim 系统参数模式下为每个子模型设置参数。 根据液压缸的组成, 分别设置液压缸内各个子部件的参 数, 为仿真测试提供输入的参考数据 。其中, 液压缸组 成模块中的活塞半径初步设定为 15 mm, 活塞杆半径初 步定为 10 mm, 冲程长度设置为 1 m, 模拟的负载质量设 置为 2 500 N 。一般来说, 液压缸内执行器的固有频率都 是 50 Hz, 阻尼率为 2. 设置电流为 200 mA 。按照常规设 置好动力装置即启动泵的性能参数、信号源的参数, 这样 活塞杆一般会得到一个 1 000 N 阻力的恒力 。再设定好期 望位移、执行位移, 为了保证测试精度, 增益一般设置为 10 dB 。为获得详细的仿真测试结果, 将信号源分段设置: 0~ 1 s 设置为 0. 1~4 s 的变化范围 0~0.8. 4~5 s 保持 0.8 不 变; 5~8 s 变回到 0.2. 此后直至 30 s, 一直保持 0.2 不变 。
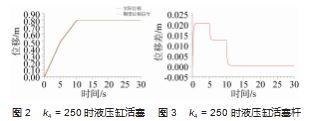
根据前面参数的设置, 系统预期达到的性能指标为: 从开始到运行 30 s 的时间范围内, 动态跟踪误差不超过 0.015 m, 稳态误差不超过 0.000 5 m 。在这里, 通过调节 增益 4 的大小, 观察活塞杆的期望位移与实际输出位移 之差, 找到满足性能指标的增益范围 。最后, 在运行模 型中设置好运行时间及采样周期, 点击运行, 即可得到 仿真结果。
3 仿真结果
当 k4 = 250 时, 实际位移与期望位移的关系曲线如 图 2~3 所示 。 由图可知, 液压缸活塞实际位移与期望位 移之间的稳态误差是符合要求的, 但动态跟踪误差超过 了预期设定的范围, 即超过了 0.015 m。
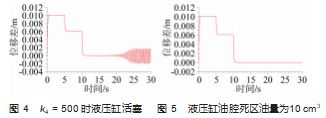
当 k4 = 500 时, 实际位移与期望位移的关系曲线如 图 4 所示 。 由图可知, 虽然动态跟踪误差满足要求, 但 稳态误差超标了, 超过了 0.000 5 m。
通过调整增益, 得到当增益范围为 443.5 ~ 478 时能够满足性能的指标 。在这个范围内, 位置跟踪系统具有 较好的闭环跟踪效果 。通过反复调整 、分析, 可以得出 以下结论:
( 1 ) 通过调整增益 4. 在小范围内, 增益与响应速 度呈现了正相关的关系, 即增益 4 增大的同时液压缸响 应速度变快了, 则动态跟踪误差变小了; (2 ) 任何调整 都会有过犹不及的结果, 若增益 4 的值调整的过大, 系 统运行一段时间后, 跟踪曲线会出现超调, 系统存在明 显的振荡, 不稳定。
因此, 在实际应用中, 为使系统保持一定的稳定性, 可以根据要得到的精度和具体要求进行实时调整, 进而 通过获得较佳的增益值来获得较佳的输出。
另外, 液压缸油腔死区的含油量对系统也有一定的 影响, 当将液压缸油腔死区油量从默认值 50 cm3 改为 10 cm3 仿真运行后, 得到如图 5 所示的曲线 。 比较图 4~5 可 以得出, 液压缸油腔区油量越大, 系统越不稳定 。这是 因为油液有一定的可压缩性, 当含油量越大时, 压缩性 就越明显, 系统就越不稳定。
4 结束语
本文基于 AMESin 对液压缸的位置控制系统进行了仿真研究, 将液压系统的性能输出作为结论反推液压元件的设计要求, 详细分析了增益设置的大小对动态输出 及稳态输出的影响, 得到需要根据实际的输出进行反复 调整以获得较佳的输出结果 。 同时, 液压系统中液压缸 油腔死区的含油量越大, 系统越不稳定 。通过仿真取得 了需要经过繁琐的流体计算和大量的测试实验才能得出 的结论 。利用 AMESim 的仿真特性, 为系统的设计及成 型提供了参考, 提高了设计效率。
参考文献:
[ 1] 初琦,刘勤, 史利娟,等 . 基于可靠性仿真的液压系统稳定性优 化设计[J]. 兵器装备工程学报,2022.43(6):255-260.
[2] 谭壮壮, 曲文星,岳元龙 . 水下生产控制系统液压子系统仿真 与优化设计[J]. 自动化仪表,2022.43(4):67-71.
[3] 沈仙法,冯利, 陈晓颖 . 汽车悬架弹性元件动态疲劳试验台液 压系统设计与仿真[J]. 机电工程技术,2022.51(3):74-77.
[4] 王吉平,王力,邓阳泰 .EBZ75 型掘进机截割部液压系统设计及 仿真分析[J]. 科学技术创新,2022(4): 150- 153.
[5] 梁全, 苏齐莹 . 液压系统 AMESim 计算机仿真指南[M]. 北京:机 械工业出版社,2014:87-89.
[6] 魏君 . LMS Imagine. Lab AMESim Rev 8B[J]. CAD/CAM 与制造 业信息化,2009( 11):51-52.
[7] 王洁 ,赵晶 . 液压元件[M]. 北京 :机械工业出版社 ,2013: 107-109.
[8] 马长林,黄先祥,郝琳 . 基于 AMESim 的电液伺服系统仿真与优 化研究[J]. 液压气动与密封,2006( 1):32-34.
[9] 肖岱宗 .AMESim 仿真技术及其在液压元件设计和性能分析 中的应用[J]. 舰船科学技术,2007(S1): 142- 145.
[ 10] 余佑官,龚国芳, 胡国良 .AMESim 仿真技术及其在液压系统 中的应用[J]. 液压气动与密封,2005(3):28-31.
[ 11] 秦家升, 游善兰 .AMESim 软件的特征及其应用[J]. 工程机械, 2004( 12):6-8.
[ 12] 王以伦 . 液压传动[M]. 哈尔滨:哈尔滨工程大学出版社,2005:62- 15.
关注SCI论文创作发表,寻求SCI论文修改润色、SCI论文代发表等服务支撑,请锁定SCI论文网!
文章出自SCI论文网转载请注明出处:https://www.lunwensci.com/ligonglunwen/63940.html